
A Wireless Underground Sensor Network Field Pilot for Agriculture and Ecology: Soil Moisture Mapping Using Signal Attenuation

Abstract
:1. Introduction
1.1. Related Work
1.2. Contribution of This Work
2. Materials and Methods
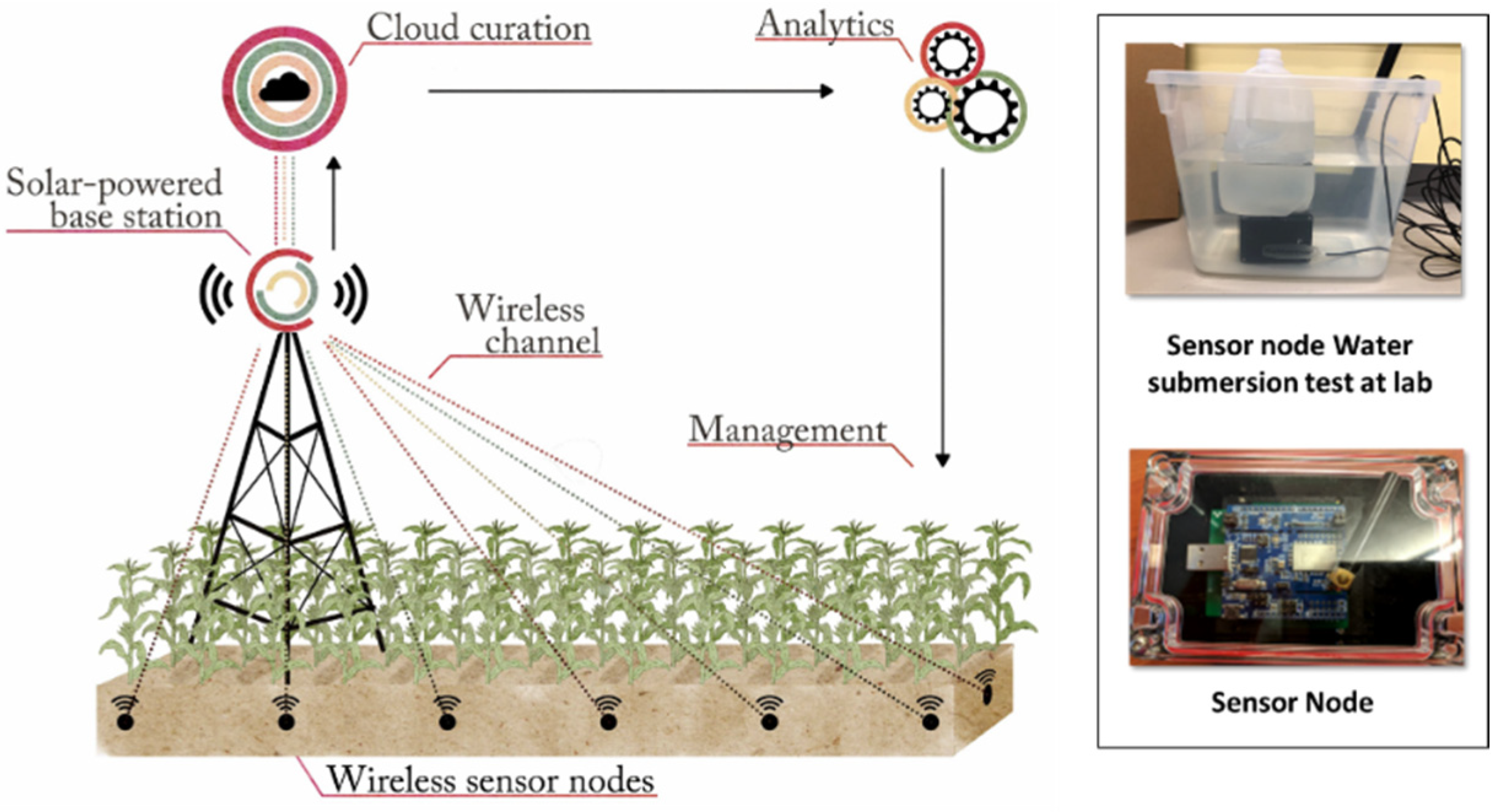
2.1. Sensor Node Development
2.2. Experimental Setup
3. Results
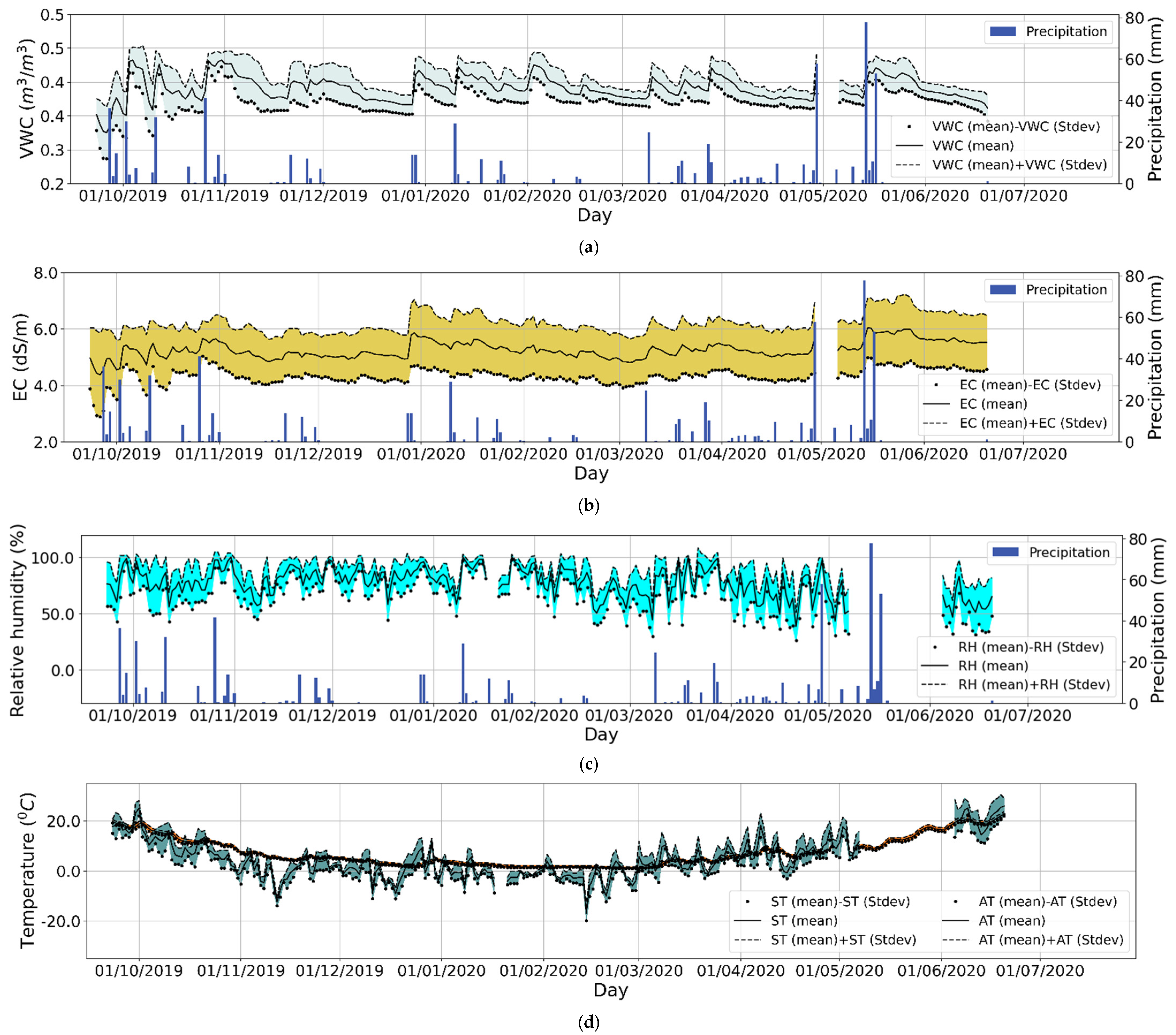
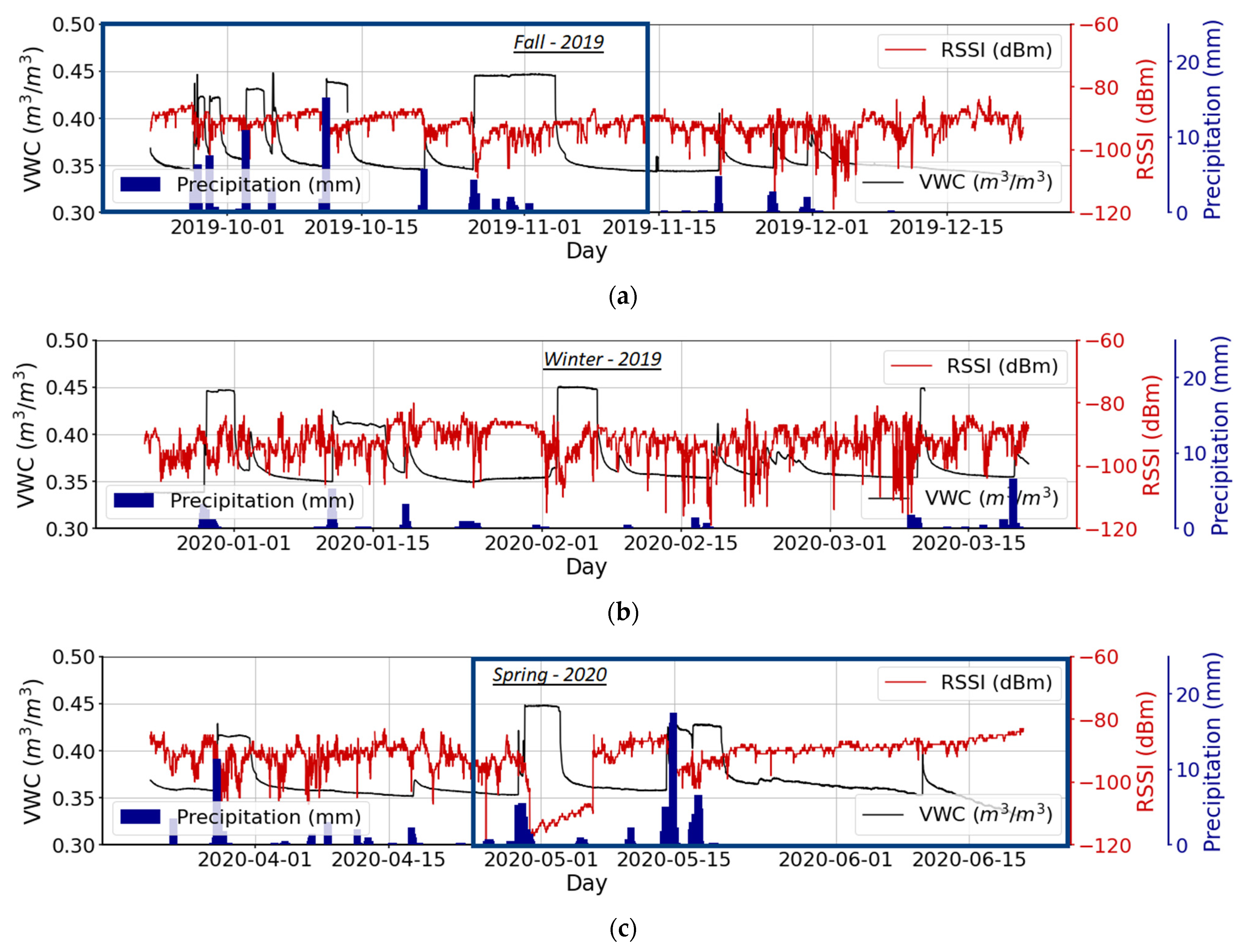
3.1. Temporal Variation of Soil Properties
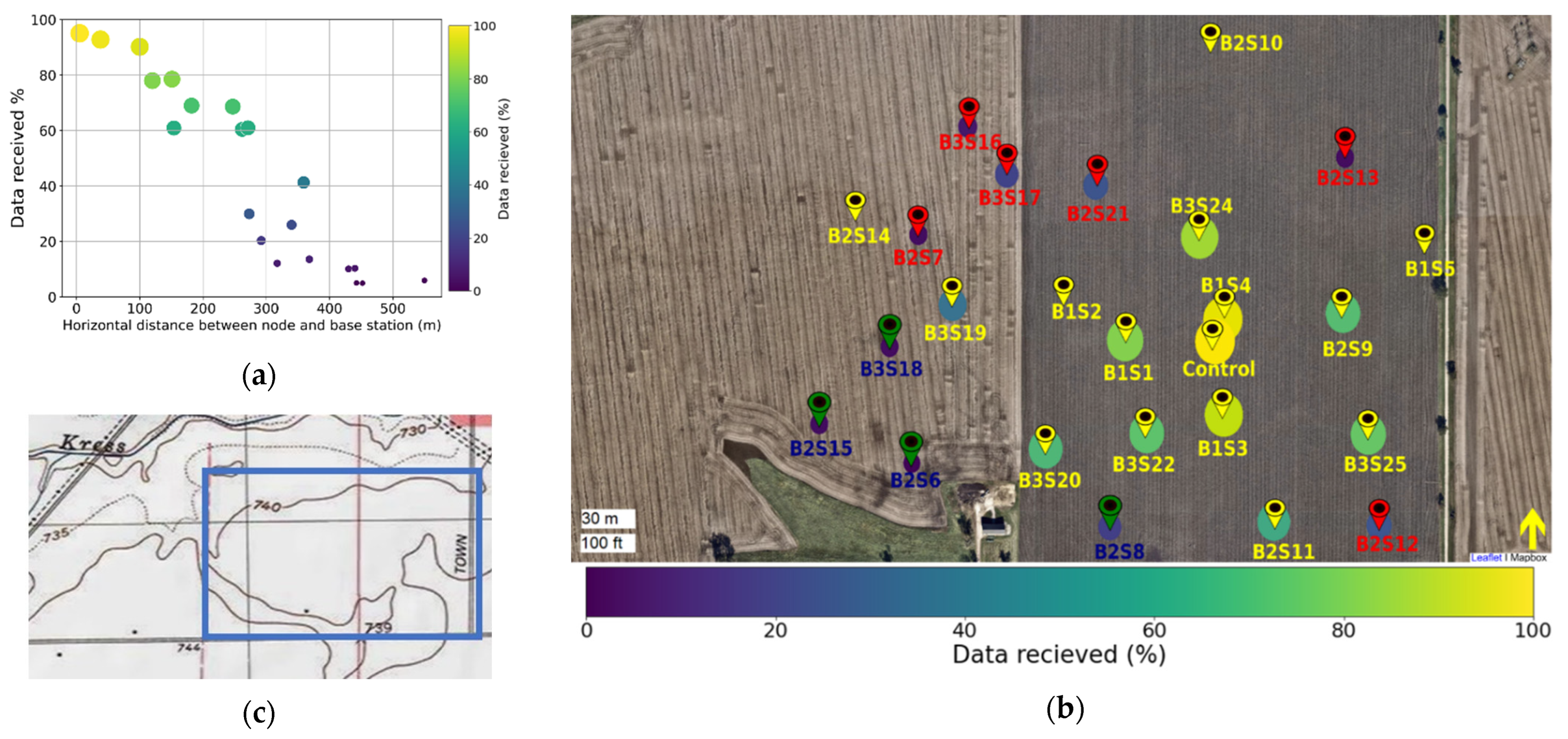
3.2. System Performance
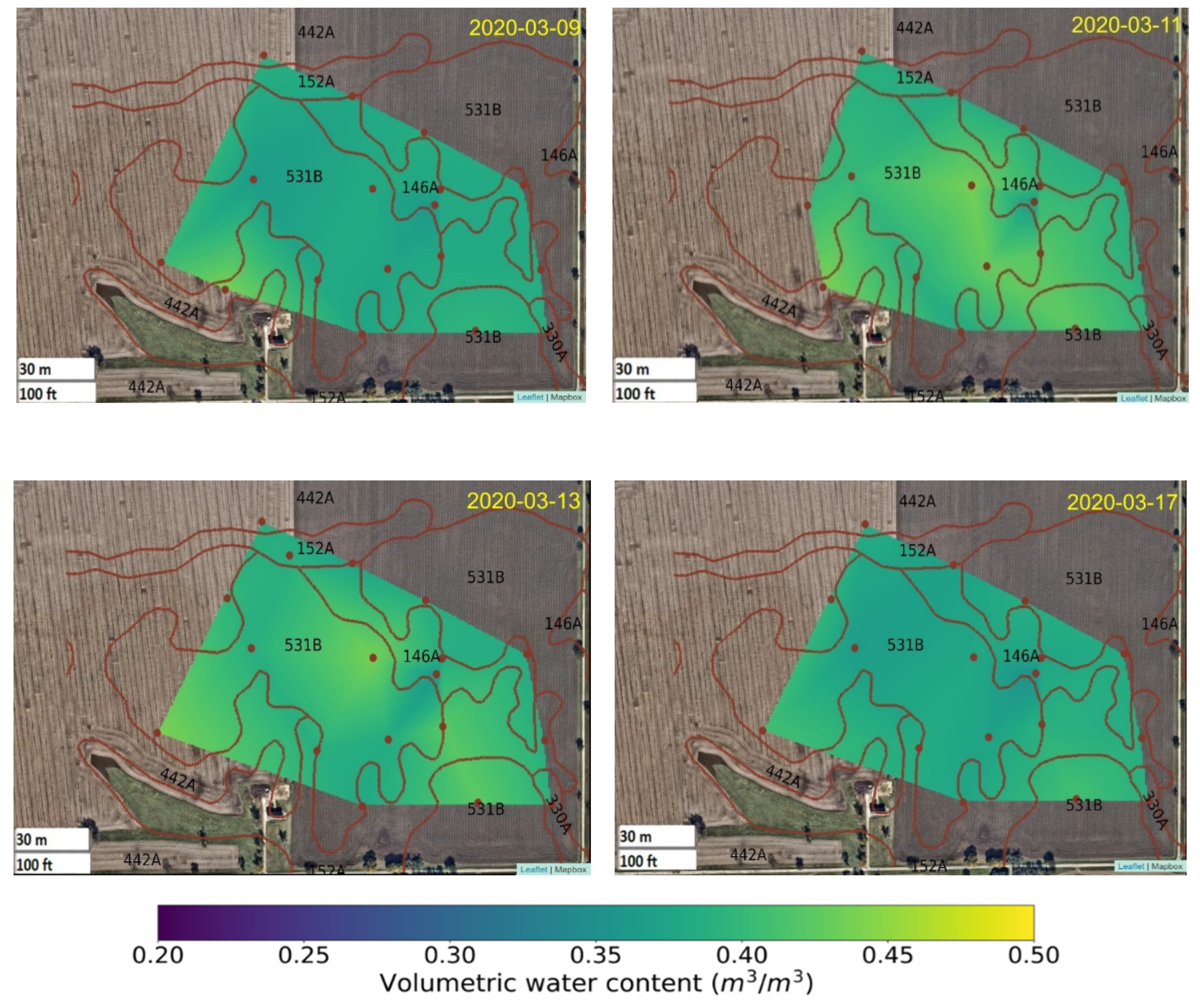
3.3. Spatial Variation of Volumetric Water Content Before, During, and after a Precipitation Event
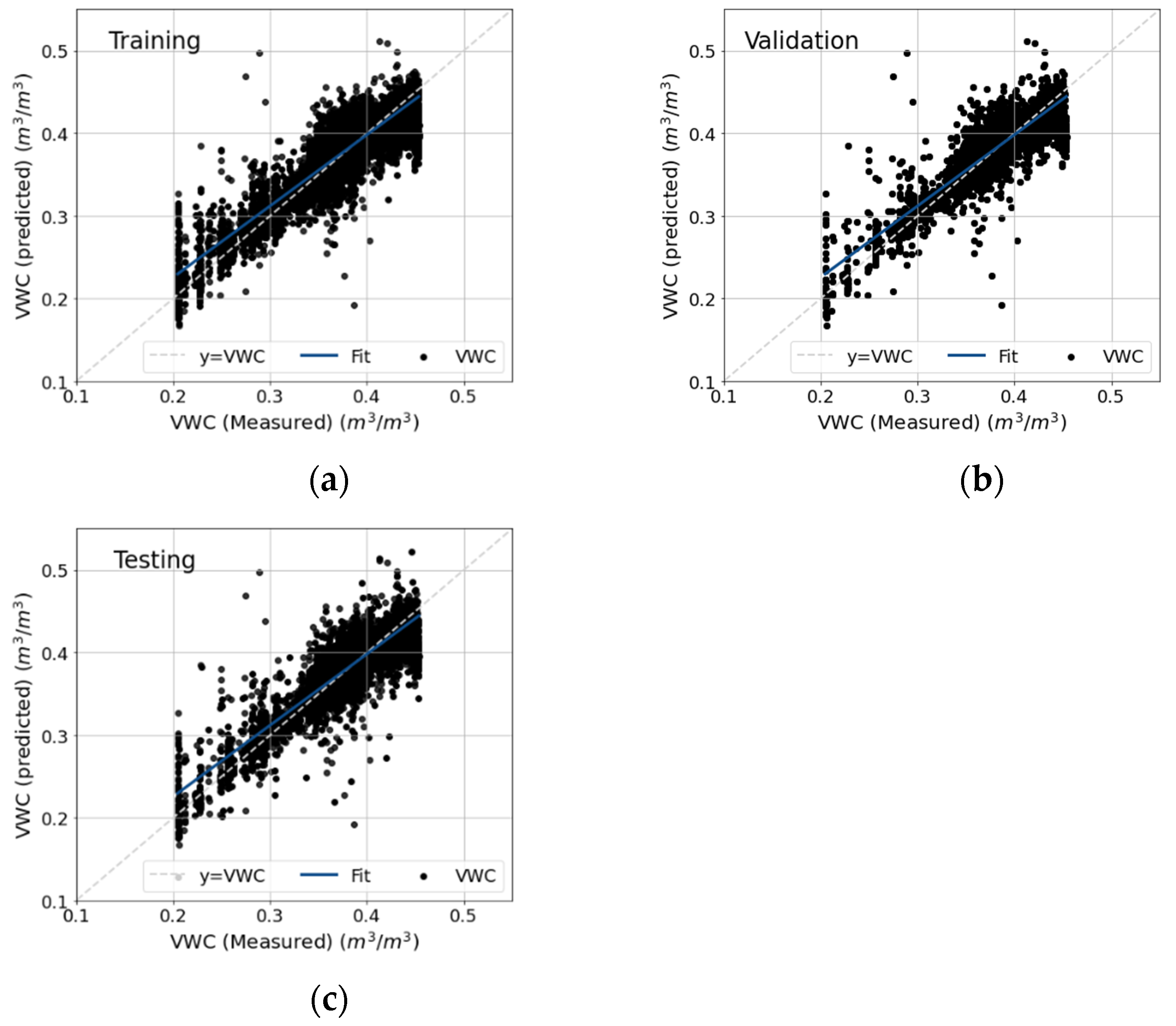
3.4. Estimation of VWC from Received Signal Strength Indicator (RSSI)
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.No | Model Architecture | Training | Testing | Validation | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R | R2 | RMSE (m3/m3) | MAE (m3/m3) | R | R2 | RMSE (m3/m3) | MAE | R | R2 | RMSE (m3/m3) | MAE (m3/m3) | ||
| 1 | 6-5-1 | 0.605 | 0.367 | 0.024 | 0.017 | 0.604 | 0.365 | 0.024 | 0.017 | 0.594 | 0.353 | 0.024 | 0.017 |
| 2 | 6-10-1 | 0.669 | 0.448 | 0.022 | 0.016 | 0.680 | 0.462 | 0.022 | 0.016 | 0.664 | 0.441 | 0.022 | 0.016 |
| 3 | 6-15-1 | 0.686 | 0.471 | 0.022 | 0.015 | 0.697 | 0.485 | 0.022 | 0.015 | 0.683 | 0.467 | 0.022 | 0.015 |
| 4 | 6-20-1 | 0.733 | 0.537 | 0.020 | 0.014 | 0.720 | 0.519 | 0.020 | 0.014 | 0.722 | 0.521 | 0.021 | 0.015 |
| 5 | 6-25-1 | 0.737 | 0.543 | 0.020 | 0.014 | 0.723 | 0.522 | 0.020 | 0.014 | 0.730 | 0.532 | 0.020 | 0.014 |
| 6 | 6-30-1 | 0.739 | 0.546 | 0.020 | 0.014 | 0.738 | 0.545 | 0.020 | 0.014 | 0.746 | 0.556 | 0.020 | 0.014 |
| 7 | 6-35-1 | 0.732 | 0.535 | 0.020 | 0.014 | 0.714 | 0.510 | 0.021 | 0.014 | 0.714 | 0.508 | 0.020 | 0.014 |
| 8 | 6-40-1 | 0.756 | 0.572 | 0.019 | 0.014 | 0.758 | 0.575 | 0.019 | 0.014 | 0.758 | 0.574 | 0.020 | 0.014 |
| 9 | 6-45-1 | 0.789 | 0.622 | 0.018 | 0.013 | 0.777 | 0.603 | 0.019 | 0.013 | 0.774 | 0.599 | 0.019 | 0.013 |
