
Human Lower Limb Motion Capture and Recognition Based on Smartphones


Abstract
:1. Introduction
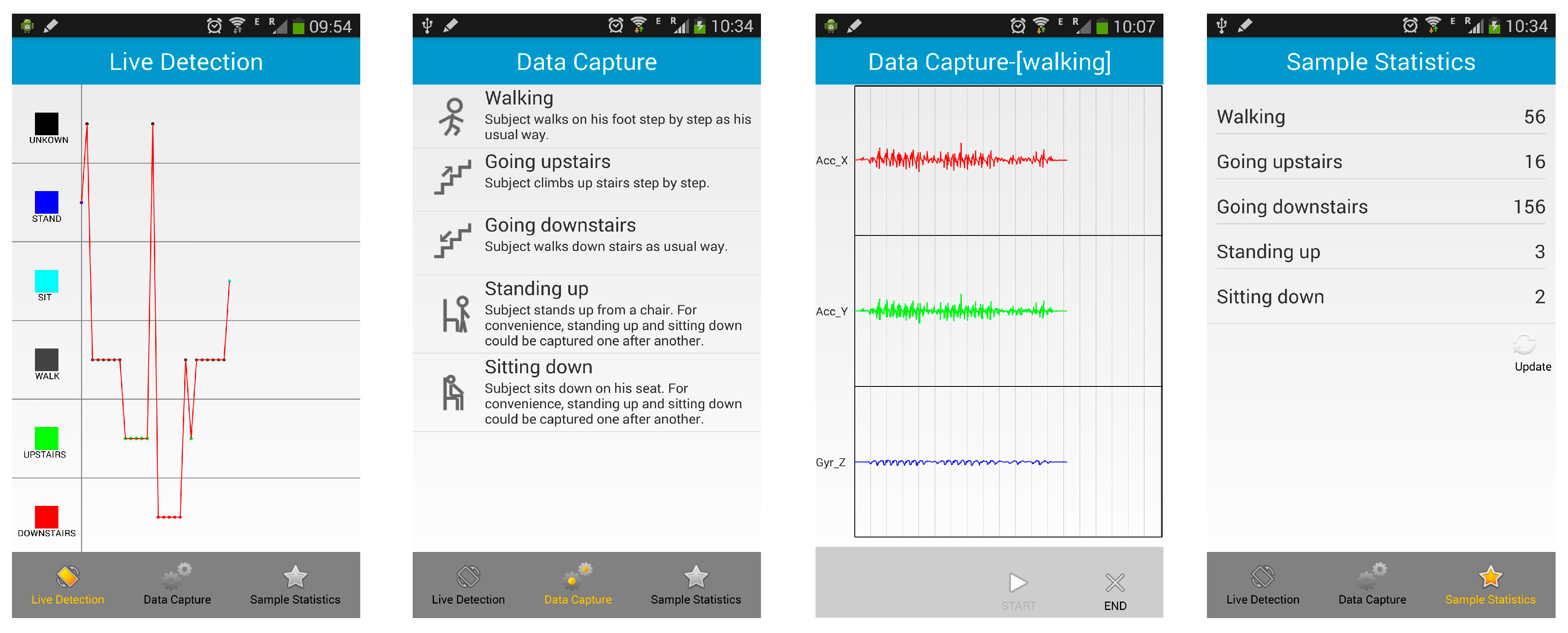
- We design a data logger to collect human lower limb motion data in real time using the embedded accelerometer and gyroscope of an Android-based Smartphone;
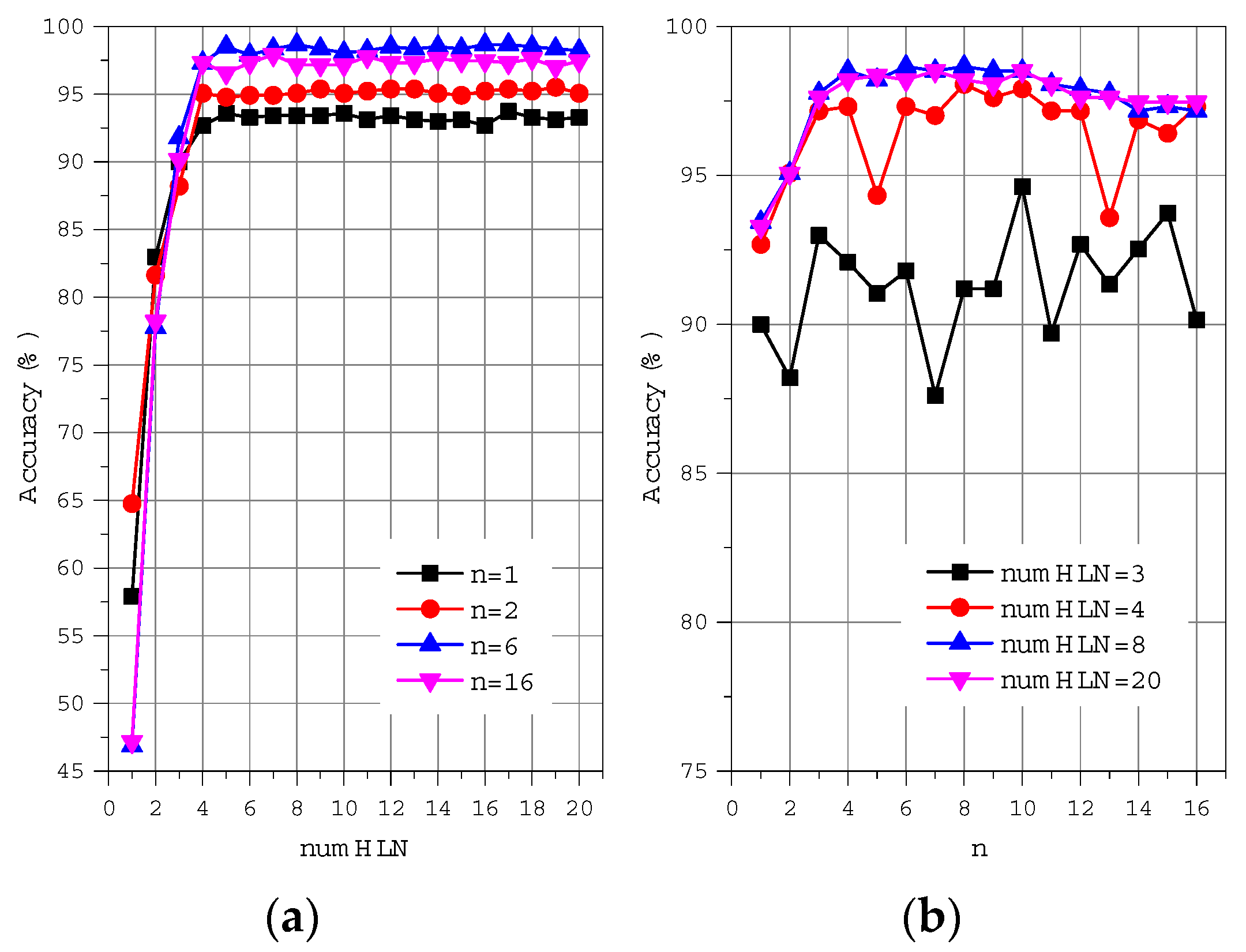
- In order to reduce the number of dimensions without degrading the recognition rate, we conduct several experiments to find the optimal subset of features vector using the K-folder cross-validation technique, because the large number of dimensions