1. Introduction
The rapid development of wireless communication technology and the omnipresence of mobile devices enable the rapid growth of Location-Based Services (LBSs) [
1,
2]. Outdoor LBSs, such as the Global Navigation Satellite System (GNSS), are used for applications such as navigation, emergency services, timekeeping, or uses for military or geodesy purposes [
3,
4]. Indoor LBSs complement outdoor LBSs. For example, indoor LBSs can be used to track assets, build management, provide indoor location information for emergency services, and navigate customers in shopping centers [
5,
6,
7]. In healthcare, applications include monitoring patients in nursing homes, tracking Alzheimer’s patients, monitoring the activities and movements of rehabilitating patients, or improving the safety of elderly patients [
8,
9,
10].
The outdoor LBSs cannot be used indoors due to blocked signals. This is because of the additional challenges such as multipath effects, Non-Line-of-Sight (NLoS), moving humans or objects, ambient noise, and electromagnetic interference, which need to be addressed [
11]. Reliable Indoor Positioning Systems (IPSs) must satisfy key requirements:
Accuracy: Accuracy is a key improvement target for most indoor LBSs’ research [
1]. Improving the indoor LBSs can be addressed by signal processing, additional hardware, model-based analysis, or new communication protocols [
12,
13,
14,
15,
16,
17].
Availability: IPSs should cover all locations within the serviced indoor area at all times. Preferably, IPSs should work with widely available devices, such as mobile phones or WiFi [
12]. Some solutions, such as Ultra-Wide Band (UWB) [
18] or Visible Light Communication (VLC) [
15,
19] systems, require additional hardware, limiting their usability.
Scalability: IPSs should perform well when the indoor environment changes. Most Machine Learning (ML) or fingerprinting-based IPSs lack reliability in changing environments [
20] because these methods are highly dependent on pre-training defined by particular environment settings.
Cost: IPSs’ implementation should not require a high capital cost. The system should not include any additional infrastructure or expensive equipment on the server and user sides. The system should be easily maintained without investing much labor and hardware maintenance.
Other requirements: Requirements specific to the use scenarios and applications may include update rates, privacy, security, and user interfaces, among others [
21].
The availability, ubiquity, scalability, and low cost of Wireless Local Area Network (WLAN) systems make WiFi-based indoor localization a competitive solution for IPSs. The protocols defined in the IEEE802.11a/n standards make the Channel State Information (CSI) of WiFi signals readily available [
22]. CSI provides stable and feature-rich channel information, which enables the estimation of the AoA. The AoA and the signal strength information enable the estimation of the source position. The AoA is calculated by applying algorithms, such as MUSIC [
23]. The AoA-based localization algorithms, such as SpotFi [
13], can achieve a decimeter-level median localization accuracy in an office environment.
Factors affecting the accuracy of indoor localization of specific location points are poorly understood. Most localization performance assessments utilize median accuracy [
13,
14,
24,
25,
26], but they do not provide detailed spatial assessment maps. We are particularly interested in possible blind localization points in indoor spaces and the reasons for their existence. Therefore, we performed extensive data analysis and factor analysis based on the experiment. The sources of errors may include doors, obstacles, human activities, space settings, electromagnetic interferences, and the number of AP, among others [
27]. To better understand the factors that limit localization accuracy and improve performance, we focused on better utilizing available information, optimizing localization algorithms, and performing a comprehensive localization testing experiment.