| 10 | 6-50-1 | 0.792 | 0.628 | 0.018 | 0.013 | 0.781 | 0.610 | 0.019 | 0.013 | 0.784 | 0.614 | 0.018 | 0.013 |
| 11 | 6-55-1 | 0.786 | 0.618 | 0.018 | 0.013 | 0.776 | 0.603 | 0.019 | 0.013 | 0.773 | 0.598 | 0.019 | 0.013 |
| 12 | 6-60-1 | 0.794 | 0.630 | 0.018 | 0.013 | 0.785 | 0.617 | 0.019 | 0.013 | 0.781 | 0.610 | 0.019 | 0.013 |
| 13 | 6-65-1 | 0.789 | 0.623 | 0.018 | 0.013 | 0.781 | 0.610 | 0.018 | 0.013 | 0.784 | 0.614 | 0.018 | 0.013 |
| 14 | 6-70-1 | 0.802 | 0.643 | 0.018 | 0.013 | 0.787 | 0.619 | 0.018 | 0.013 | 0.769 | 0.590 | 0.019 | 0.013 |
| 21 | 6-5-5-1 | 0.613 | 0.376 | 0.024 | 0.017 | 0.611 | 0.374 | 0.023 | 0.016 | 0.608 | 0.370 | 0.024 | 0.017 |
| 22 | 6-10-10-1 | 0.766 | 0.586 | 0.019 | 0.014 | 0.752 | 0.566 | 0.019 | 0.014 | 0.771 | 0.594 | 0.019 | 0.013 |
| 23 | 6-15-15-1 | 0.817 | 0.668 | 0.017 | 0.012 | 0.809 | 0.654 | 0.018 | 0.012 | 0.805 | 0.648 | 0.017 | 0.012 |
| 24 | 6-20-20-1 | 0.841 | 0.708 | 0.016 | 0.011 | 0.825 | 0.681 | 0.017 | 0.011 | 0.835 | 0.698 | 0.017 | 0.011 |
| 25 | 6-25-25-1 | 0.867 | 0.751 | 0.015 | 0.010 | 0.848 | 0.718 | 0.016 | 0.011 | 0.852 | 0.726 | 0.015 | 0.010 |
| 26 | 6-30-30-1 | 0.875 | 0.765 | 0.014 | 0.010 | 0.859 | 0.737 | 0.015 | 0.010 | 0.870 | 0.757 | 0.015 | 0.010 |
| 27 | 6-35-35-1 | 0.888 | 0.788 | 0.014 | 0.009 | 0.880 | 0.775 | 0.014 | 0.010 | 0.877 | 0.768 | 0.014 | 0.010 |
| 28 | 6-40-40-1 | 0.857 | 0.734 | 0.015 | 0.010 | 0.843 | 0.710 | 0.016 | 0.011 | 0.837 | 0.699 | 0.016 | 0.011 |
| 29 | 6-45-45-1 | 0.909 | 0.827 | 0.012 | 0.008 | 0.882 | 0.778 | 0.014 | 0.009 | 0.891 | 0.794 | 0.014 | 0.009 |
| 30 | 6-50-50-1 | 0.887 | 0.786 | 0.014 | 0.009 | 0.861 | 0.740 | 0.015 | 0.010 | 0.863 | 0.744 | 0.015 | 0.010 |
| 31 | 6-55-55-1 | 0.883 | 0.780 | 0.014 | 0.009 | 0.847 | 0.714 | 0.016 | 0.010 | 0.849 | 0.718 | 0.016 | 0.010 |
| 32 | 6-60-60-1 | 0.904 | 0.817 | 0.013 | 0.008 | 0.871 | 0.758 | 0.015 | 0.009 | 0.872 | 0.758 | 0.015 | 0.009 |
| 33 | 6-65-65-1 | 0.934 | 0.872 | 0.011 | 0.007 | 0.886 | 0.779 | 0.014 | 0.008 | 0.892 | 0.794 | 0.013 | 0.008 |