of the feature vector may induce the complexity of the classifier model and increase need for system resources, such as computing, storage, and energy;
- With the trained models, one can recognize five human lower limb activities with a high recognition rate. According to our experiments, we found sitting down is easiest identified among the five human lower limb motions, whatever classifier one applies. The Artificial Neural Network classifier has the best recognition performance, whereas the Naïve Bayes classifier has the best recognition rate for going downstairs and the worst recognition rate for the walking activity;
- We implement an activity live detection program for Android-based Smartphones using our proposed human lower limb motion capture and recognition method.
2. Related Work
3. Method
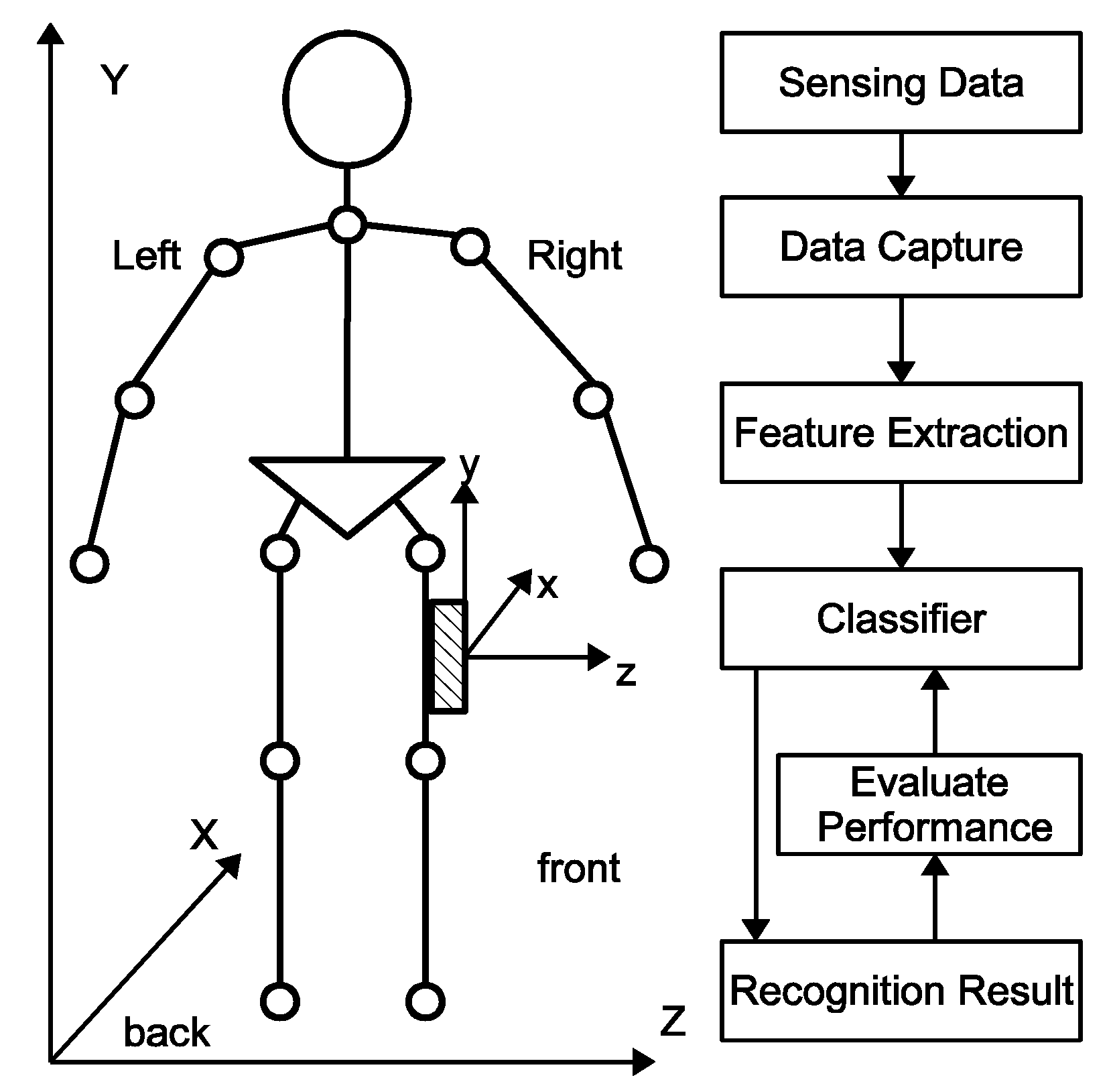
3.1. System Architecture
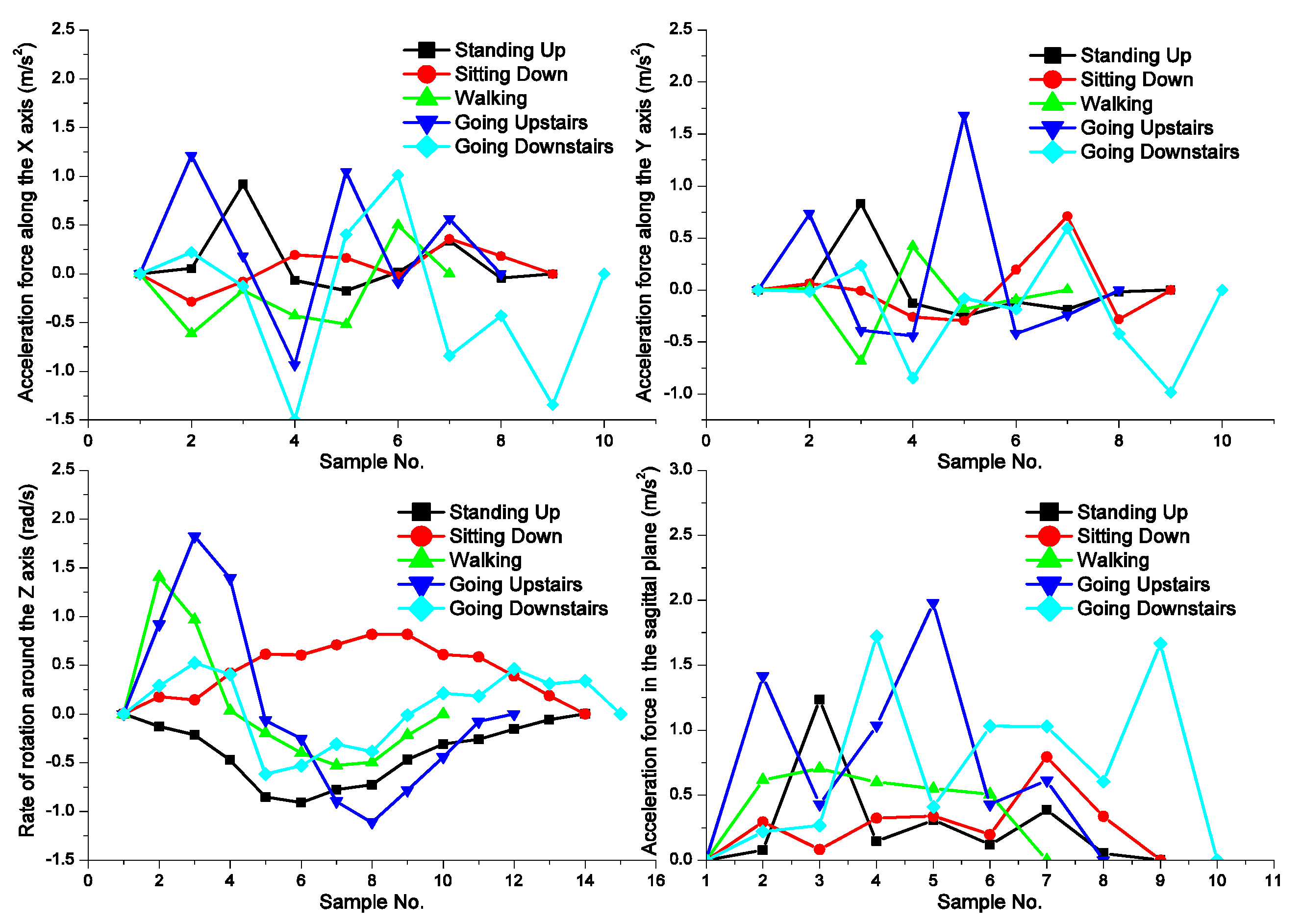
- Motion Data Capturing: The Smartphone has an Inertial Measuring Unit (IMU) with three built-in tri-axial sensors: accelerometer, gyroscope, and magnetometer. We attach the Smartphone on the right thigh. We record on a SD Card for later upload to