
3D Measurement Method for Saturated Highlight Characteristics on Surface of Fuel Nozzle

Abstract
:1. Introduction
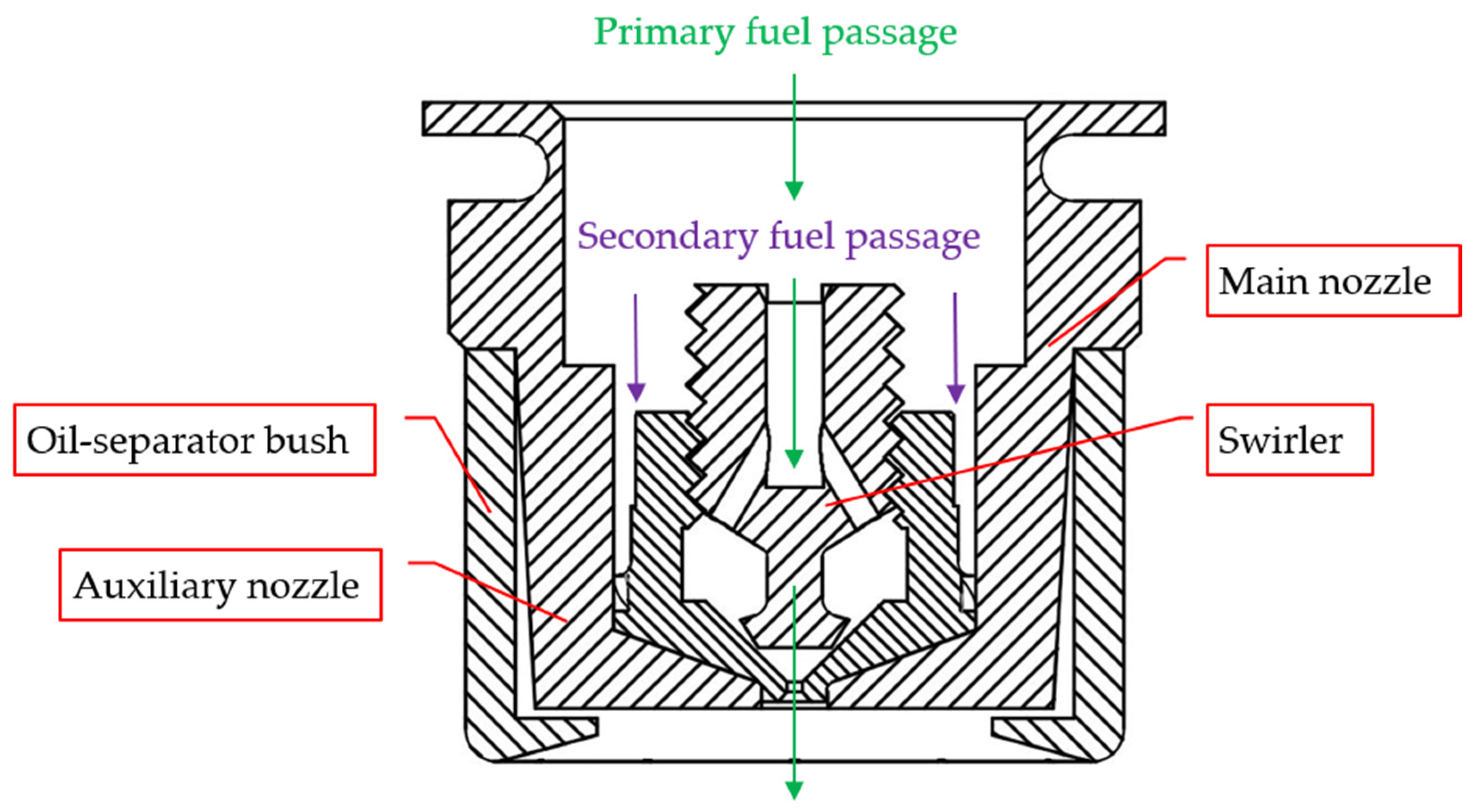
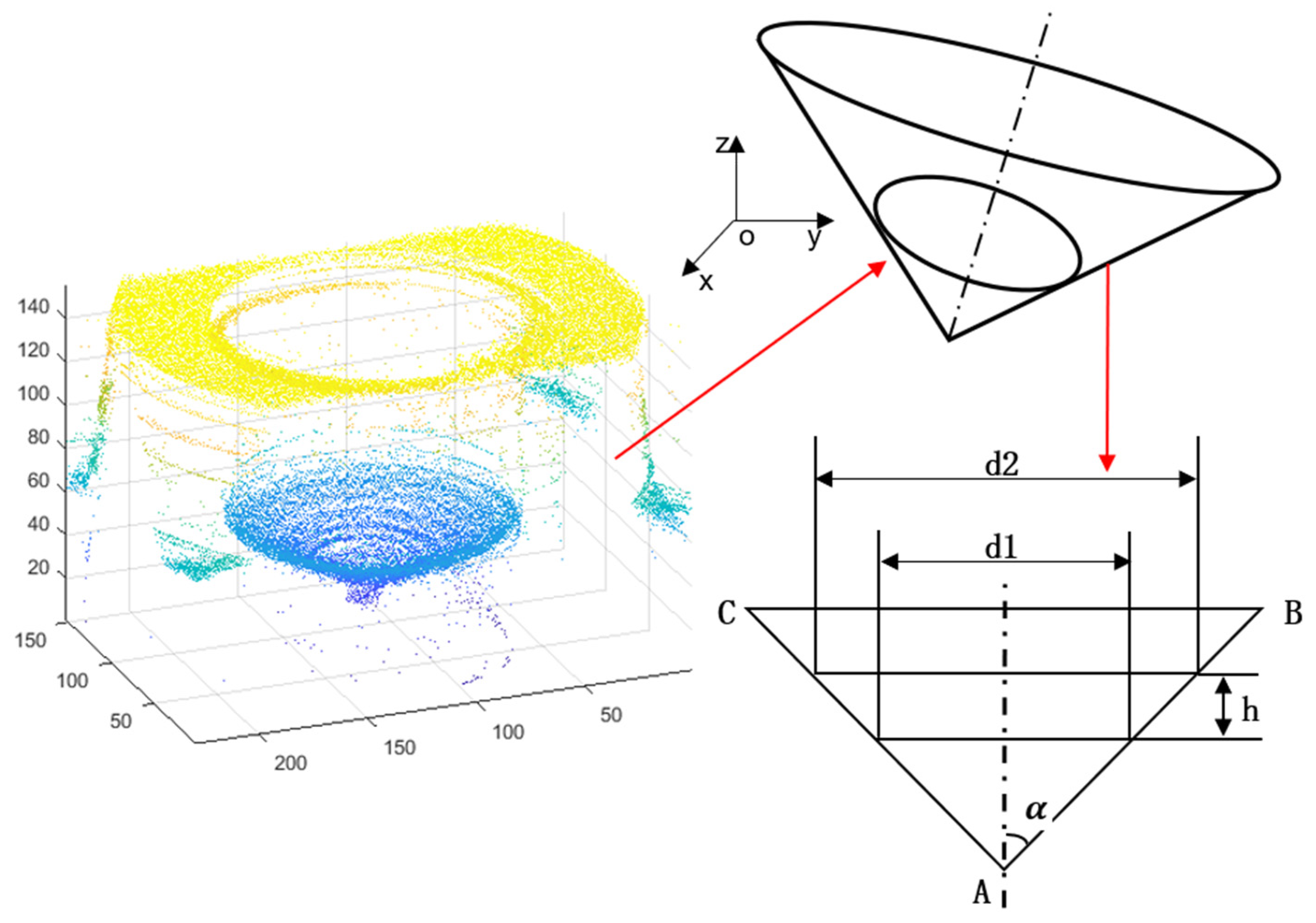
2. Measuring Principle of Fuel Nozzle
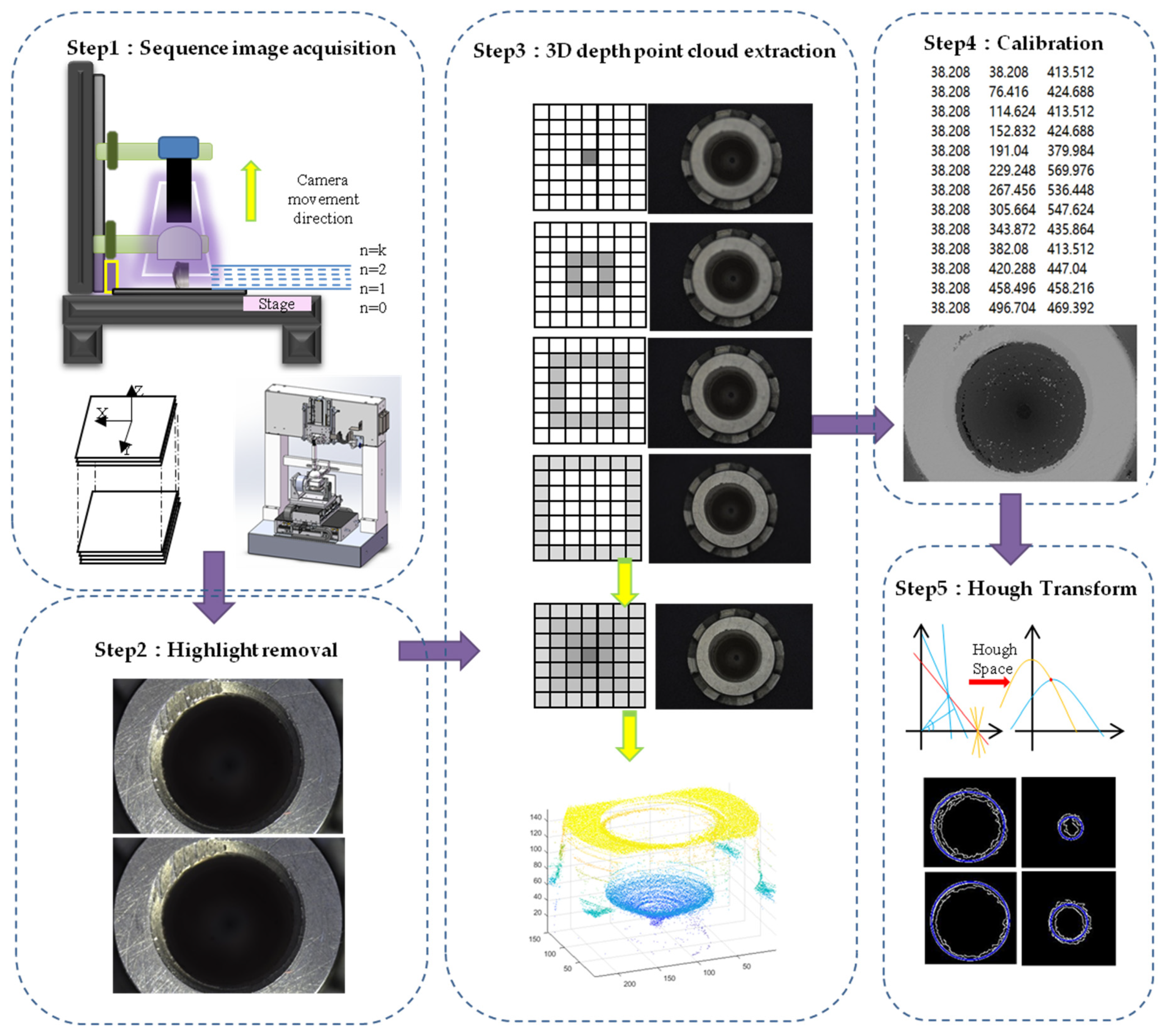
3. Proposed Method
3.1. Highlight Removal in Sequence Images
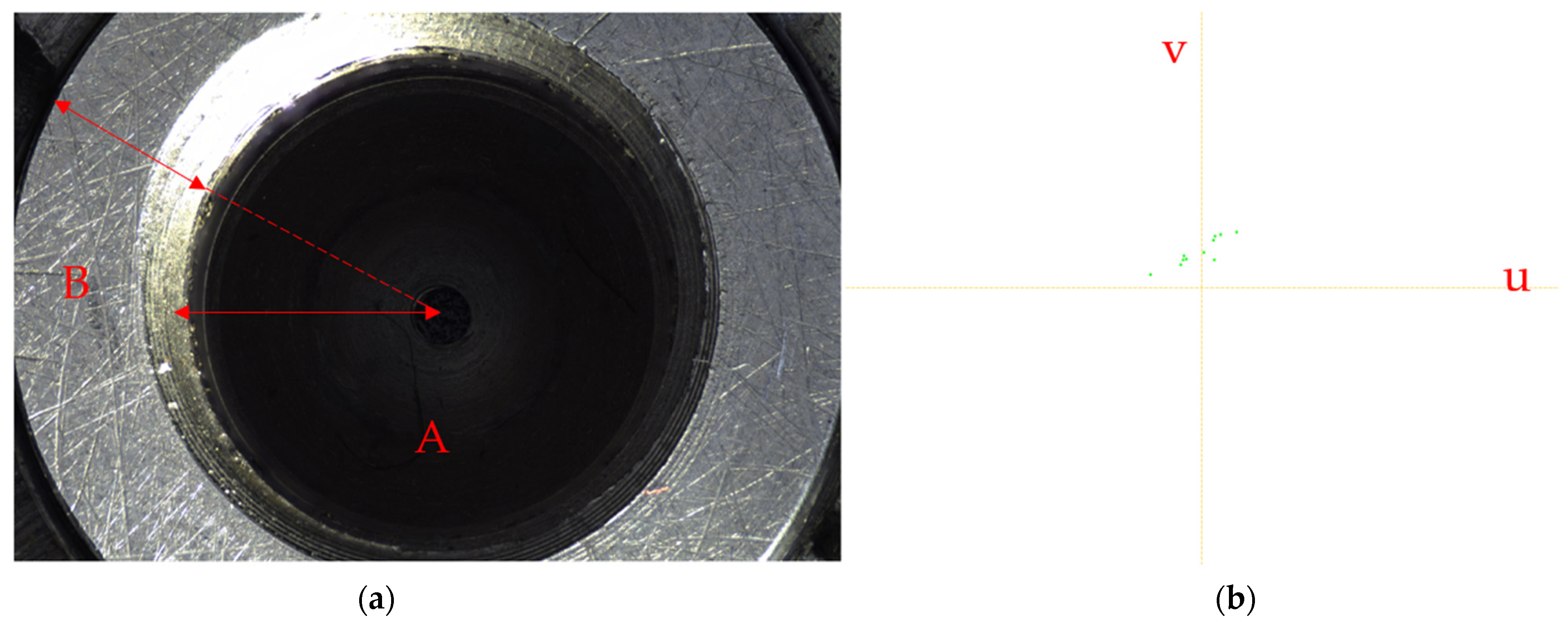
- Step 1:
- According to the texture information of sequence images of the fuel nozzle, it can be segmented into two main regions as shown in Figure 4a: area A of inlet hole A and area B of the entrance annular.
- Step 2:
- The patch size is important for the inpainting method based on MRF. It will directly affect the inpainting effect. The patch size is too small to maintain the consistency of texture information, and it is too large to maintain the fine texture information. According to the RSS value [33], which is used to adaptively select the patch size, and considering the window size of sharpness evaluation operator, the patch size of inpainting is assigned as 12 × 12, which can better maintain the texture characteristics and obtain a shorter calculation time. A suitable patch size can optimize the patch offset in each segmented area and constrain the initialization offset map of sequence images with highlights in focus.
- Step 3:
- After initialization, the offset of the best matching patch in each subregion is as follows:where represents the offset coordinate value, represents the position of each patch, and represents the sample patch of the center point at the patch size of 12 × 12. The squared Euclidean distance is used to indicate the similarity of the two sample patches, excluding the matching patch near the sample patch with the value τ.
- Step 4:
- After obtaining the optimized image offset map, the histogram statistics are used on the offset map of the image, and the approximate offset value is calculated by using the Nearest-Neighbor Field (NNF) algorithm [29] based on Kd-tree and propagated iteratively to obtain the best matching patch and offset map [34]. The 2D histogram statistics for all offsets are given in Equation (2):
- Step 5:
- The image inpainting method is based on MRF (Markov Random Field), and the Graph-cut algorithm is proposed to solve the global energy based on the sample patch:
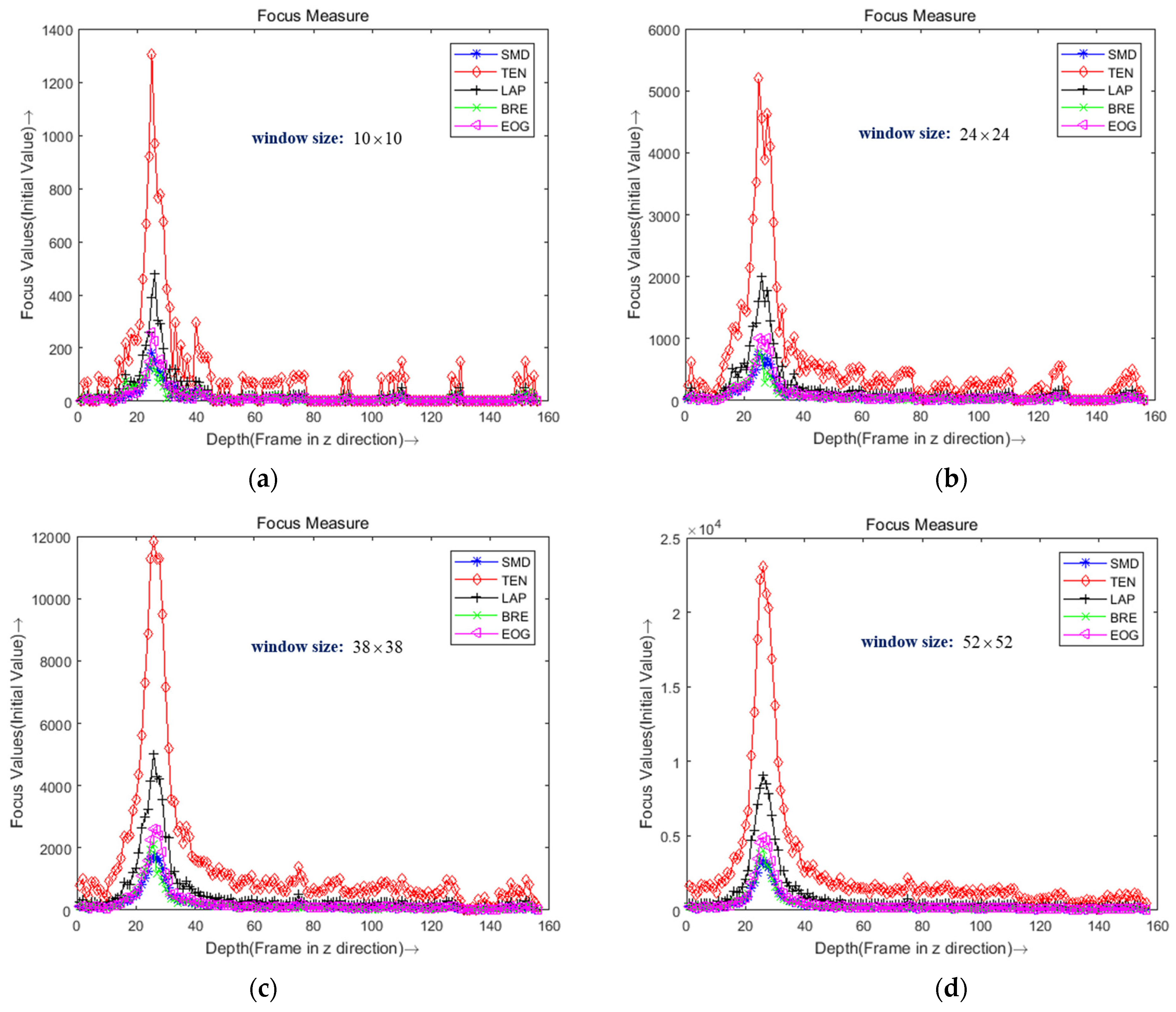
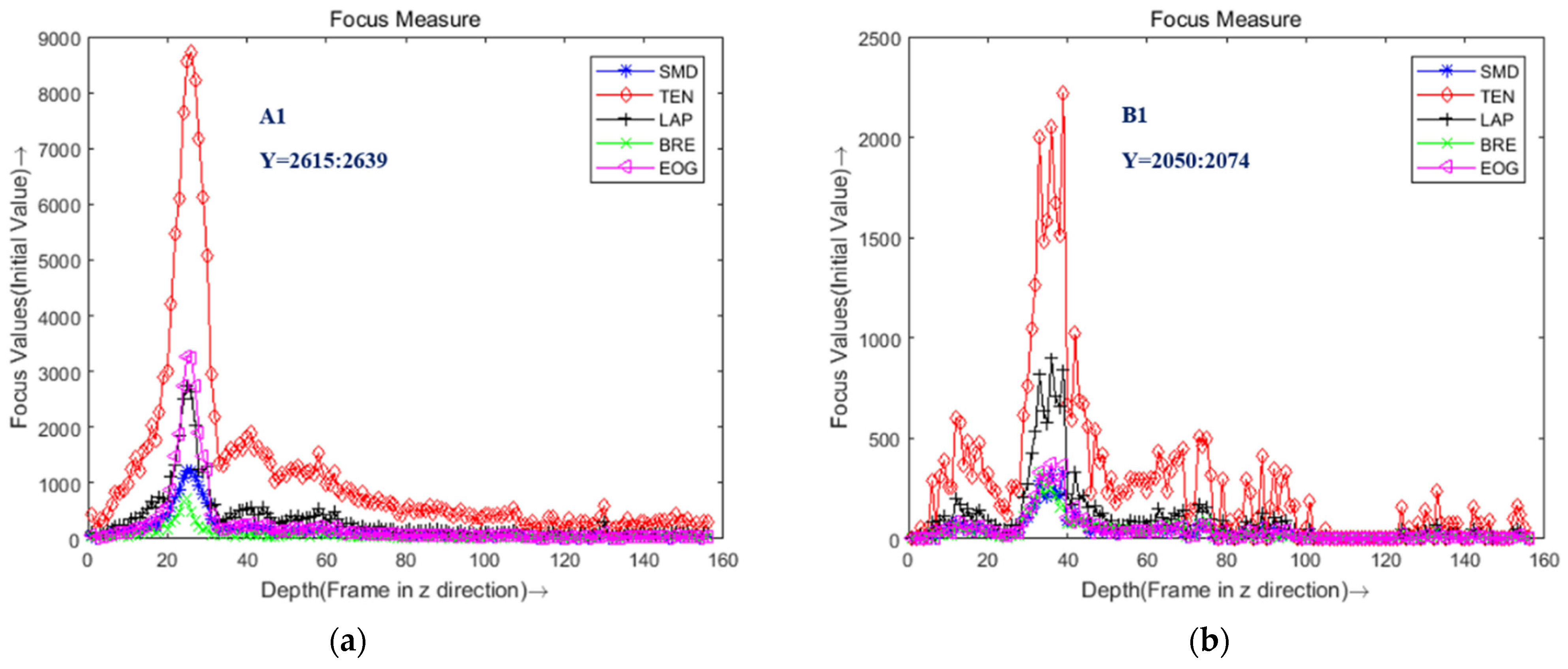
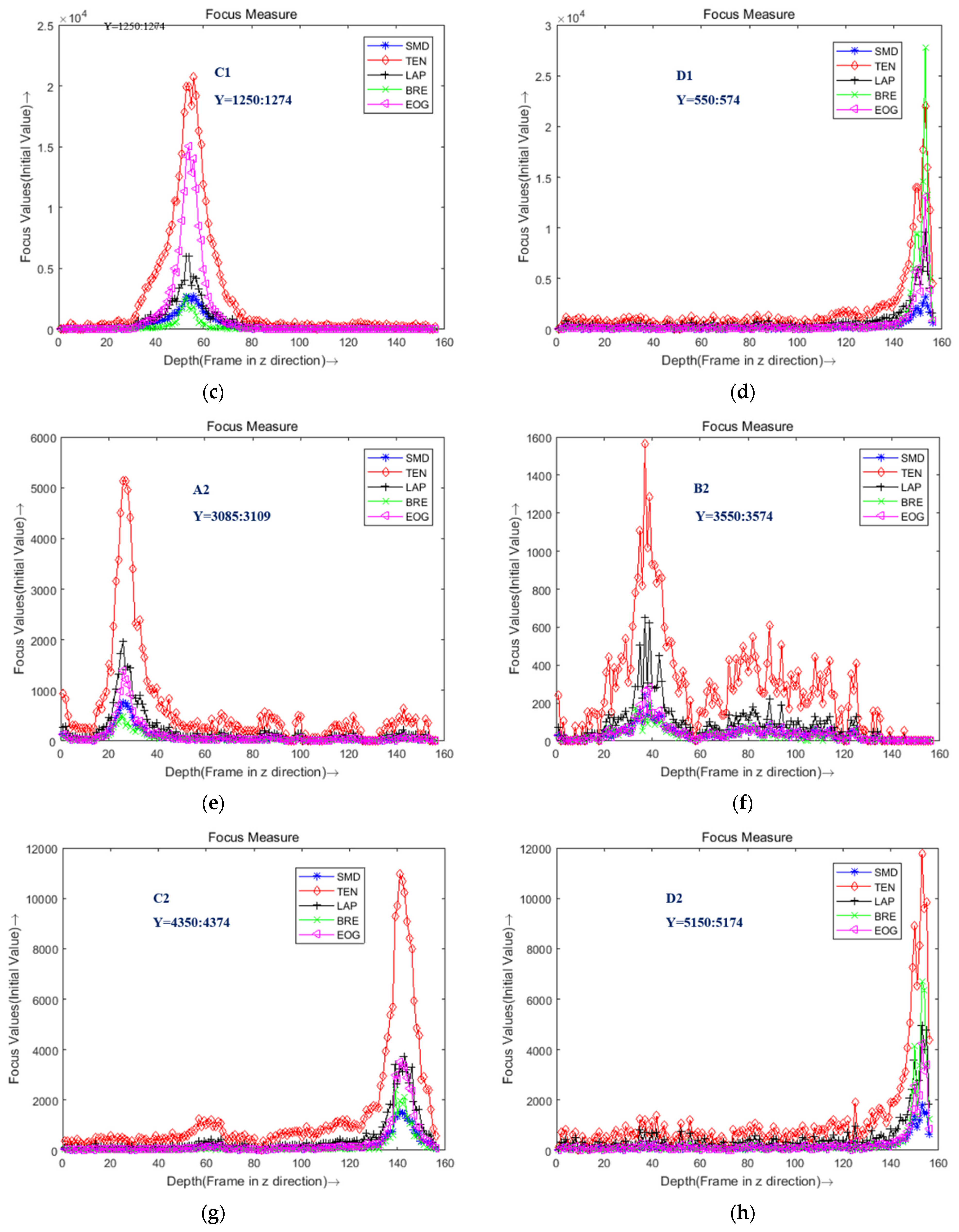
3.2. Sharpness Evaluation Function
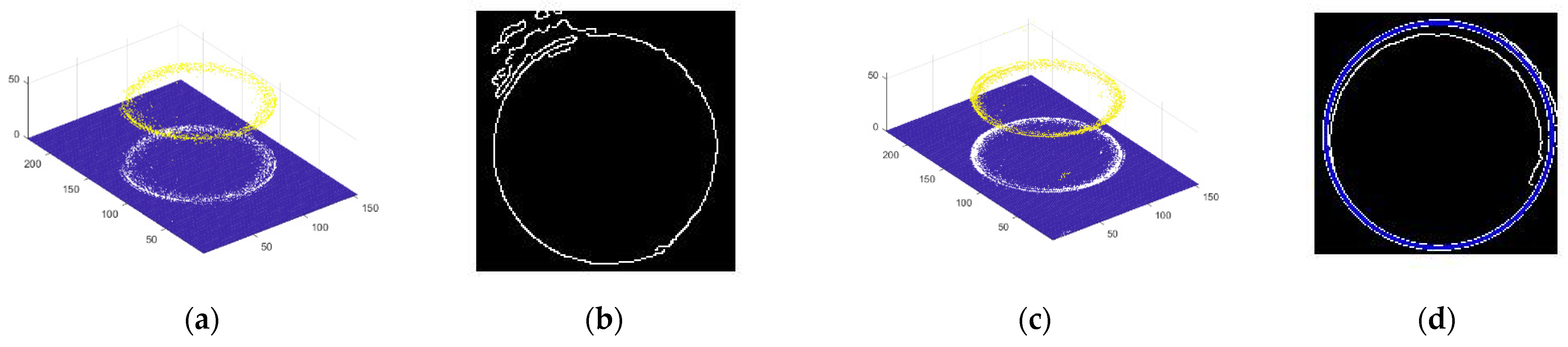
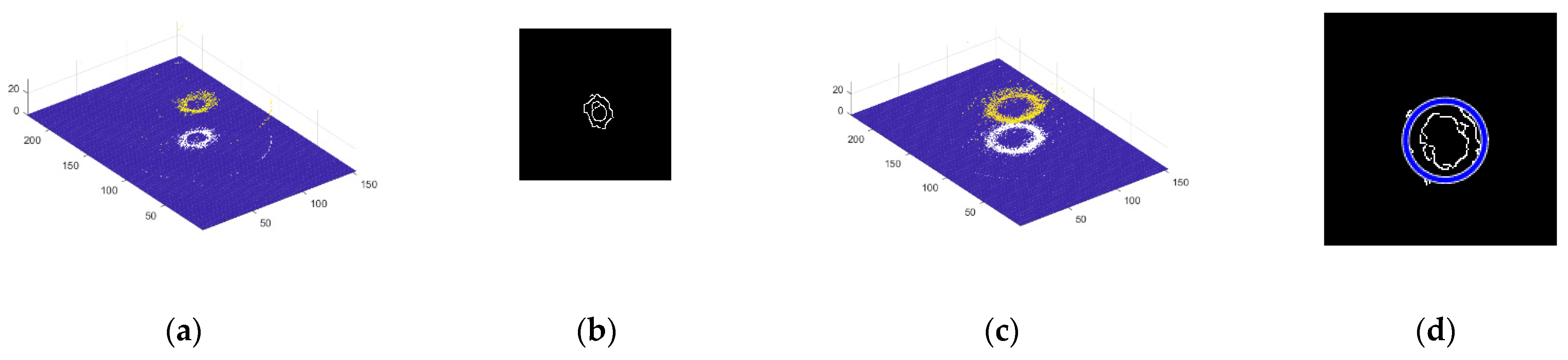
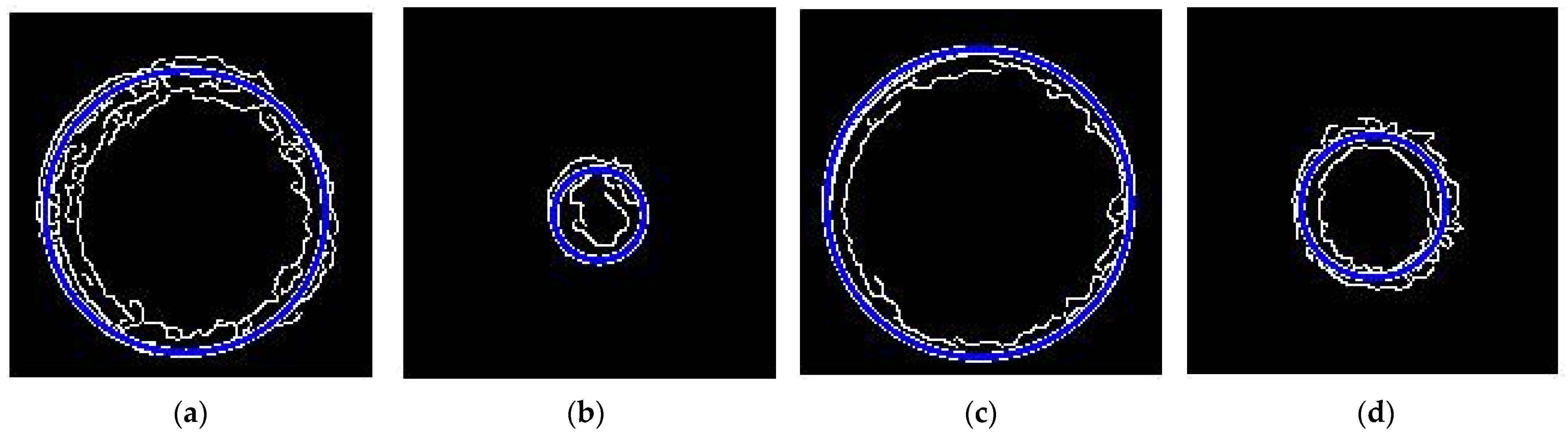
3.3. Hough Transform for Circle Detection
4. Experimental Verification
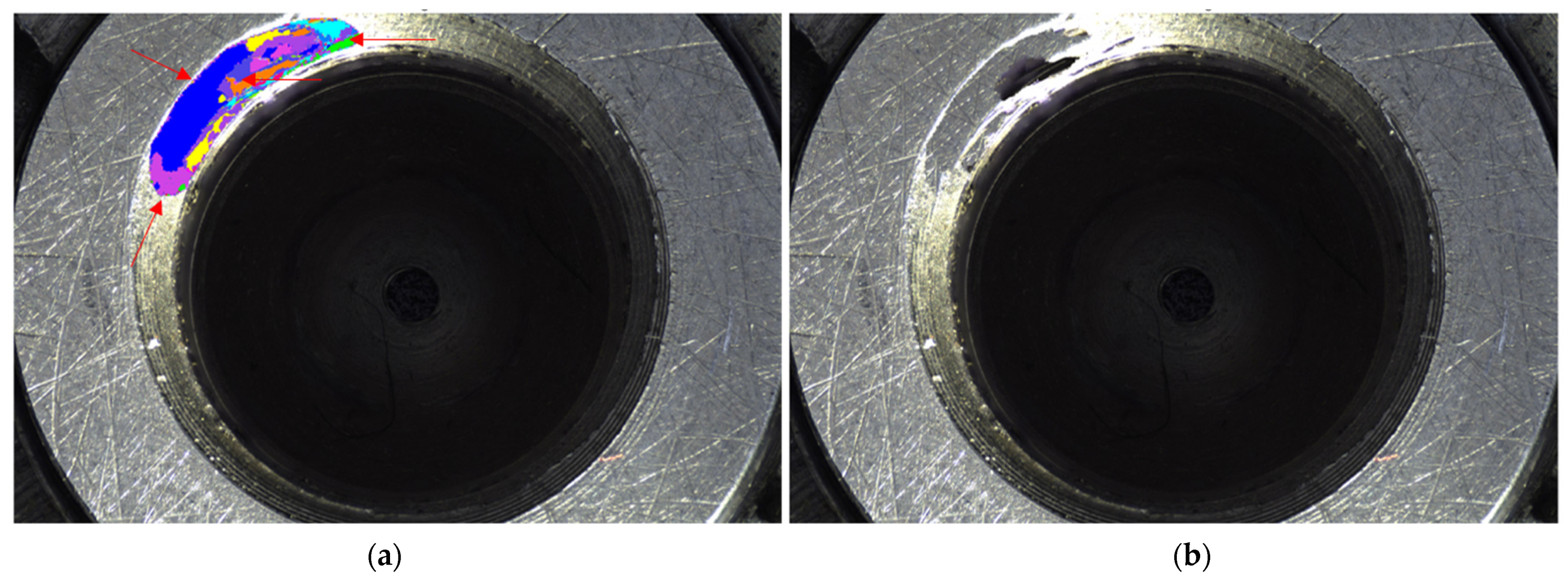
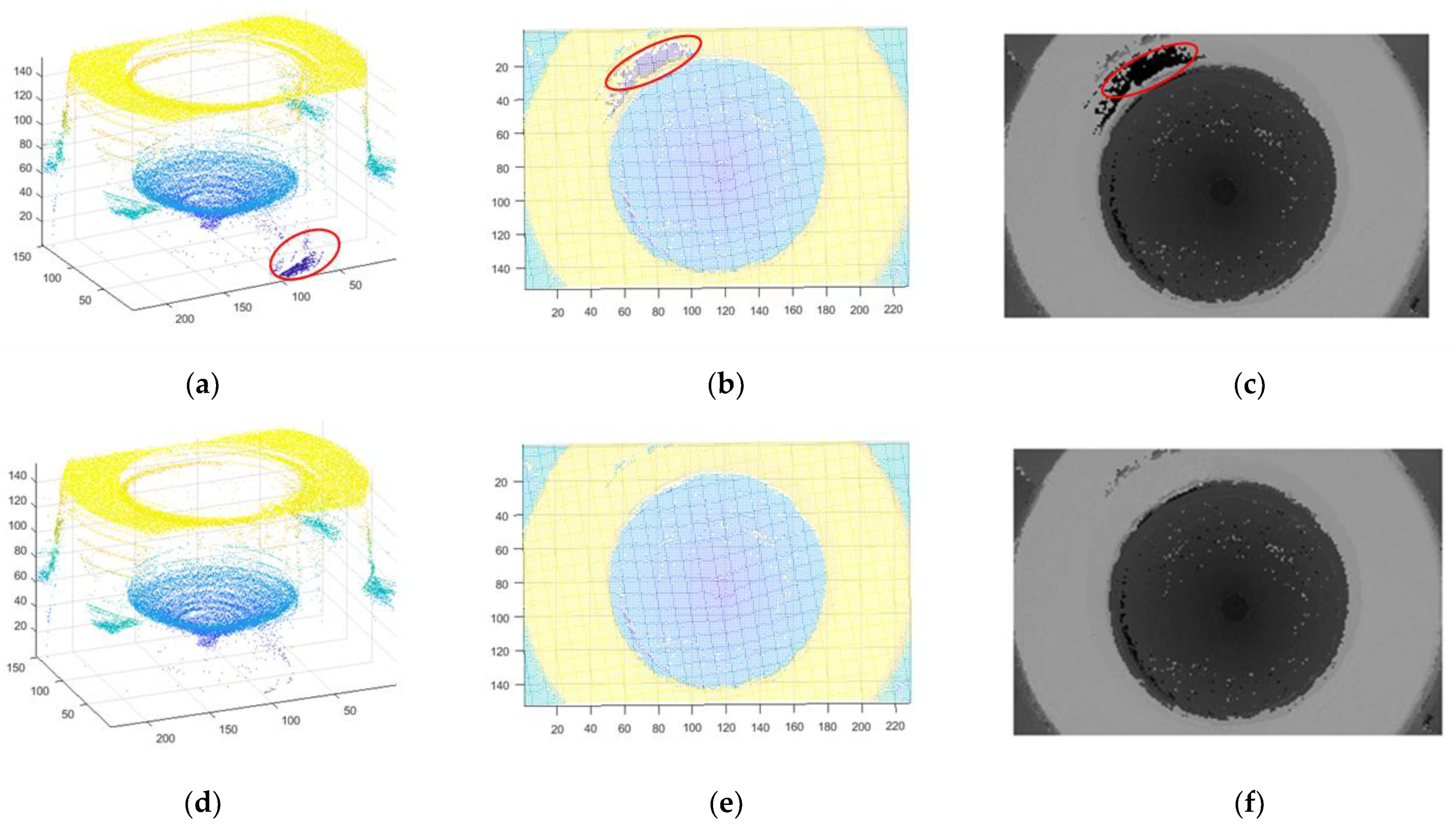
4.1. Highlight Removal and Topography Reconstruction
4.2. Diameter Measurement
4.3. Conical Degree of Fuel Nozzle