| 34 | 6-70-70-1 | 0.916 | 0.838 | 0.012 | 0.008 | 0.872 | 0.758 | 0.015 | 0.009 | 0.875 | 0.762 | 0.014 | 0.009 |
| 35 | 6-5-5-5-1 | 0.718 | 0.516 | 0.021 | 0.015 | 0.707 | 0.499 | 0.021 | 0.015 | 0.707 | 0.499 | 0.021 | 0.015 |
| 36 | 6-10-10-10-1 | 0.828 | 0.686 | 0.017 | 0.011 | 0.817 | 0.667 | 0.017 | 0.012 | 0.822 | 0.676 | 0.017 | 0.012 |
| 37 | 6-15-15-15-1 | 0.850 | 0.723 | 0.016 | 0.011 | 0.826 | 0.682 | 0.017 | 0.011 | 0.835 | 0.697 | 0.016 | 0.011 |
| 38 | 6-20-20-20-1 | 0.883 | 0.781 | 0.014 | 0.009 | 0.867 | 0.752 | 0.015 | 0.010 | 0.867 | 0.751 | 0.015 | 0.010 |
| 39 | 6-25-25-25-1 | 0.898 | 0.806 | 0.013 | 0.009 | 0.875 | 0.765 | 0.014 | 0.009 | 0.881 | 0.776 | 0.014 | 0.009 |
| 40 | 6-30-30-30-1 | 0.910 | 0.828 | 0.012 | 0.008 | 0.883 | 0.780 | 0.014 | 0.009 | 0.891 | 0.794 | 0.014 | 0.009 |
| 41 | 6-35-35-35-1 | 0.908 | 0.825 | 0.012 | 0.008 | 0.879 | 0.770 | 0.014 | 0.009 | 0.885 | 0.782 | 0.014 | 0.009 |
| 42 | 6-40-40-40-1 | 0.917 | 0.840 | 0.012 | 0.008 | 0.890 | 0.791 | 0.014 | 0.009 | 0.883 | 0.778 | 0.014 | 0.009 |
| 43 | 6-45-45-45-1 | 0.934 | 0.872 | 0.011 | 0.007 | 0.898 | 0.805 | 0.013 | 0.008 | 0.897 | 0.803 | 0.013 | 0.008 |
| 44 | 6-50-50-50-1 | 0.918 | 0.842 | 0.012 | 0.008 | 0.883 | 0.778 | 0.014 | 0.009 | 0.896 | 0.802 | 0.013 | 0.009 |
| 45 | 6-55-55-55-1 | 0.958 | 0.917 | 0.01 | 0.006 | 0.904 | 0.812 | 0.013 | 0.007 | 0.899 | 0.809 | 0.012 | 0.007 |
| 46 | 6-60-60-601 | 0.926 | 0.858 | 0.011 | 0.007 | 0.884 | 0.777 | 0.014 | 0.009 | 0.893 | 0.795 | 0.014 | 0.008 |
| 47 | 6-65-65-65-1 | 0.916 | 0.839 | 0.012 | 0.008 | 0.887 | 0.786 | 0.014 | 0.009 | 0.886 | 0.784 | 0.014 | 0.009 |
| 48 | 6-70-70-70-1 | 0.915 | 0.838 | 0.012 | 0.008 | 0.882 | 0.776 | 0.014 | 0.009 | 0.882 | 0.776 | 0.014 | 0.009 |
Appendix B
References
- Akyildiz, I.F.; Sun, Z.; Vuran, M.C. Signal propagation techniques for wireless underground communication networks. Phys. Commun. 2009, 2, 167–183. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Stuntebeck, E.P. Wireless underground sensor networks: Research challenges. Ad Hoc Netw. 2006, 4, 669–686. [Google Scholar] [CrossRef]