a remote server and off-line processing of the three accelerations measured by the accelerometer and the three angular velocities measured by the gyroscope.
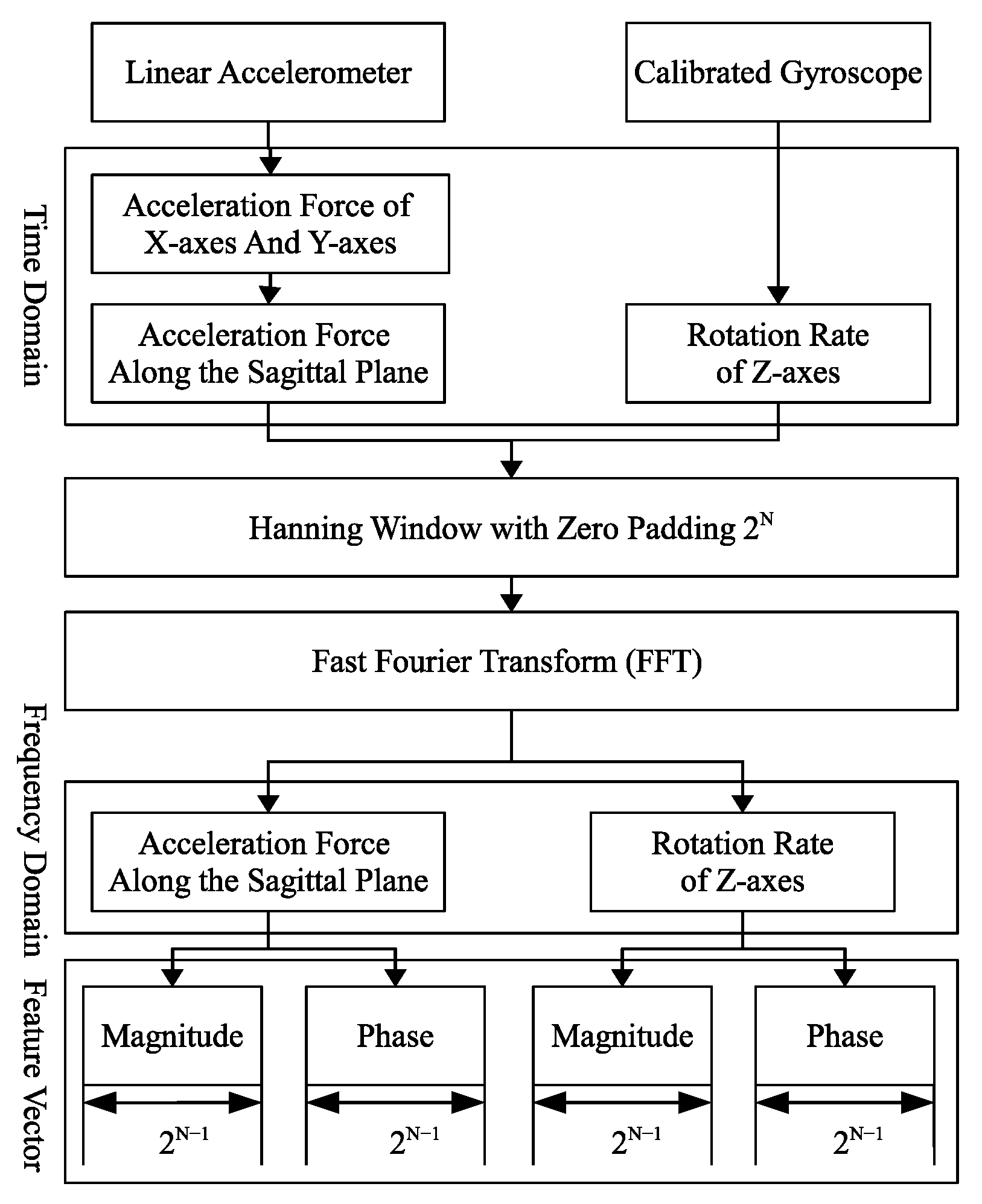
- Feature Extraction: FFT is a useful mathematical tool in signal processing, as it transforms data from the time into the frequency domain. We use the frequencies, magnitude, and phase within the frequency domain as motion features. Based on a large number of experiments, we could reduce with little effect on the probability of information loss the dimension of the features vector.
