
Shaking Table Attached to Magnetorheological Damper: Simulation and Experiments for Structural Engineering

 ,
,  , , , and
, , , and 
Abstract
:1. Introduction
Literature Review on Shaking Table Attached to MR Dampers
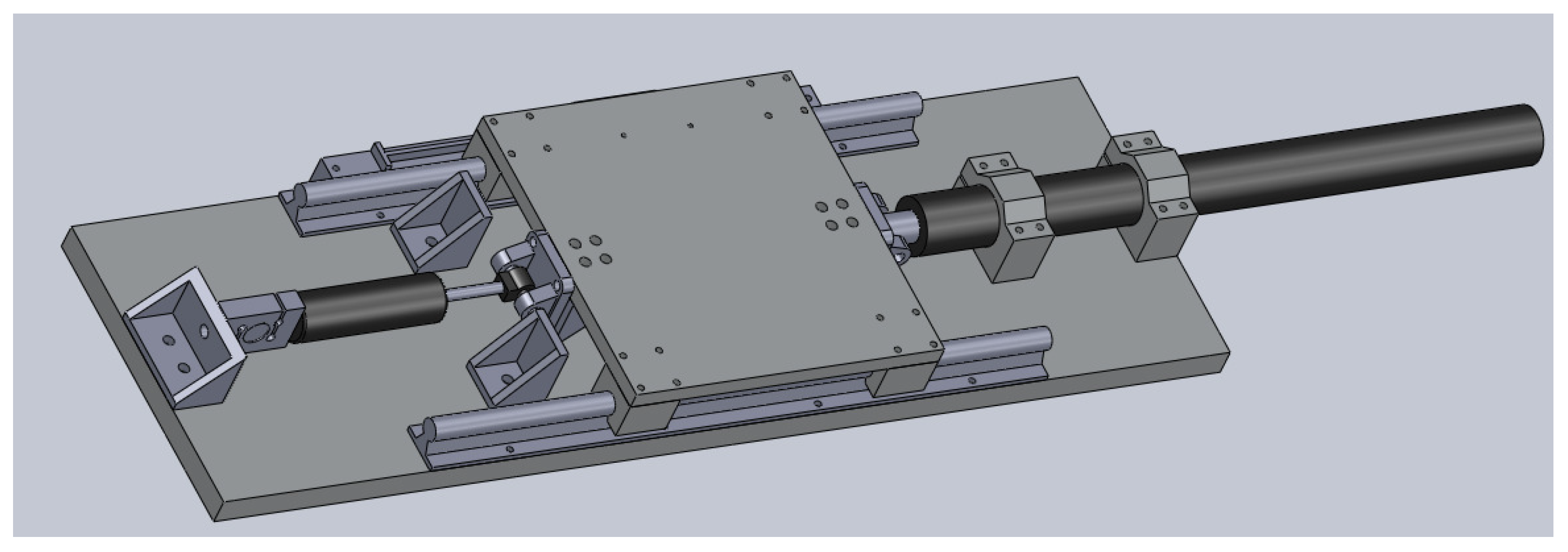
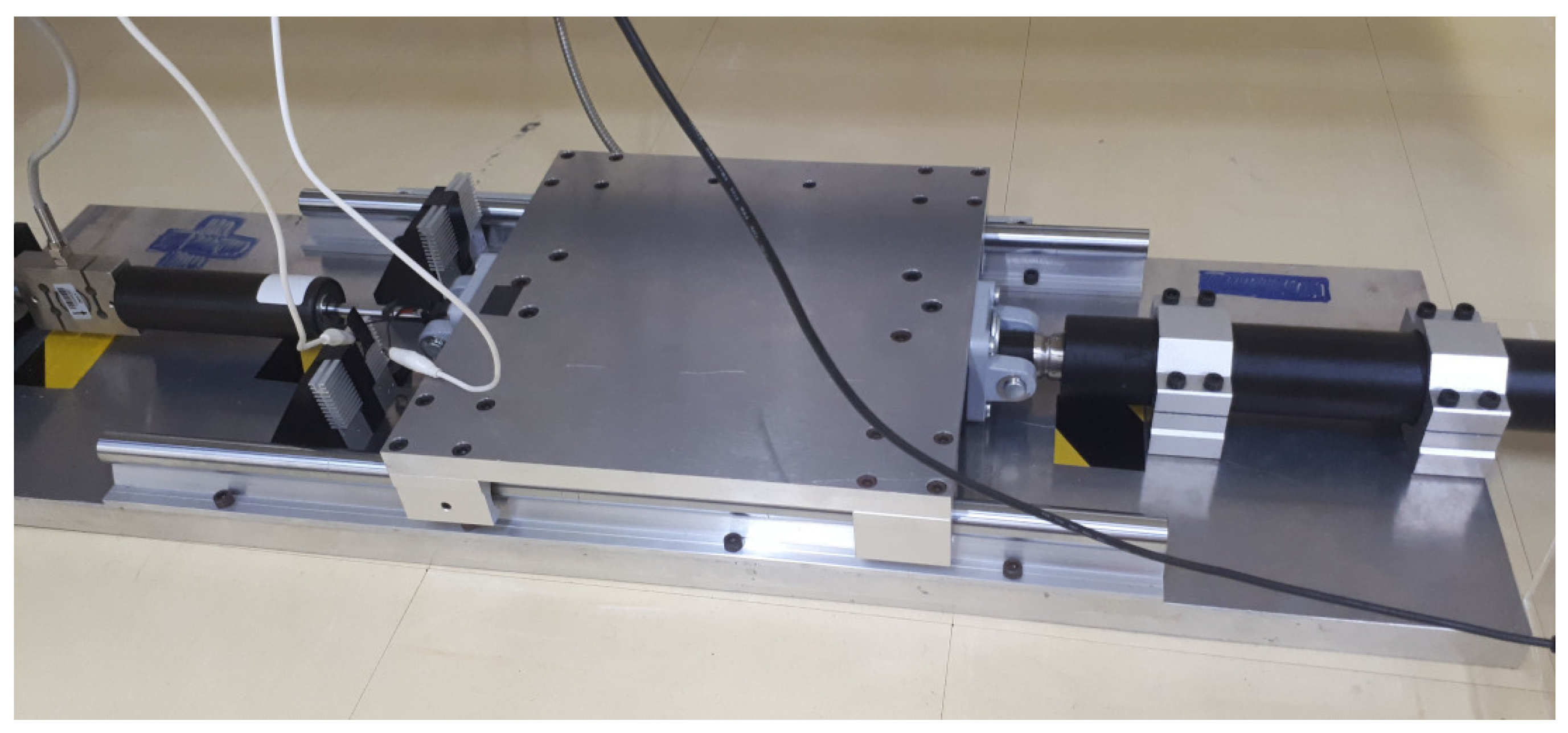
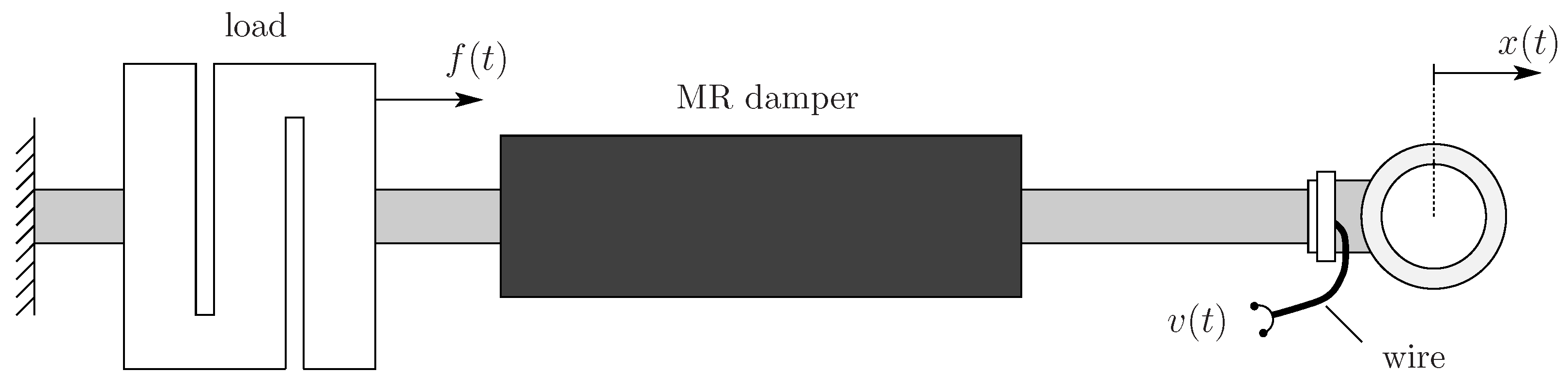