- Cardell-Oliver, R.; Kranz, M.; Smettem, K.; Mayer, K. A Reactive Soil Moisture Sensor Network: Design and Field Evaluation. Int. J. Distrib. Sens. Netw. 2005, 1, 149–162. [Google Scholar] [CrossRef]
- Dong, X.; Vuran, M.C. A Channel Model for Wireless Underground Sensor Networks Using Lateral Waves. In Proceedings of the 2011 IEEE Global Telecommunications Conference—GLOBECOM, Houston, TX, USA, 5–9 December 2011; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Dong, X.; Vuran, M.C. Impacts of Soil Moisture on Cognitive Radio Underground Networks. In Proceedings of the First International Black Sea Conference on Communications and Networking (BlackSeaCom), Batumi, Georgia, 3–5 July 2013; pp. 222–227. [Google Scholar] [CrossRef] [Green Version]
- Elleithy, A.; Liu, G.; Elrashidi, A. Underground Wireless Sensor Network Communication Using Electromagnetic Waves Resonates at 2.5 GHz. J. Wirel. Netw. Commun. 2013, 2, 158–167. [Google Scholar] [CrossRef]
- Salam, A.; Vuran, M.C.; Irmak, S. Pulses in the Sand: Impulse Response Analysis of Wireless Underground Channel. In Proceedings of the IEEE INFOCOM 2016—The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Vuran, M.C.; Akyildiz, I.F. Characteristics of Underground Channel for Wireless Underground Sensor Networks. In Proceedings of the Sixth Annual Mediterranean Ad Hoc Networking WorkShop, Corfu, Greece, 12–15 June 2007; pp. 92–99. Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.221.5310&rep=rep1&type=pdf (accessed on 20 June 2020).
- Vuran, M.C.; Salam, A.; Wong, R.; Irmak, S. Internet of underground things: Sensing and communications on the field for precision agriculture. In Proceedings of the 2018 IEEE 4th World Forum Internet Things (WF-IoT), Singapore, 5–8 February 2018; pp. 586–591. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Andreyev, A.; Zumpf, C.; Negri, M.C.; Guha, S.; Ghosh, M. Thoreau: A Fully-Buried Wireless Underground Sensor Network in an Urban Environment. In Proceedings of the 2019 11th International Conference on Communication Systems & Networks (COMSNETS), Bengaluru, India, 7–11 January 2019; pp. 239–250. [Google Scholar] [CrossRef]