- Classifier: We use three classifiers: NB, KNN, and ANN. We train and evaluate these classifiers using the 10-fold cross-validation method, with 90% of data for training and 10% for testing.
3.2. Motion Data Collection
- Android systems typically use a smaller sampling rate, which is adequate for a human’s normal activity in their daily life [13];
- Smartphones use the least battery energy with this sampling rate because of a lower load on the processor.
3.3. Feature Extraction
3.4. Classifier
3.5. Live Detection Algorithm
| Algorithm 1. Human Lower Limb Motion Live Detection Algorithm |
| INPUT: time series of accelerometer tacc; time series of gyroscope tgyr OUTPUT: activities 1: numTotalSample ← fsample × the length of time seriestacc, tgyr 2: numMaxCycleSample ← fsample × periodMaxCycle 3: WHILE startLocation < numTotalSample DO 4: locs ← findPeaks(startLocation: startLocation + numMaxCycleSample) 5: endLocation ← searchEndLocation(tacc, tgyr, locs) 6: acc ← tacc(startLocation: endLocation) 7: gyr ← tgyr(startLocation: endLocation) 8: x ← featureExtractionByFFT(acc, gyr) 9: prob, pred ← ANN(x) 10: proboptimal ← maximum(prob) 11: IF proboptimal ≥ ACCEPTABLE_ACCURACY THEN 12: activities ← maximum(pred) 13: startLocation ← endLocation(proboptimal); 14: ELSE 15: numEndLoc ← length of endLocation 16: startLocation ← endLocation(numEndLoc-1) 17: END IF 18: END WHILE |
4. Results
4.1. Preparation of Data Set
4.2. Determining Feature Vector Subsets
4.3. Classification Results
- The Naïve Bayes classifier has the best recognition rate for going downstairs and the worst recognition rate for the walking activity;
- Sitting down is the most easily identified among the five human lower limb motions, whatever classifier one applies. However, classification of walking, going downstairs, and going upstairs is sometimes incorrect;
- The Artificial Neural Network classifier has the best recognition performance, although it has the most errors for going downstairs.
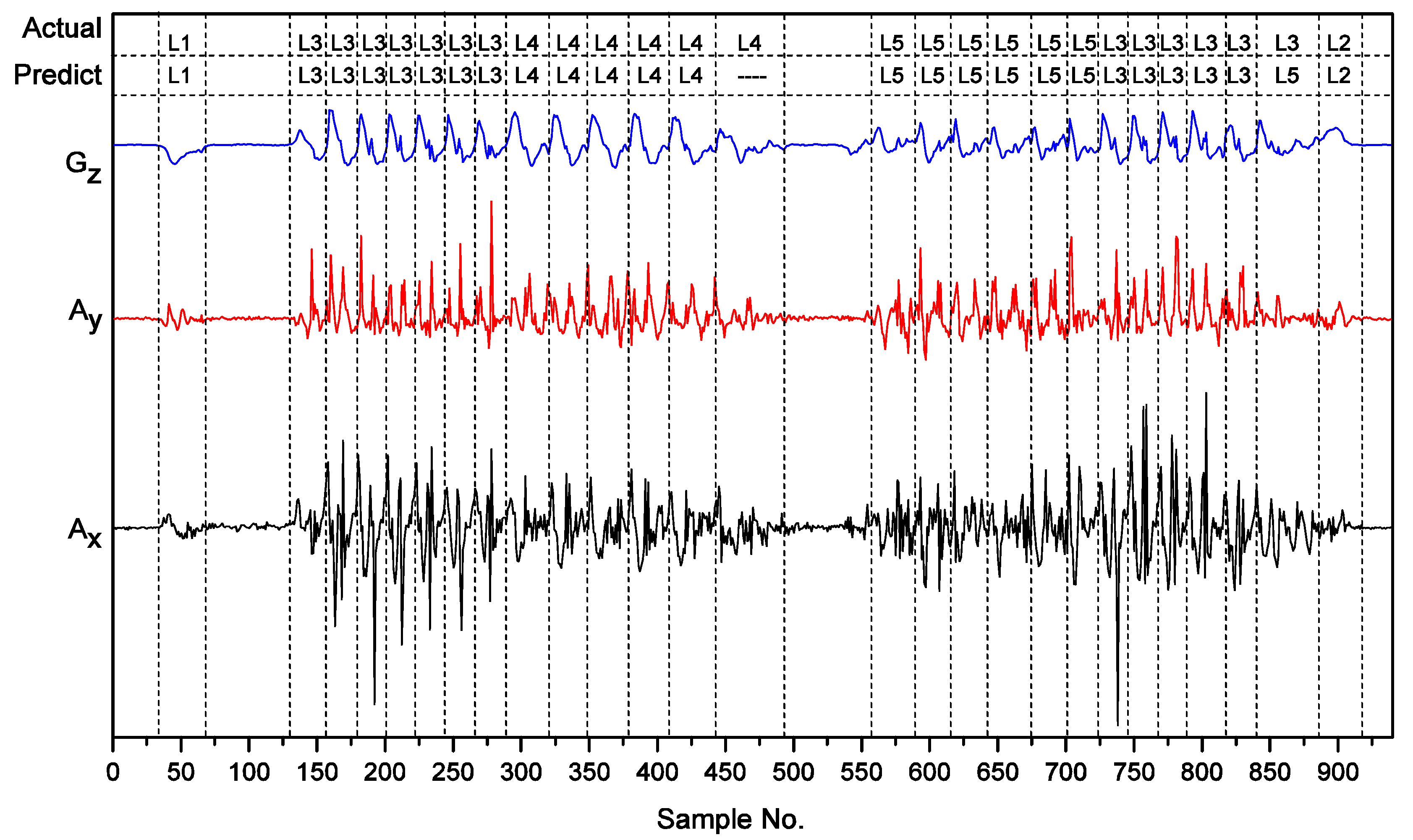
4.4. Live Detection
- sitting in a chair for 2090 milliseconds;
- standing up from a chair;
- standing still for 3756 milliseconds;
- walking forward seven steps;
- climbing upstairs, and after six steps, turning around;
- standing still for 2330 milliseconds;
- walking downstairs;
- walking toward to the chair six steps and then turning around;
- sitting down on the seat;
- sitting in a chair for 1850 milliseconds.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, X.; Tan, T.; Cao, G.; Porta, T.F.L. Context-Aware and Energy-Aware Video Streaming on Smartphones. IEEE Trans. Mob. Comput. 2022, 21, 862–877. [Google Scholar] [CrossRef]
- Chon, J.; Cha, H. LifeMap: A Smartphone-Based Context Provider for Location-Based Services. IEEE Pervasive Comput. 2011, 10, 58–67. [Google Scholar] [CrossRef]