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Peiner, E.; Balke, M.; Doering, L. Form measurement inside fuel injector nozzle spray holes. Microelectron. Eng. 2009, 86, 984–986. [Google Scholar] [CrossRef]
- Jermak, C.J.; Barisic, B.; Rucki, M. Correction of the metrological properties of the pneumatic Length measuring gauges through changes of the measuring nozzle head surface shape. Measurement 2010, 43, 1217–1227. [Google Scholar] [CrossRef]
- Yan, Y.; He, Z.; Zhong, W.; Jiang, Z.; Fu, Y. Measurement of diesel nozzle Geometry with X-Ray Phase Contrast Imaging Technique. Adv. Mater. Res. 2013, 694–697, 1224–1228. [Google Scholar] [CrossRef]
- Li, C.; Mickan, B. Flow characteristics and entrance length effect for MEMS nozzles. Flow Meas. Instrum. 2013, 33, 212–217. [Google Scholar] [CrossRef]
- Fei, Z.; Wang, K.; Wang, H.; Xiao, Y. The inner-cone angle measurement of aero-engine nozzle based on conoscopic holography. Optik 2018, 169, 416–423. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, W.; Wu, Z.; Gong, H.; Hu, Z.; Deng, J.; Li, L. The measurement of internal surface characteristics of fuel nozzle orifices using the synchrotron X-ray micro-CT technology. Sci. China Technol. Sci. 2018, 61, 11. [Google Scholar] [CrossRef]
- Laguarta, F.; Artigas, R.; Cadevall, C. 3D shape measurement of nozzles on the micrometric scale. Opt. Metrol. Prod. Eng. 2004, 5457, 74–82. [Google Scholar]