Utilization of information: Most of the information available for signal processing is not considered or fully utilized. For example, AoA-based approaches such as ArrayTrack [
25] and SpotFi [
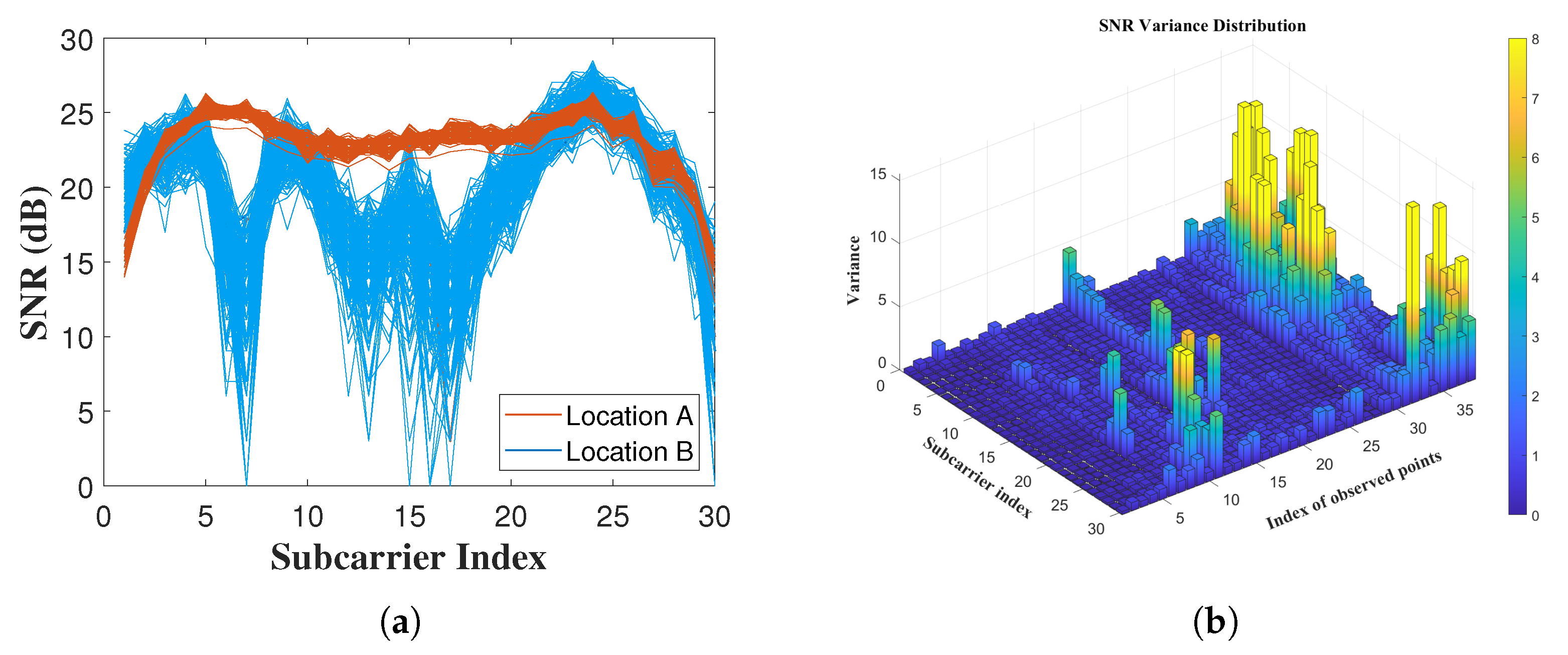
13] do not consider the amplitude of the AoA spectrum for the LoS identification. The amplitude of the AoA spectrum can reflect the power of different paths for better LoS identification. In addition, the variance of RSS is also neglected in most reported algorithms. We used additional information to improve IPS performance.
Optimization by joint localization: Most of the known methods are not optimized for multi-AP localization. For instance, ROArray [
14] locates the target among multiple APs by minimizing an RSS-based objective function. SpotFi [
13] and MaTrack [
28] use similar approaches to find the optimal solution from a large number of results. These methods are not computationally efficient in performing joint localization.