- Sysoev, M.; Kos, A.; Pogačnik, M. Noninvasive Stress Recognition Considering the Current Activity. Pers. Ubiquit. Comput. 2015, 19, 1045–1052. [Google Scholar] [CrossRef] [Green Version]
- Cornacchia, M.; Ozcan, K.; Zheng, Y.; Velipasalar, S. A Survey on Activity Detection and Classification Using Wearable Sensors. IEEE Sens. J. 2017, 17, 386–403. [Google Scholar] [CrossRef]
- Khimraj, P.K.; Shukla, K.P.; Vijayvargiya, A.; Kumar, R. Human Activity Recognition Using Accelerometer and Gyroscope Data from Smartphones. In Proceedings of the International Conference on Emerging Trends in Communication, Control and Computing, Lakshmangarh, India, 21–22 February 2020. [Google Scholar]
- Testoni, A.; Di Felice, M. A Software Architecture for Generic Human Activity Recognition from Smartphone Sensor Data. In Proceedings of the IEEE International Workshop on Measurement and Networking, Naples, Italy, 27–29 September 2017. [Google Scholar]
- Vyas, R.; Doddabasappla, K. FFT Spectrum Spread with Machine Learning (ML) Analysis of Triaxial Acceleration from Shirt Pocket and Torso for Sensing Coughs While Walking. IEEE Sens. Lett. 2022, 6, 6000104. [Google Scholar] [CrossRef]
- Nguyen, H.; Lebel, K.; Bogard, S.; Goubault, E.; Boissy, P.; Duval, C. Using Inertial Sensors to Automatically Detect and Segment Activities of Daily Living in People with Parkinson’s Disease. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 197–204. [Google Scholar] [CrossRef]
- Wang, M.; Luo, C.; Ni, B.; Yuan, J.; Wang, J.; Yan, S. First-Person Daily Activity Recognition with Manipulated Object Proposals and Non-Linear Feature Fusion. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 2946–2955. [Google Scholar] [CrossRef]
- Hamdi, M.M.; Awad, M.; Abdelhameed, M.M.; Tolbah, F. Lower Limb Motion Tracking Using IMU Sensor Network. In Proceedings of the Cairo International Biomedical Engineering Conference, Giza, Egypt, 11–13 December 2014. [Google Scholar]
- Chinimilli, P.T.; Redkar, S.; Sugar, T. A Two-Dimensional Feature Space-Based Approach for Human Locomotion Recognition. IEEE Sens. J. 2019, 19, 4271–4282. [Google Scholar] [CrossRef]
- Filios, G.; Nikoletseas, S.; Pavlopoulou, C. Efficient Parameterized Methods for Physical Activity Detection Using Only Smartphone Sensors. In Proceedings of the 13th ACM International Symposium on Mobility Management and Wireless Access, Cancun, Mexico, 2–6 November 2015. [Google Scholar]
- Anjum, A.; Ilyas, M.U. Activity Recognition Using Smartphone Sensors. In Proceedings of the Consumer Communications and Networking Conference, Las Vegas, NV, USA, 11–14 January 2013. [Google Scholar]