- Zhang, X.; Andreyev, A.; Zumpf, C.; Negri, M.C.; Guha, S.; Ghosh, M. Thoreau: A Subterranean Wireless Sensing Network for Agriculture and the Environment. In Proceedings of the 2017 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Atlanta, GA, USA, 1–4 May 2017; pp. 78–84. [Google Scholar] [CrossRef]
- Hardie, M.; Hoyle, D. Underground Wireless Data Transmission Using 433-MHz LoRa for Agriculture. Sensors 2019, 19, 4232. [Google Scholar] [CrossRef] [Green Version]
- Akkaş, M.A.; Sokullu, R. Wireless Underground Sensor Networks: Channel Modeling and Operation Analysis in the Terahertz Band. Int. J. Antennas Propag. 2015, 2015, 780235. [Google Scholar] [CrossRef] [Green Version]
- Dong, X.; Vuran, M.C.; Irmak, S. Autonomous precision agriculture through integration of wireless underground sensor networks with center pivot irrigation systems. Ad Hoc Netw. 2013, 11, 1975–1987. [Google Scholar] [CrossRef]
- Silva, A.R.; Vuran, M.C. Empirical Evaluation of Wireless Underground-to-Underground Communication in Wireless Underground Sensor Networks. In Distributed Computing in Sensor Systems; Krishnamachari, B., Suri, S., Heinzelman, W., Mitra, U., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 231–244. Available online: https://cse.unl.edu/~cpn/system/files/Silva09WUUC.pdf (accessed on 15 September 2020).
- Stuntebeck, E.P.; Pompili, D.; Melodia, T. Wireless Underground Sensor Networks Using Commodity Terrestrial Motes. In Proceedings of the 2006 2nd IEEE Workshop on Wireless Mesh Networks, Reston, VA, USA, 28 September 2006; pp. 112–114. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Zhang, Z.; Han, W. Experiment Measurements of RSSI for Wireless Underground Sensor Network in Soil. IAENG Int. J. Comput. Sci. 2018, 45, 237–245. Available online: https://www.iaeng.org/IJCS/issues_v45/issue_2/IJCS_45_2_02.pdf (accessed on 20 December 2020).