Adequacy of TP-based analysis: Most of the reported methods in WiFi indoor localization do not provide a detailed analysis of multiple TPs and scenarios. Some reports use simulations to assess the accuracy of localizations [
29] or actual point localization error [
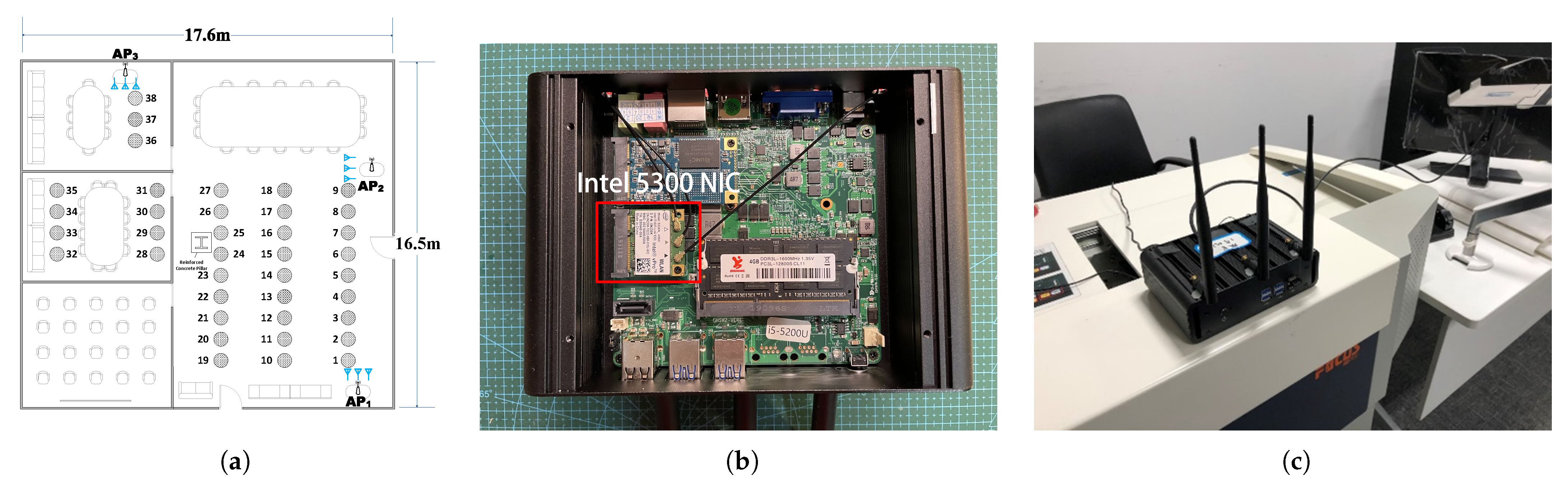