- Huang, K.; Ye, Y. A novel machine vision system for the inspection of micro-spray nozzle. Sensors 2015, 15, 15326–15338. [Google Scholar] [CrossRef] [Green Version]
- Payri, F.; Bermudez, V.; Payri, R.; Salvador, F.J. The influence of cavitation on the internal flow and the spray characteristics in diesel injection nozzles. Fuel 2005, 83, 419–431. [Google Scholar] [CrossRef]
- Tian, J.; Yao, G.; Zang, Q. Failure Analysis of Outer Swirls in the Fuel Nozzle. Key Eng. Mater. 2007, 353–358, 78–80. [Google Scholar] [CrossRef]
- Tang, J.; Qiu, Z.; Li, T. A novel measurement method and application for grinding wheel surface topography based on shape from focus. Measurement 2019, 133, 495–507. [Google Scholar] [CrossRef]
- Pertuz, S.; Puig, D.; Garcia, M. Analysis of focus measure operators for shape from focus. Pattern Recognit. 2013, 46, 1415–1432. [Google Scholar] [CrossRef]
- Nayar, S.K.; Nakagawa, Y. Shape from focus: An effective approach for rough surfaces. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; pp. 13–18. [Google Scholar]
- Asif, M.; Choi, T.S. Shape from focus using multilayer feedforward neural networks. IEEE Trans. Image Process. 2001, 10, 1670–1675. [Google Scholar] [CrossRef] [Green Version]
- Gladines, J.; Sels, S.; Blom, J.; Vanlanduit, S. A fast shape from focus-based surface topography measurement method. Sensors 2021, 21, 2574. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Xiang, P.; Zhang, F. Polarization-based method of highlight removal of high-reflectivity surface. Optik 2020, 221, 165345–165355. [Google Scholar] [CrossRef]