- Mekonnen, Y.; Namuduri, S.; Burton, L.; Sarwat, A.; Bhansali, S. Review—Machine Learning Techniques in Wireless Sensor Network Based Precision Agriculture. J. Electrochem. Soc. 2020, 167, 037522. [Google Scholar] [CrossRef]
- Klein, L.J.; Hamann, H.F.; Hinds, N.; Guha, S.; Sanchez, L.; Sams, B.; Dokoozlian, N. Closed Loop Controlled Precision Irrigation Sensor Network. IEEE Internet Things J. 2018, 5, 4580–4588. [Google Scholar] [CrossRef]
- Chlingaryan, A.; Sukkarieh, S.; Whelan, B. Machine learning approaches for crop yield prediction and nitrogen status estimation in precision agriculture: A review. Comput. Electron. Agric. 2018, 151, 61–69. [Google Scholar] [CrossRef]
- Srivastava, P.K.; Han, D.; Ramirez, M.R.; Islam, T. Machine Learning Techniques for Downscaling SMOS Satellite Soil Moisture Using MODIS Land Surface Temperature for Hydrological Application. Water Resour. Manag. 2013, 27, 3127–3144. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, P.; Han, W.; Yu, X. Design of wireless underground sensor network nodes for field information acquisition. Afr. J. Agric. Res. 2012, 7, 82–88. [Google Scholar] [CrossRef] [Green Version]
- Rossato, L.; Alvalá, R.C.; Marengo, J.A.; Zeri, M.; Cunha, A.P.; Pires, L.; Barbosa, H.A. Impact of Soil Moisture on Crop Yields over Brazilian Semiarid. Front. Environ. Sci. 2017, 5, 73. [Google Scholar] [CrossRef] [Green Version]
- Katerji, N.; van Hoorn, J.W.; Hamdy, A.; Mastrorilli, M. Salinity effect on crop development and yield, analysis of salt tolerance according to several classification methods. Agric. Water Manag. 2003, 62, 37–66. [Google Scholar] [CrossRef]
- Fontanet, M.; Fernàndez-Garcia, D.; Ferrer, F. The value of satellite remote sensing soil moisture data and the DISPATCH algorithm in irrigation fields. Hydrol. Earth Syst. Sci. 2018, 22, 5889–5900. [Google Scholar] [CrossRef] [Green Version]
- Vuran, M.C.; Silva, A.R. Communication Through Soil in Wireless Underground Sensor Networks—Theory and Practice. In Sensor Networks. Signals and Communication Technology; Ferrari, G., Ed.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 309–347. [Google Scholar] [CrossRef]
- Sun, Z.; Akyildiz, I.F. Connectivity in Wireless Underground Sensor Networks. In Proceedings of the 2010 7th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Boston, MA, USA, 21–25 June 2010; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Trang, H.T.H.; Dung, L.T.; Hwang, S.O. Connectivity analysis of underground sensors in wireless underground sensor networks. Ad Hoc Netw. 2018, 71, 104–116. [Google Scholar] [CrossRef]
- Banaseka, F.K.; Franklin, H.; Katsriku, F.A.; Abdulai, J.D.; Ekpezu, A.; Wiafe, I. Soil Medium Electromagnetic Scattering Model for the Study of Wireless Underground Sensor Networks. Wirel. Commun. Mob. Comput. 2021, 2021, 8842508. [Google Scholar] [CrossRef]
- Banaseka, F.K.; Katsriku, F.; Abdulai, J.D.; Adu-Manu, K.S.; Engmann, F.N.A. Signal Propagation Models in Soil Medium for the Study of Wireless Underground Sensor Networks: A Review of Current Trends. Wirel. Commun. Mob. Comput. 2021, 2021, 8836426. [Google Scholar] [CrossRef]
- Huang, H.; Shi, J.; Wang, F.; Zhang, D.; Zhang, D. Theoretical and Experimental Studies on the Signal Propagation in Soil for Wireless Underground Sensor Networks. Sensors 2020, 20, 2580. [Google Scholar] [CrossRef]
- Wohwe Sambo, D.; Forster, A.; Yenke, B.O.; Sarr, I.; Gueye, B.; Dayang, P. Wireless Underground Sensor Networks Path Loss Model for Precision Agriculture (WUSN-PLM). IEEE Sens. J. 2020, 20, 5298–5313. [Google Scholar] [CrossRef]
- Dujić Rodić, L.; Županović, T.; Perković, T.; Šolić, P.; Rodrigues, J.J.P.C. Machine Learning and Soil Humidity Sensing: Signal Strength Approach. ACM Trans. Internet Technol. 2022, 22, 1–21. [Google Scholar] [CrossRef]
- Ayedi, M.; Eldesouky, E.; Nazeer, J. Energy-Spectral Efficiency Optimization in Wireless Underground Sensor Networks Using Salp Swarm Algorithm. J. Sensors 2021, 2021, 6683988. [Google Scholar] [CrossRef]
- Lin, K.; Hao, T. Adaptive Selection of Transmission Configuration for LoRa-based Wireless Underground Sensor Networks. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Meier, H.; Rosenbaum, U.; Weuthen, A. Hybrid Wireless Underground Sensor Networks: Quantification of Signal Attenuation in Soil. Vadose Zone J. 2009, 8, 755–761. [Google Scholar] [CrossRef]
- Tooker, J.; Dong, X.; Vuran, M.C.; Irmak, S. Connecting Soil to the Cloud: A Wireless Underground Sensor Network Testbed. In Proceedings of the 2012 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; Volume 1, pp. 79–81. [Google Scholar] [CrossRef] [Green Version]
- Ding, J.; Chandra, R. Estimating Soil Moisture and Electrical Conductivity Using Wi-Fi. Available online: https://www.microsoft.com/en-us/research/publication/estimating-soil-moisture-and-electrical-conductivity-using-wi-fi/ (accessed on 18 August 2020).
- Elesina, V.V.; Kuznetsov, A.G.; Chukov, G.V.; Elesin, V.V.; Usachev, N.A. A Practical Approach to Underground UHF Channel Characterization. In Proceedings of the 2021 International Siberian Conference on Control and Communications (SIBCON), Kazan, Russia, 13–15 May 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Rajadurai, P.; Kathrine, G.J.W. An Intelligent Deep Learning-Based Wireless Underground Sensor System for IoT-Based Agricultural Application. In Applied Learning Algorithms for Intelligent IoT; Auerbach Publications: Boca Raton, FL, USA, 2021; pp. 291–324. [Google Scholar] [CrossRef]
- Monteiro, A.F.; Da, F.; Henriques, R.; Beatriz, A.; Pinho, C.; Monteiro, A.; Henriques, F. A System For Landslides Monitoring Using Wireless Underground Sensor Networks and Cloud Computing. An. Do XII Comput. Beach-COTB ’21 2021, 12, 504–506. [Google Scholar] [CrossRef]
- Hernandez, S.M.; Bulut, E. Towards Dense and Scalable Soil Sensing Through Low-Cost WiFi Sensing Networks. In Proceedings of the 2021 IEEE 46th Conference on Local Computer Networks (LCN), Edmonton, AB, Canada, 4–7 October 2021; pp. 549–556. [Google Scholar] [CrossRef]
- Zaman, I.; Gellhaar, M.; Dede, J.; Koehler, H.; Foerster, A. Demo: Design and Evaluation of MoleNet for Wireless Underground Sensor Networks. In Proceedings of the 2016 IEEE 41st Conference on Local Computer Networks Workshops (LCN Workshops), Dubai, United Arab Emirates, 7–10 November 2016; pp. 145–147. [Google Scholar] [CrossRef]
- Liedmann, F.; Wietfeld, C. SoMoS—A Multidimensional Radio Field Based Soil Moisture Sensing System. In Proceedings of the 2017 IEEE SENSORS, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Liedmann, F.; Holewa, C.; Wietfeld, C. The Radio Field as a Sensor—A Segmentation Based Soil Moisture Sensing Approach. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Korea, 12–14 March 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Wan, X.F.; Yang, Y.; Cui, J.; Sardar, M.S. Lora Propagation Testing in Soil for Wireless Underground Sensor Networks. In Proceedings of the 2017 IEEE 6th Asia-Pacific Conference on Antennas Propagation, APCAP, Xi’an, China, 16–19 October 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Wu, S.; Austin, A.C.M.; Ivoghlian, A.; Bisht, A.; Wang, K.I.-K. Long range wide area network for agricultural wireless underground sensor networks. J. Ambient Intell. Humaniz. Comput. 2020, 2020, 1–17. [Google Scholar] [CrossRef]