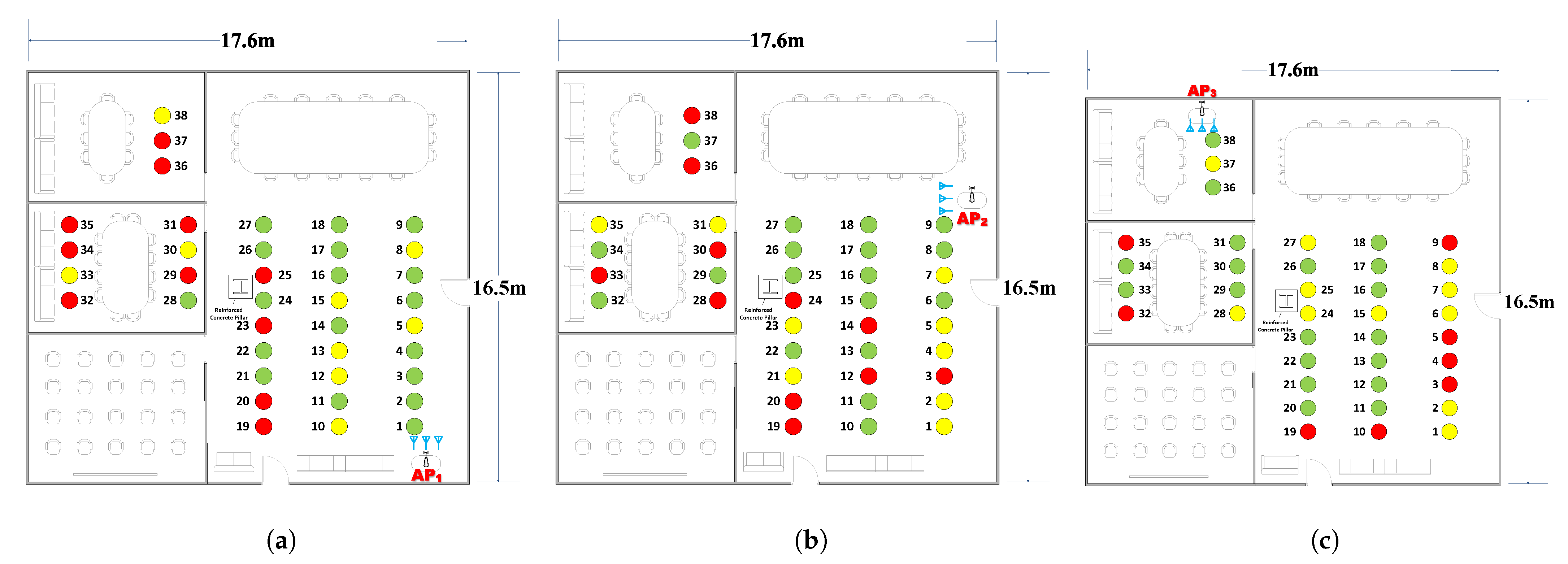
30], but the TP-based error analysis is largely lacking in available reports. The TP-based error maps enable an analysis of factors that affect localization accuracy. We performed a localization experiment and accuracy analysis at each of the 38 TPs within a test space (a multi-room space with three APs).