- Li, R.; Pan, J.; Si, Y.; Yan, B.; Hu, Y.; Qin, H. Specular Reflections Removal for Endoscopic Image Sequences with Adaptive-RPCA Decomposition. IEEE Trans. Med. Imaging 2019, 39, 328–340. [Google Scholar] [CrossRef] [PubMed]
- Suo, J.; An, D.; Ji, X.; Wang, H.; Dai, Q. Fast and high-quality highlight removal from a single image. IEEE Trans. Image Process. 2016, 25, 5441–5454. [Google Scholar] [CrossRef] [Green Version]
- Tan, P.; Lin, S.; Quan, L.; Shum, H.Y. Highlight removal by illumination constrained inpainting. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 164–169. [Google Scholar]
- Shen, H.L.; Zheng, Z.H. Real time highlight removal using intensity ratio. Appl. Opt. 2013, 52, 4483–4494. [Google Scholar] [CrossRef] [Green Version]
- Yu, D.; Han, J.; Jin, X.; Han, J. Efficient highlight removal of metal surfaces. Signal Process. 2014, 103, 367–379. [Google Scholar] [CrossRef]
- Iyogun, C.O.; Birouk, M.; Kozinski, J.A. Experimental investigation of the effect of fuel nozzle geometry on the stability of a swirling non-premixed methane flame. Fuel 2011, 90, 1416–1423. [Google Scholar] [CrossRef]
- David, J.; Farquhar, B.W.; Hoffman, J.D. An analytical and experimental investigation of swirling flow in nozzles. AIAA J. 1992, 7, 1992–2000. [Google Scholar]