- Yu, X.; Wu, P.; Han, W.; Zhang, Z. A survey on wireless sensor network infrastructure for agriculture. Comput. Stand. Interfaces 2013, 35, 59–64. [Google Scholar] [CrossRef]
- Yu, X.; Han, W.; Zhang, Z. Path Loss Estimation for Wireless Underground Sensor Network in Agricultural Application. Agric. Res. 2016, 6, 97–102. [Google Scholar] [CrossRef]
- Levintal, E.; Ganot, Y.; Taylor, G.; Freer-Smith, P.; Suvocarev, K.; Dahlke, H.E. An underground, wireless, open-source, low-cost system for monitoring oxygen, temperature, and soil moisture. Soil 2022, 8, 85–87. [Google Scholar] [CrossRef]
- Smith, P.; Ashmore, M.R.; Black, H.I.J.; Burgess, P.J.; Evans, C.D.; Quine, T.A.; Thomson, A.M.; Hicks, K.; Orr, H.G. REVIEW: The role of ecosystems and their management in regulating climate, and soil, water and air quality. J. Appl. Ecol. 2013, 50, 812–829. [Google Scholar] [CrossRef]
- Adamchuk, V.I.; Hummel, J.W.; Morgan, M.T.; Upadhyaya, S.K. On-the-go soil sensors for precision agriculture. Comput. Electron. Agric. 2004, 44, 71–91. [Google Scholar] [CrossRef] [Green Version]
- Schlesinger, W.H.; Jasechko, S. Transpiration in the global water cycle. Agric. For. Meteorol. 2014, 189–190, 115–117. [Google Scholar] [CrossRef]
- Li, X.; Huo, Z.; Xu, B. Optimal allocation method of irrigationwater from river and lake by considering the fieldwater cycle process. Water 2017, 9, 911. [Google Scholar] [CrossRef] [Green Version]
- Leng, G.; Leung, L.R.; Huang, M. Irrigation impacts on the water cycle and regional climate simulated by the ACME Model. AGUFM 2016, 2016, GC31B-1122. [Google Scholar]
- Aghakouchak, A. A baseline probabilistic drought forecasting framework using standardized soil moisture index: Application to the 2012 United States drought. Hydrol. Earth Syst. Sci. 2014, 18, 2485–2492. [Google Scholar] [CrossRef] [Green Version]
- Teillet, P.M.; Gauthier, R.P.; Pultz, T.J.; Deschamps, A.; Fedosejevs, G.; Maloley, M.; Ainsley, G.; Chichagov, A. A soil moisture sensorweb for use in flood forecasting applications. Remote Sens. Agric. Ecosyst. Hydrol. V 2004, 5232, 467–478. [Google Scholar] [CrossRef]
- Cai, Y.; Zheng, W.; Zhang, X.; Zhangzhong, L.; Xue, X. Research on soil moisture prediction model based on deep learning. PLoS ONE 2019, 14, e0214508. [Google Scholar] [CrossRef]
- Gill, M.K.; Asefa, T.; Kemblowski, M.W.; McKee, M. Soil Moisture Prediction Using Support Vector Machines. JAWRA J. Am. Water Resour. Assoc. 2006, 42, 1033–1046. [Google Scholar] [CrossRef]
- Hong, Z.; Kalbarczyk, Z.; Iyer, R.K. A Data-Driven Approach to Soil Moisture Collection and Prediction. In Proceedings of the 2016 IEEE International Conference on Smart Computing (SMARTCOMP), St. Louis, MO, USA, 18–20 May 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Y.; Mei, L.; Ki, S.O. Prediction of Soil Moisture Based on Extreme Learning Machine for an Apple Orchard. In Proceedings of the 2014 IEEE 3rd International Conference on Cloud Computing and Intelligence Systems, Shenzhen, China, 27–29 November 2014; pp. 400–404. [Google Scholar] [CrossRef]
- Niu, H.; Meng, F.; Yue, H.; Yang, L.; Dong, J.; Zhang, X. Soil moisture prediction in peri-urban beijing, china: Gene expression programming algorithm. Intell. Autom. Soft Comput. 2021, 28, 93–106. [Google Scholar] [CrossRef]
- Gu, Z.; Zhu, T.; Jiao, X.; Xu, J.; Qi, Z. Evaluating the Neural Network Ensemble Method in Predicting Soil Moisture in Agricultural Fields. Agronomy 2021, 11, 1521. [Google Scholar] [CrossRef]
- Singh, G.; Sharma, D.; Goap, A.; Sehgal, S.; Shukla, A.K.; Kumar, S. Machine Learning Based Soil Moisture Prediction for Internet of Things Based Smart Irrigation System. In Proceedings of the 2019 5th International Conference on Signal Processing, Computing and Control (ISPCC), Solan, India, 10–12 October 2019; pp. 175–180. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, X.; Xu, L.; Dong, J.; Zhangzhong, L. A hybrid CNN-GRU model for predicting soil moisture in maize root zone. Agric. Water Manag. 2021, 245, 106649. [Google Scholar] [CrossRef]
- Chatterjee, S.; Dey, N.; Sen, S. Soil moisture quantity prediction using optimized neural supported model for sustainable agricultural applications. Sustain. Comput. Inform. Syst. 2020, 28, 100279. [Google Scholar] [CrossRef]
- Chaamwe, N.; Liu, W.; Jiang, H. Wave Propagation Communication Models for Wireless Underground Sensor Networks. In Proceedings of the 2010 IEEE 12th International Conference on Communication Technology, Nanjing, China, 11–14 November 2010; pp. 9–12. [Google Scholar] [CrossRef]
- Peplinski, N.R.; Ulaby, F.T.; Dobson, M.C. Dielectric properties of soils in the 0.3-1.3-GHz range. IEEE Trans. Geosci. Remote Sens. 1995, 33, 803–807. [Google Scholar] [CrossRef]
- Liu, S.; Li, Z.; Zhao, G. Attenuation characteristics of ground penetrating radar electromagnetic wave in aeration zone. Earth Sci. Inform. 2021, 14, 259–266. [Google Scholar] [CrossRef]
- Aroca, R.V.; Hernandes, A.C.; Magalhães, D.V.; Becker, M.; Vaz, C.M.P.; Calbo, A.G. Calibration of Passive UHF RFID Tags Using Neural Networks to Measure Soil Moisture. J. Sens. 2018, 2018, 3436503. [Google Scholar] [CrossRef] [Green Version]
- Hirani, P.; Balivada, S.; Chauhan, R.; Shaikh, G.; Murthy, L.; Balhara, A.; Ponduru, R.C.; Sharma, H.; Chary, S.; Subramanyam, G.B.; et al. Using Cyber Physical Systems to Map Water Quality over Large Water Bodies. In Proceedings of the 2018 IEEE SENSORS, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Manz, L. Frost heave. Geo News. 2011; pp. 1–7. Available online: https://www.dmr.nd.gov/ndgs/documents/newsletter/2011Summer/FrostHeave.pdf (accessed on 28 April 2022).
- Harris, C.R.; Millman, K.J.; van der Walt, S.J.; Gommers, R.; Virtanen, P.; Cournapeau, D.; Wieser, E.; Taylor, J.; Berg, S.; Smith, N.J.; et al. Array programming with NumPy. Nature 2020, 585, 357–362. [Google Scholar] [CrossRef]
- OpenStreetMap Contributors Planet Dump. Available online: https://planet.osm.org (accessed on 12 December 2020).
- Yu, X.; Wu, P.; Zhang, Z.; Wang, N.; Han, W. Electromagnetic wave propagation in soil for wireless underground sensor networks. Prog. Electromagn. Res. M 2013, 30, 11–23. [Google Scholar] [CrossRef] [Green Version]
- Luomala, J.; Hakala, I. Effects of Temperature and Humidity on Radio Signal Strength in Outdoor Wireless Sensor Networks. In Proceedings of the 2015 Federated Conference on Computer Science and Information Systems (FedCSIS), Lodz, Poland, 13–16 September 2015; pp. 1247–1255. [Google Scholar] [CrossRef] [Green Version]