We intended to compare the performance of different localization algorithms. However, some available algorithms [
14] are proprietary and do not provide the source code. Other studies [
31] involved custom-designed hardware, which could not be reproduced for our study. Therefore, it was not possible to compare the performance of the majority of the reported algorithms. The well-known SpotFi algorithm was chosen as the benchmark; it is available as open-source [
32] and uses a commodity WiFi device.
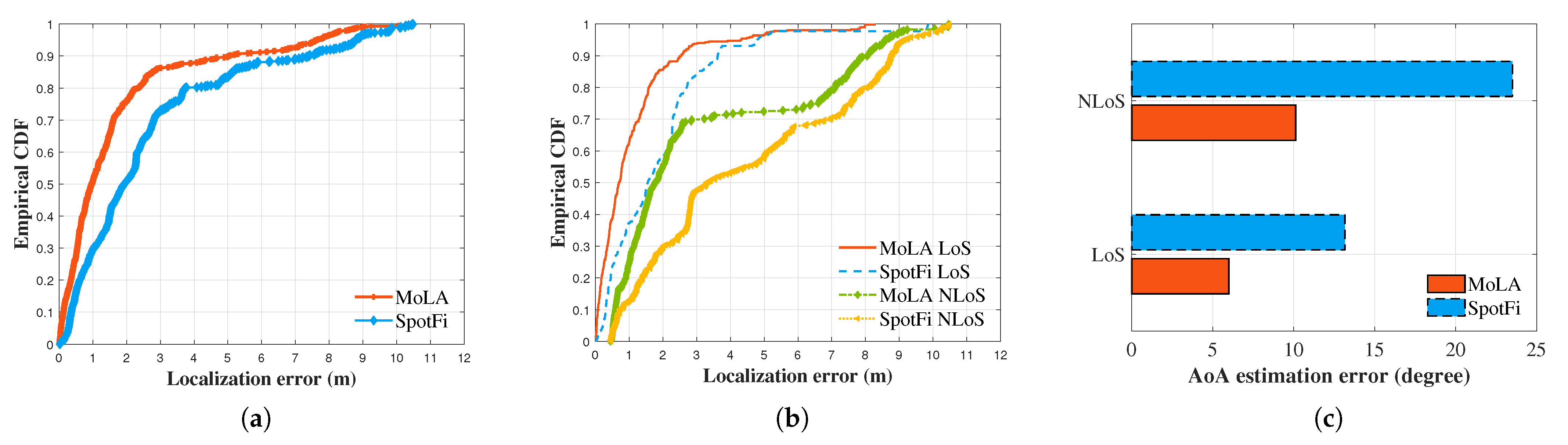
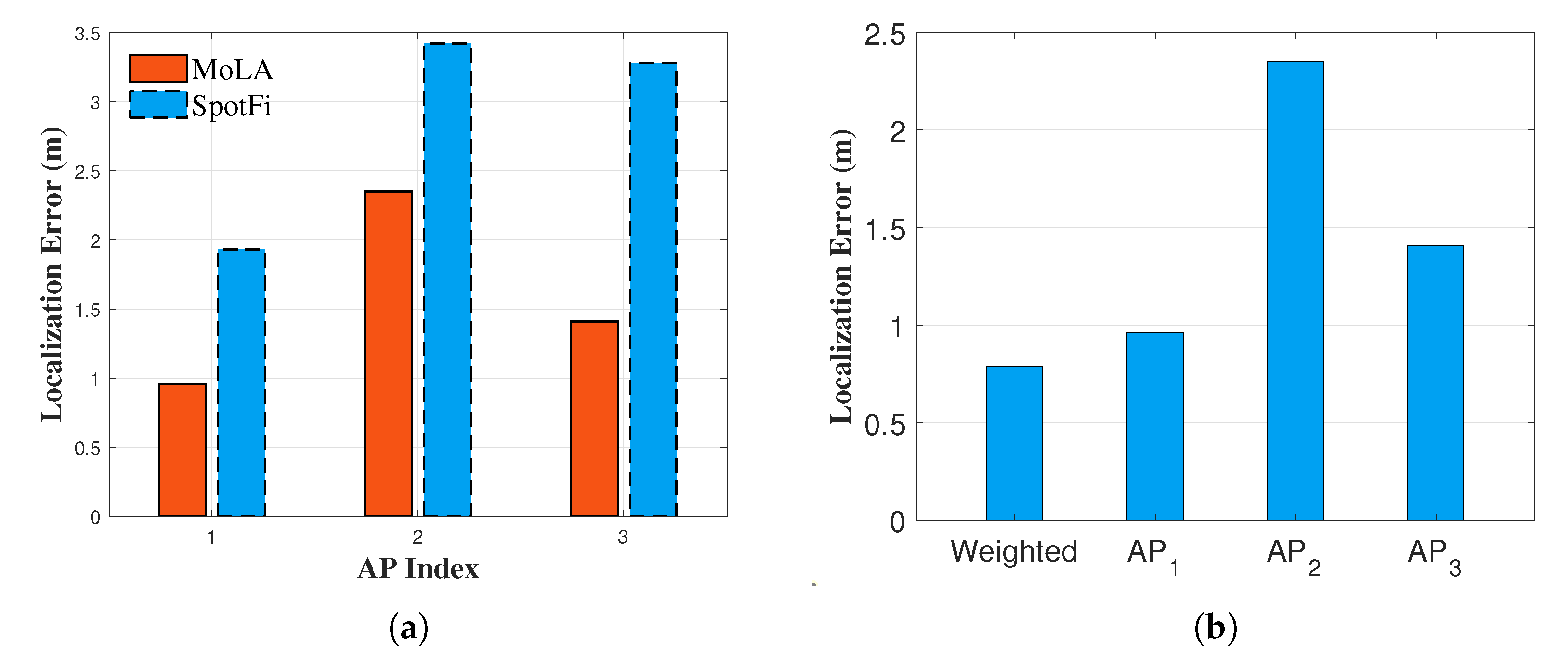
We previously developed MoLA, a Multi-step Optimization Localization Algorithm, and compared the performance of MoLA and SpotFi for a single AP. We showed that the multi-step optimization used in MoLA improved the median accuracy of indoor localization as compared with SpotFi (0.96 m vs. 1.93 m) in the test space [