- Tsai, D.Y.; Lin, J. Characteristics of the plume particles removed by a swirling flow nozzle in laser ablation. Opt. Laser Technol. 2007, 39, 219–224. [Google Scholar] [CrossRef]
- Cheng, W.; Wang, Z.; Zhou, L.; Shi, J.; Sun, X. Infrared Signature of serpentine nozzle with engine swirl. Aerosp. Sci. Technol. 2019, 8, 24. [Google Scholar] [CrossRef]
- Ma, Z.; Kim, D.; Shin, Y.G. Shape from focus reconstruction using nonlocal matting Laplacian prior followed by MRF-based refinement. Pattern Recognit. 2020, 103, 107302. [Google Scholar] [CrossRef]
- Ruzic, T.; Pizurica, A. Context aware patch-based image inpainting using Markov Random Field modeling. IEEE Trans. Image Process. 2015, 24, 444–456. [Google Scholar] [CrossRef]
- Ceulemans, B.; Lu, S.P.; Lafruit, G.; Schelkens, P.; Munteanu, A. Efficient MRF-based disocclusion inpainting in Multiview video. In Proceedings of the IEEE International Conference on Multimedia and Expo, Seattle, WA, USA, 11–15 July 2016; pp. 1–6. [Google Scholar]
- Barnes, C.; Shechtman, E.; Finkelstein, A.; Goldman, D.B. PatchMatch: A randomized correspondence algorithm for structural image editing. ACM Trans. Graph. 2009, 3, 35–45. [Google Scholar]
- He, K.; Sun, J. Image Completion Approaches Using the statistics of similar patches. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 12, 2423–2435. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Li, Z. Markov Random Field-based image inpainting with direction structure distribution analysis for maintaining structure coherence. Signal Process. 2019, 9, 182–197. [Google Scholar] [CrossRef]