- Emmert-Streib, F.; Yang, Z.; Feng, H.; Tripathi, S.; Dehmer, M. An Introductory Review of Deep Learning for Prediction Models With Big Data. Front. Artif. Intell. 2020, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the Dimensionality of Data with Neural Networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [Green Version]
- Marquardt, D. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J.Soc. Indust. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Levenberg, K.; Arsenal, F. A method for the solution of certain non-linear problems in least squares. Q. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef] [Green Version]
- Castro, W.; Oblitas, J.; Santa-Cruz, R.; Avila-George, H. Multilayer perceptron architecture optimization using parallel computing techniques. PLoS ONE 2017, 12, e0189369. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cigizoglu, H.K. Estimation, forecasting and extrapolation of river flows by artificial neural networks. Hydrol. Sci. J. 2003, 48, 349–361. [Google Scholar] [CrossRef]
- Liang, L.L.; Riveros-Iregui, D.A.; Emanuel, R.E.; McGlynn, B.L. A simple framework to estimate distributed soil temperature from discrete air temperature measurements in data-scarce regions. J. Geophys. Res. Atmos. 2014, 119, 407–417. [Google Scholar] [CrossRef]
- Dwyer, L.M.; Hayhoe, H.N.; Culley, J.L.B. Prediction of soil temperature from air temperature for estimating corn emergence. Can. J. Plant Sci. 1990, 70, 619–628. [Google Scholar] [CrossRef]
- Rankinen, K.; Karvonen, T.; Butterfield, D. A simple model for predicting soil temperature in snow-covered and seasonally frozen soil: Model description and testing. Hydrol. Earth Syst. Sci. 2004, 8, 706–716. [Google Scholar] [CrossRef] [Green Version]
- Jungqvist, G.; Oni, S.K.; Teutschbein, C.; Futter, M.N. Effect of Climate Change on Soil Temperature in Swedish Boreal Forests. PLoS ONE 2014, 9, e93957. [Google Scholar] [CrossRef] [Green Version]
- Cortes, C.; Vladimir, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Bergstra, J.; Bengio, Y. Random Search for Hyper-Parameter Optimization. J. Mach. Learn. Res. 2012, 13, 281–305. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in {P}ython. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Ribeiro, V.H.A.; Reynoso-Meza, G.; Siqueira, H.V. Multi-objective ensembles of echo state networks and extreme learning machines for streamflow series forecasting. Eng. Appl. Artif. Intell. 2020, 95, 103910. [Google Scholar] [CrossRef]







| Fall-2019 | Winter-2019 | Spring-2020 ** | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Min | Avg | Max | Min | Avg | Max | Min | Avg | Max | |
| VWC | 0.27 | 0.38 | 0.45 | 0.34 | 0.39 | 0.45 | 0.33 | 0.39 | 0.45 |
| EC | 2.13 | 5.34 | 7.24 | 2.44 | 5.23 | 8.2 | 3.83 | 5.62 | 8.56 |
| ST | 0.3 | 8.7 | 26.0 | 0.0 | 2.4 | 5.9 | 1.5 | 12.2 | 23.9 |
| AT | −15 | 4.7 | 29.5 | −21.8 | 0.3 | 18.2 | −4.7 | 10.7 | 31.9 |
| RH | 34.8 | 80.6 | 103.1 | 23.1 | 79.4 | 103.2 | 23.6 | 68.2 | 102.7 |
| P | 247 | 149 | 304 | ||||||
| Input Parameters | Training | Validation | Testing | ||||||
|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE (m3/m3) | MAE (m3/m3) | R2 | RMSE (m3/m3) | MAE (m3/m3) | R2 | RMSE (m3/m3) | MAE (m3/m3) | |
| Six-parameter model | |||||||||
| RSSI + K, D, ST, AT, P, RH | 0.917 | 0.01 | 0.006 | 0.812 | 0.013 | 0.007 | 0.809 | 0.012 | 0.007 |
| Two-parameter model | |||||||||
| RSSI + K, D | 0.249 | 0.026 | 0.016 | 0.259 | 0.026 | 0.016 | 0.237 | 0.026 | 0.016 |
| Three-parameter models | |||||||||
| RSSI + K, D, ST | 0.783 | 0.014 | 0.008 | 0.726 | 0.016 | 0.009 | 0.726 | 0.016 | 0.009 |
| RSSI + K, D, AT | 0.498 | 0.021 | 0.014 | 0.465 | 0.022 | 0.014 | 0.457 | 0.022 | 0.014 |
| RSSI + K, D, P | 0.262 | 0.026 | 0.016 | 0.248 | 0.026 | 0.016 | 0.249 | 0.025 | 0.016 |
| RSSI + K, D, RH | 0.314 | 0.025 | 0.015 | 0.262 | 0.026 | 0.016 | 0.254 | 0.026 | 0.016 |
| Four-parameter models | |||||||||
| RSSI + K, D, ST, AT | 0.821 | 0.013 | 0.008 | 0.764 | 0.015 | 0.009 | 0.742 | 0.015 | 0.009 |
| RSSI + K, D, ST, RH | 0.814 | 0.013 | 0.008 | 0.716 | 0.016 | 0.01 | 0.74 | 0.015 | 0.009 |
| RSSI + K, D, ST, P | 0.723 | 0.016 | 0.01 | 0.686 | 0.017 | 0.01 | 0.677 | 0.017 | 0.01 |
| RSSI + K, D, AT, RH | 0.65 | 0.018 | 0.012 | 0.593 | 0.019 | 0.013 | 0.536 | 0.02 | 0.013 |
| RSSI + K, D, AT, P | 0.483 | 0.022 | 0.014 | 0.47 | 0.022 | 0.014 | 0.431 | 0.022 | 0.015 |
| RSSI + K, D, RH, P | 0.306 | 0.025 | 0.016 | 0.254 | 0.026 | 0.016 | 0.257 | 0.025 | 0.016 |
| ST, AT, P, RH | 0.499 | 0.021 | 0.016 | 0.437 | 0.022 | 0.017 | 0.407 | 0.023 | 0.017 |
| Five-parameter models | |||||||||
| RSSI + K, D, ST, AT, P | 0.807 | 0.013 | 0.008 | 0.762 | 0.015 | 0.009 | 0.734 | 0.015 | 0.009 |
| RSSI + K, D, ST, AT, RH * | 0.889 | 0.01 | 0.006 | 0.833 | 0.012 | 0.008 | 0.82 | 0.012 | 0.008 |
| RSSI + K, D, AT, RH, P | 0.617 | 0.018 | 0.012 | 0.562 | 0.02 | 0.013 | 0.552 | 0.02 | 0.013 |
| RSSI + K, D, ST, RH, P | 0.745 | 0.015 | 0.01 | 0.697 | 0.016 | 0.01 | 0.697 | 0.016 | 0.01 |
| Kernel/Activation | Training | Testing | |||||
|---|---|---|---|---|---|---|---|
| R2 | RMSE (m3/m3) | MAE (m3/m3) | R2 | RMSE (m3/m3) | MAE (m3/m3) | ||
| SVR | Linear | 0.17 | 0.072 | 0.0544 | 0.17 | 0.073 | 0.055 |
| Sigmoid | 0.17 | 0.072 | 0.055 | 0.18 | 0.073 | 0.054 | |
| Poly | 0.25 | 0.069 | 0.055 | 0.25 | 0.069 | 0.054 | |
| RBF * | 0.59 | 0.051 | 0.03 | 0.56 | 0.053 | 0.032 | |
| ELM | Sigmoid | 0.47 | 0.058 | 0.0411 | 0.48 | 0.058 | 0.041 |
| Sine | 0.44 | 0.06 | 0.044 | 0.43 | 0.06 | 0.044 | |
| Tanh | 0.42 | 0.061 | 0.045 | 0.39 | 0.062 | 0.045 | |
| Triangular basis | 0.43 | 0.06 | 0.043 | 0.43 | 0.061 | 0.044 | |
| Hard limit | 0.39 | 0.06 | 0.045 | 0.39 | 0.062 | 0.046 | |
| Relu | 0.39 | 0.045 | 0.06 | 0.38 | 0.045 | 0.063 | |
| RBF * | 0.43 | 0.044 | 0.06 | 0.41 | 0.045 | 0.062 | |
| Kernel Function | C | Epsilon | Gamma | Degree |
|---|---|---|---|---|
| Linear | 0.1 | 0.1 | - | - |
| Sigmoid | 100 | 0.1 | 0.001 | - |
| Poly | 10 | 0.1 | 2 | 3 |
| RBF | 10 | 0.01 | 20 | - |
| Activation Function | Number of Neurons in the Hidden Layer |
|---|---|
| Sigmoid | 385 |
| Sine | 270 |
| Tanh | 180 |
| Triangular basis | 265 |
| Hard limit | 970 |
| Relu | 465 |
| RBF | 210 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Balivada, S.; Grant, G.; Zhang, X.; Ghosh, M.; Guha, S.; Matamala, R. A Wireless Underground Sensor Network Field Pilot for Agriculture and Ecology: Soil Moisture Mapping Using Signal Attenuation. Sensors 2022, 22, 3913. https://doi.org/10.3390/s22103913
Balivada S, Grant G, Zhang X, Ghosh M, Guha S, Matamala R. A Wireless Underground Sensor Network Field Pilot for Agriculture and Ecology: Soil Moisture Mapping Using Signal Attenuation. Sensors. 2022; 22(10):3913. https://doi.org/10.3390/s22103913
Chicago/Turabian StyleBalivada, Srinivasa, Gregory Grant, Xufeng Zhang, Monisha Ghosh, Supratik Guha, and Roser Matamala. 2022. "A Wireless Underground Sensor Network Field Pilot for Agriculture and Ecology: Soil Moisture Mapping Using Signal Attenuation" Sensors 22, no. 10: 3913. https://doi.org/10.3390/s22103913