33]. To enable further comparisons and encourage knowledge sharing, we provided MoLA to the community as open-source [
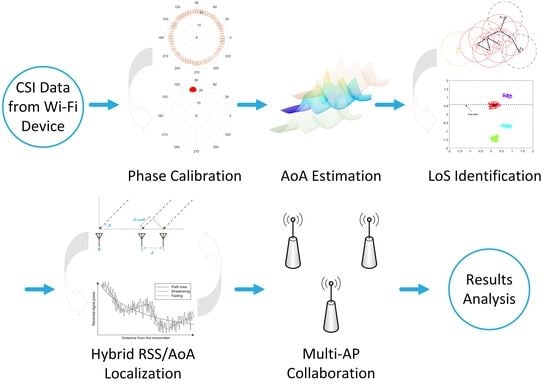
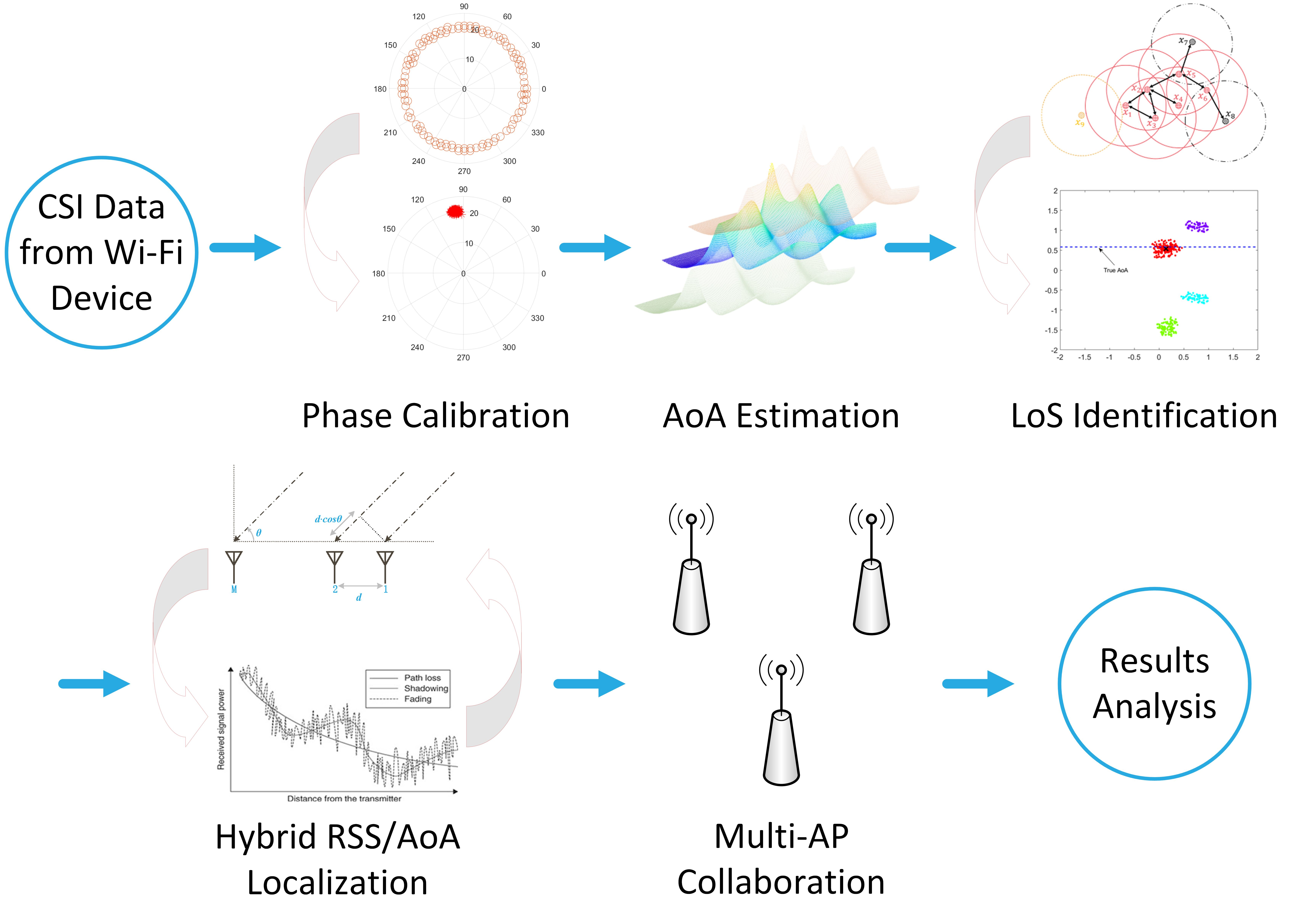
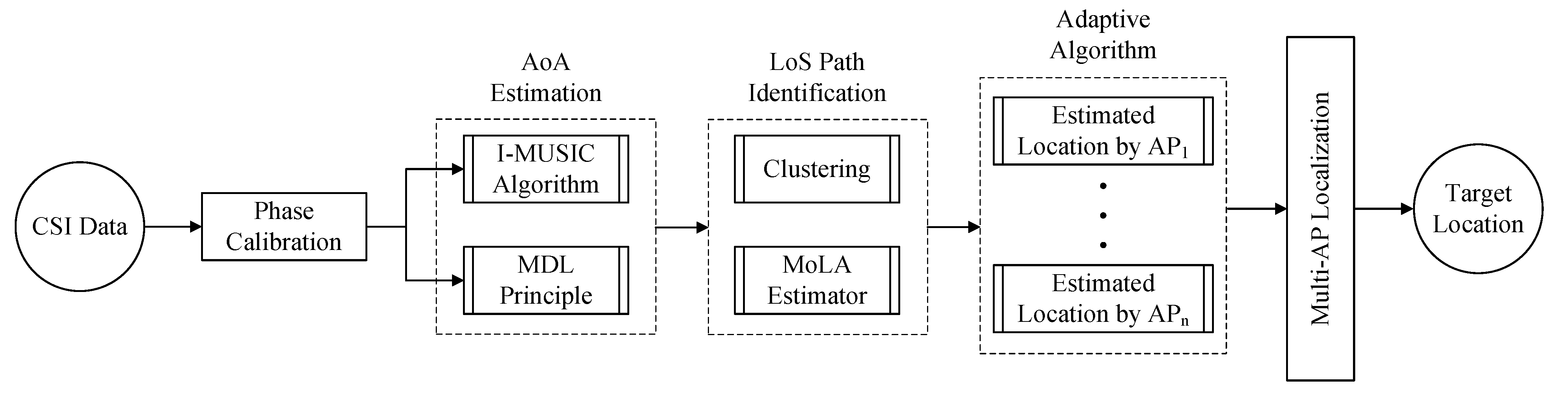
34]. We extended the initial version of MoLA and used it to perform a multi-AP assessment of indoor localization accuracy by using multiple APs. For joint estimation, MoLA locates the target by weighting different APs based on the variance information of the RSS. MoLA adaptively combines multiple APs to improve the localization results. The flowchart of the proposed method is shown in
Figure 1. There are three main contributions of this work:
Developed and implemented a new self-adaptive multi-AP localization algorithm that improves MoLA system performance;
Performed a comprehensive statistical analysis of individual TP localization accuracy;
Analyzed the effects of TP location in the room setup on localization accuracy. We identified and described key factors that affect the individual TP and the overall localization accuracy.
Section 2 describes related works in CSI-based indoor localization. The technical background of this study is presented in
Section 3.
Section 4 describes the design of MoLA and its multi-AP localization extension.
Section 5 describes the hardware platform and the experimental results in different cases.
Section 6 analyzes the factors of localization errors, and
Section 7 concludes this paper.