- Li, Z.; Liu, J.; Cheng, J. Exploiting Multi-Direction Features in MRF-Based Image Inpainting Approaches. IEEE Access 2019, 1, 179905–179917. [Google Scholar] [CrossRef]
- Li, C.; He, K.; Liu, K.; Ma, X. Image inpainting using two-stage loss function and global and local markovian discriminators. Sensors 2020, 20, 6193. [Google Scholar] [CrossRef]
- Fan, Q.; Zhang, L. A novel patch matching algorithm for exemplar-based image inpainting. Multimed. Tools Appl. 2017, 77, 10807–10821. [Google Scholar] [CrossRef]
- Jang, H.S.; Yun, G.; Mutahira, H.; Muhammad, M.S. A new focus measure operator for enhancing image focus in 3D shape recovery. Microsc. Res. Tech. 2021, 84, 2483–2493. [Google Scholar] [CrossRef] [PubMed]
- Yan, T.; Hu, Z.; Qiao, Z.; Zhang, L. 3D shape reconstruction from multifocus image fusion using a multidirectional modified Laplacian operator. Pattern Recognit. 2020, 98, 107065. [Google Scholar] [CrossRef]
- Ali, U.; Lee, I.H.; Mahmood, M.T. Guided image filtering in shape from focus: A comparative analysis. Pattern Recognit. 2021, 111, 107670. [Google Scholar] [CrossRef]
- Djekoune, A.O.; Messaoudi, K.; Amara, K. Incremental circle Hough Transform: An improved method for circle detection. Optik 2017, 133, 17–31. [Google Scholar] [CrossRef]
- Su, Y.; Zhang, X.; Cuan, B.; Liu, Y.; Wang, Z. A Sparse structure for fast circle detection. Pattern Recognit. 2019, 97, 107022. [Google Scholar] [CrossRef]