- Belman, A.K.; Wang, L.; Iyengar, S.S.; Sniatala, P.; Wright, R.; Dora, R.; Baldwin, J.; Jin, Z.P.; Phoha, V.V. Insights from BB-MAS-A Large Dataset for Typing, Gait and Swipes of the Same Person on Desktop, Tablet and Phone. arXiv 2019, arXiv:1912.02736. [Google Scholar]
- Belman, A.K.; Wang, L.; Iyengar, S.S.; Sniatala, P.; Wright, R.; Dora, R.; Baldwin, J.; Jin, Z.P.; Phoha, V.V. SU-AIS BB-MAS (Syracuse University and Assured Information Security—Behavioral Biometrics Multi-device and multi-Activity data from Same users) Dataset. IEEE Dataport 2019. [Google Scholar] [CrossRef]
- Maurer, U.; Smailagic, A.; Siewiorek, D.P.; Deisher, M. Activity Recognition and Monitoring Using Multiple Sensors on Different Body Positions. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks, Cambridge, MA, USA, 3–5 April 2006. [Google Scholar]
- Ma, H.; Liu, H. Research on Human Motion Recognition System Based on MEMS Sensor Network. In Proceedings of the 4th Advanced Information Technology, Electronic and Automation Control Conference, Chengdu, China, 20–22 December 2019. [Google Scholar]
- Ermes, M.; Parkka, J.; Mantyjarvi, J.; Korhonen, I. Detection of Daily Activities and Sports with Wearable Sensors in Controlled and Uncontrolled Conditions. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 20–26. [Google Scholar] [CrossRef] [PubMed]
- Hussain, F.; Hussain, F.; Ehatisham-ul-Haq, M.; Azam, M.A. Activity-Aware Fall Detection and Recognition Based on Wearable Sensors. IEEE Sens. J. 2019, 19, 4528–4536. [Google Scholar] [CrossRef]
- Jain, A.; Kanhangad, V. Human Activity Classification in Smartphones Using Accelerometer and Gyroscope Sensors. IEEE Sens. J. 2018, 18, 1169–1177. [Google Scholar] [CrossRef]
- Besler, E.; Mathur, P.K.; Gay, H.C.; Passman, R.S.; Sahakian, A.V. Inter-Patient Atrial Flutter Classification Using FFT-Based Features and a Low-Variance Stacking Classifier. IEEE Trans. Biomed. Eng. 2022, 69, 156–164. [Google Scholar] [CrossRef] [PubMed]
- Wang, A.; Chen, G.; Jing, Y.; Zhao, S.; Chang, C.Y. A Comparative Study on Human Activity Recognition Using Inertial Sensors in a Smartphone. IEEE Sens. J. 2016, 16, 4566–4578. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Human Lower Limb Motion | Variety of Test Condition | Number | Percentage |
|---|---|---|---|
| Walking | Stride length: 50~90 cm | 156 | 23% |
| Going upstairs | Step height: 17 cm, 20 cm | 122 | 18% |
| Going downstairs | Step height: 17 cm, 20 cm | 113 | 17% |
| Standing up | Seat height: 32 cm, 42 cm, 48 cm | 139 | 21% |
| Sitting down | Seat height: 32 cm, 42 cm, 48 cm | 140 | 21% |
| Classifier | Accuracy | Limb Motion | TPR | FPR | Precision | Recall |
|---|---|---|---|---|---|---|
| NB (n = 6) | 97.01% | Standing up | 97.75% | 0.19% | 99.23% | 97.75% |
| Sitting down | 100% | 0% | 100% | 100% | ||
| Walking | 93.00% | 0.57% | 97.91% | 93.00% | ||
| Going upstairs | 96.86% | 1.29% | 94.42% | 96.86% | ||