3. Background
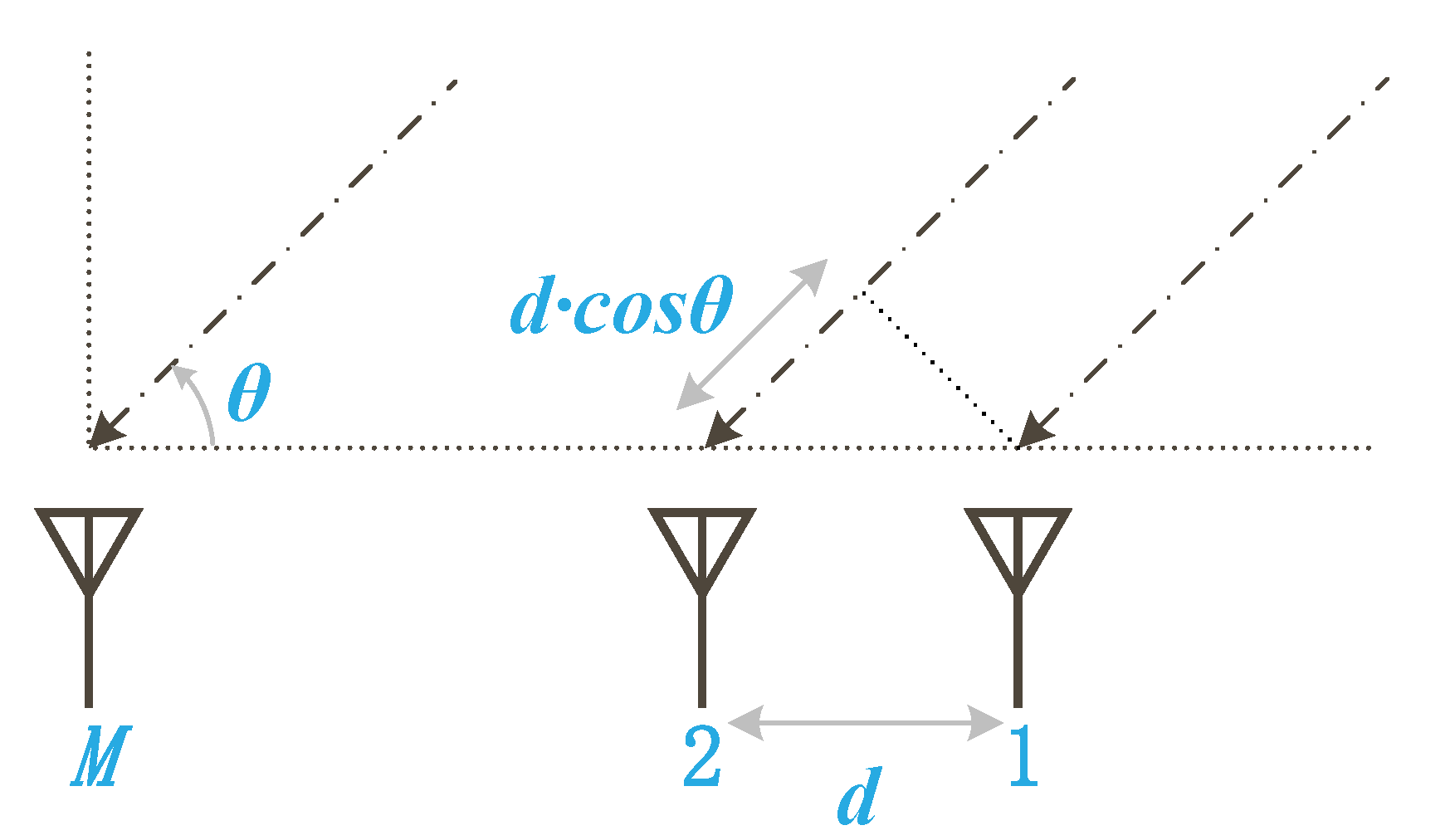
Assume that the receiver has a Uniform Linear Array (ULA), consisting of
M antennas spaced at a distance
d. As the signal emitted from the transmitter reaches the antenna array, an AoA with an angle
is generated due to the distance difference existing between the two adjacent antennas (
Figure 2). In indoor environments, obstacles often reflect signals, resulting in multipath effects. Assuming that there are
L propagation paths, the phase shift of the
lth path at each antenna is [
44]:
where
f is the signal frequency and
c is the speed of light. In an OFDM system, each subcarrier is modulated into a different frequency, which causes a delay. The phase shift caused by the delay function is:
where
is the frequency interval between subcarriers and
is the transmission delay of the
lth path. Combining the phase shift
and phase shift
, the steering vector matrix with
K subcarriers’ transmission delays can be written as:
After obtaining the steering vector, we calculate the auto-correlation matrix of the data matrix and apply the MUSIC algorithm. The data matrix is obtained from the device, as a CSI matrix
, expressed as:
The auto-correlation matrix
is defined by [
44]:
After performing the Eigenvalue Decomposition (EVD) of
, the noise subspace
can be obtained. The MUSIC algorithm is used to find the AoA and ToF:




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}