- Borrmann, D.; Elseberg, J.; Lingemann, K.; Nuchter, A. The 3D Hough Transform for plane detection in point clouds: A Review and a new accumulator Design. 3D Res. 2011, 2, 3. [Google Scholar] [CrossRef]
- Camurri, M.; Vezzani, R.; Cucchiara, R. 3D Hough Transform for sphere recognition on point clouds. Mach. Vis. Appl. 2014, 25, 1877–1891. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuel Nozzle | Specular | Specular-Free | Keyence | Specular Error | Specular-Free Error |
|---|---|---|---|---|---|
| No. 1 | 5233.00 | 5142.00 | 5063.05 | 170.00 | 78.95 |
| No. 2 | none | 5161.00 | 5082.03 | none | 78.97 |
| No. 3 | 5325.00 | 5175.00 | 5088.78 | 236.22 | 86.22 |
| No. 4 | 5311.00 | 5154.00 | 5069.98 | 241.02 | 84.02 |
| No. 5 | 5265.00 | 5160.00 | 5076.53 | 188.47 | 83.47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Hou, L.; Chen, Y. 3D Measurement Method for Saturated Highlight Characteristics on Surface of Fuel Nozzle. Sensors 2022, 22, 5661. https://doi.org/10.3390/s22155661
Li Y, Hou L, Chen Y. 3D Measurement Method for Saturated Highlight Characteristics on Surface of Fuel Nozzle. Sensors. 2022; 22(15):5661. https://doi.org/10.3390/s22155661
Chicago/Turabian StyleLi, Yeni, Liang Hou, and Yun Chen. 2022. "3D Measurement Method for Saturated Highlight Characteristics on Surface of Fuel Nozzle" Sensors 22, no. 15: 5661. https://doi.org/10.3390/s22155661