| Going downstairs | 98.44% | 1.64% | 92.85% | 98.44% | ||
| Average | 97.21% | 0.74% | 96.88% | 97.21% | ||
| KNN (n = 6, K = 1) | 96.12% | Standing up | 97.64% | 0.19% | 99.33% | 97.64% |
| Sitting down | 100% | 0% | 100% | 100% | ||
| Walking | 94.43% | 1.77% | 94.24% | 94.43% | ||
| Going upstairs | 93.79% | 2.68% | 87.67% | 93.79% | ||
| Going downstairs | 93.37% | 0.16% | 98.57% | 93.37% | ||
| Average | 95.85% | 0.96% | 95.96% | 95.85% | ||
| ANNs (n = 6, numHLN = 8) | 98.21% | Standing up | 99.41% | 0.21% | 99.50% | 99.41% |
| Sitting down | 100% | 0.19% | 99.29% | 100% | ||
| Walking | 99.41% | 0.98% | 96.86% | 99.41% | ||
| Going upstairs | 97.98% | 0.71% | 96.42% | 97.98% | ||
| Going downstairs | 93.34% | 0.18% | 99.00% | 93.34% | ||
| Average | 98.03% | 0.45% | 98.21% | 98.03% |
| Actual | NB Predicted Results | KNN Predicted Results | ANN Predicted Results | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | L5 | L1 | L2 | L3 | L4 | L5 | L1 | L2 | L3 | L4 | L5 | |
| L1 | 136 | 0 | 0 | 1 | 2 | 136 | 0 | 1 | 2 | 0 | 138 | 0 | 0 | 1 | 0 |
| L2 | 0 | 140 | 0 | 0 | 0 | 0 | 140 | 0 | 0 | 0 | 0 | 140 | 0 | 0 | 0 |
| L3 | 0 | 0 | 145 | 4 | 7 | 0 | 0 | 147 | 9 | 0 | 0 | 0 | 155 | 0 | 1 |
| L4 | 1 | 0 | 3 | 118 | 0 | 1 | 0 | 5 | 115 | 1 | 2 | 0 | 0 | 120 | 0 |
| L5 | 0 | 0 | 0 | 2 | 111 | 0 | 0 | 3 | 4 | 106 | 0 | 0 | 5 | 3 | 105 |
| Classifier | Accuracy | Limb Motion | TPR | FPR | Precision | Recall |
|---|---|---|---|---|---|---|
| NB (n = 6) | 88.40% | Walking | 100.00% | 0.33% | 99.78% | 100.00% |
| Going upstairs | 82.76% | 9.87% | 72.58% | 82.28% | ||
| Going downstairs | 67.57% | 5.25% | 81.51% | 67.57% | ||
| Average | 83.44% | 5.15% | 84.62% | 83.44% | ||
| KNN (n = 6, K = 1) | 96.80% | Walking | 100.00% | 0.28% | 99.75% | 100.00% |
| Going upstairs | 93.91% | 2.27% | 92.66% | 93.91% | ||
| Going downstairs | 92.43% | 1.68% | 93.46% | 92.43% | ||
| Average | 95.44% | 1.41% | 95.29% | 95.44% | ||
| ANNs (n = 32, numHLN = 64) | 97.20% | Walking | 100.00% | 0.00% | 100.00% | 100.00% |
| Going upstairs | 94.52% | 1.76% | 94.43% | 94.52% | ||
| Going downstairs | 93.75% | 1.86% | 93.24% | 93.75% | ||
| Average | 96.09% | 1.21% | 95.89% | 96.09% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, L.-T.; Lawo, M.; Wang, Z.-G.; Wang, H.-Y. Human Lower Limb Motion Capture and Recognition Based on Smartphones. Sensors 2022, 22, 5273. https://doi.org/10.3390/s22145273
Duan L-T, Lawo M, Wang Z-G, Wang H-Y. Human Lower Limb Motion Capture and Recognition Based on Smartphones. Sensors. 2022; 22(14):5273. https://doi.org/10.3390/s22145273
Chicago/Turabian StyleDuan, Lin-Tao, Michael Lawo, Zhi-Guo Wang, and Hai-Ying Wang. 2022. "Human Lower Limb Motion Capture and Recognition Based on Smartphones" Sensors 22, no. 14: 5273. https://doi.org/10.3390/s22145273