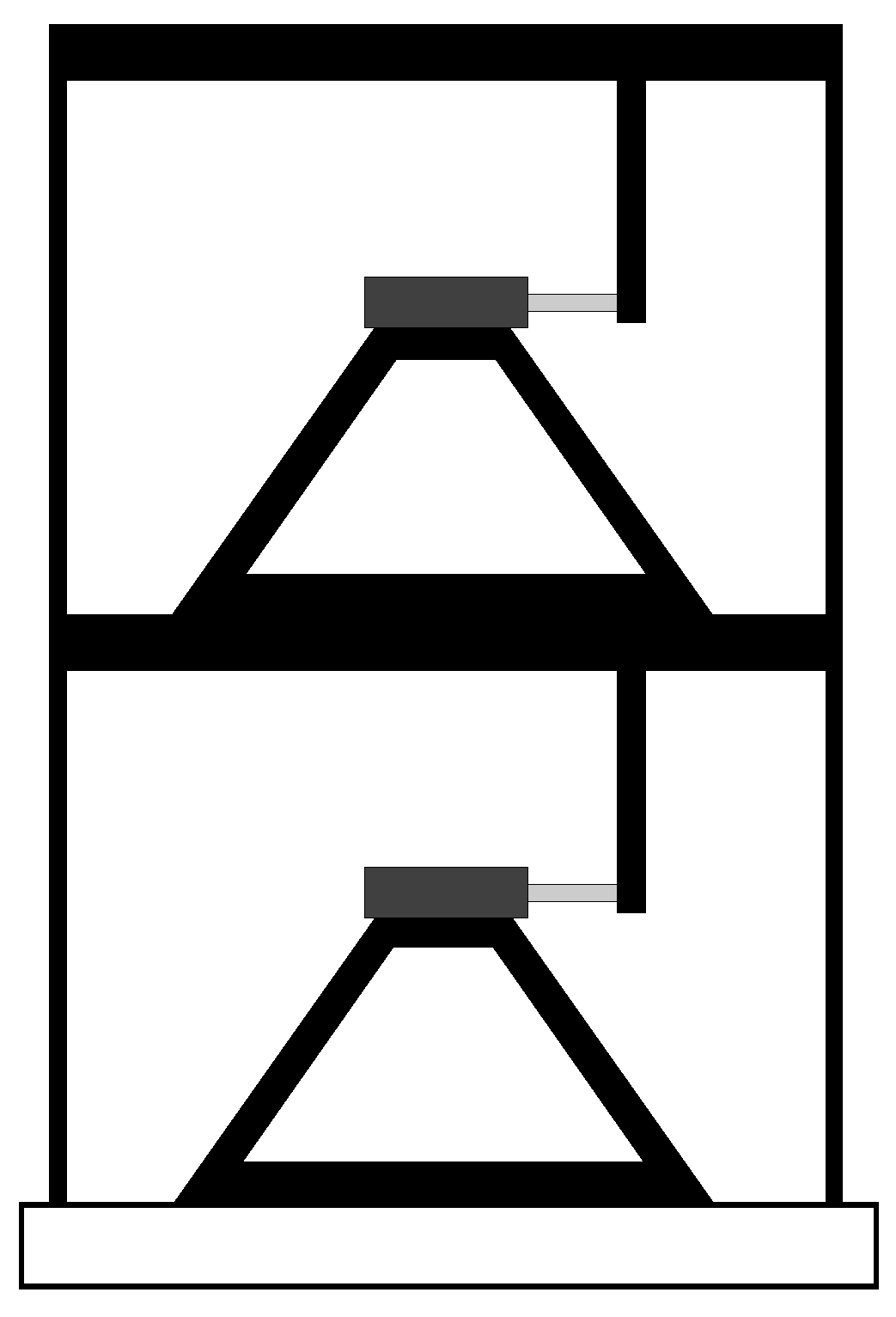
2. Experimental Setup
3. Modeling and Identification
- •
- Step 1: Fix some constant and set for all .
- •
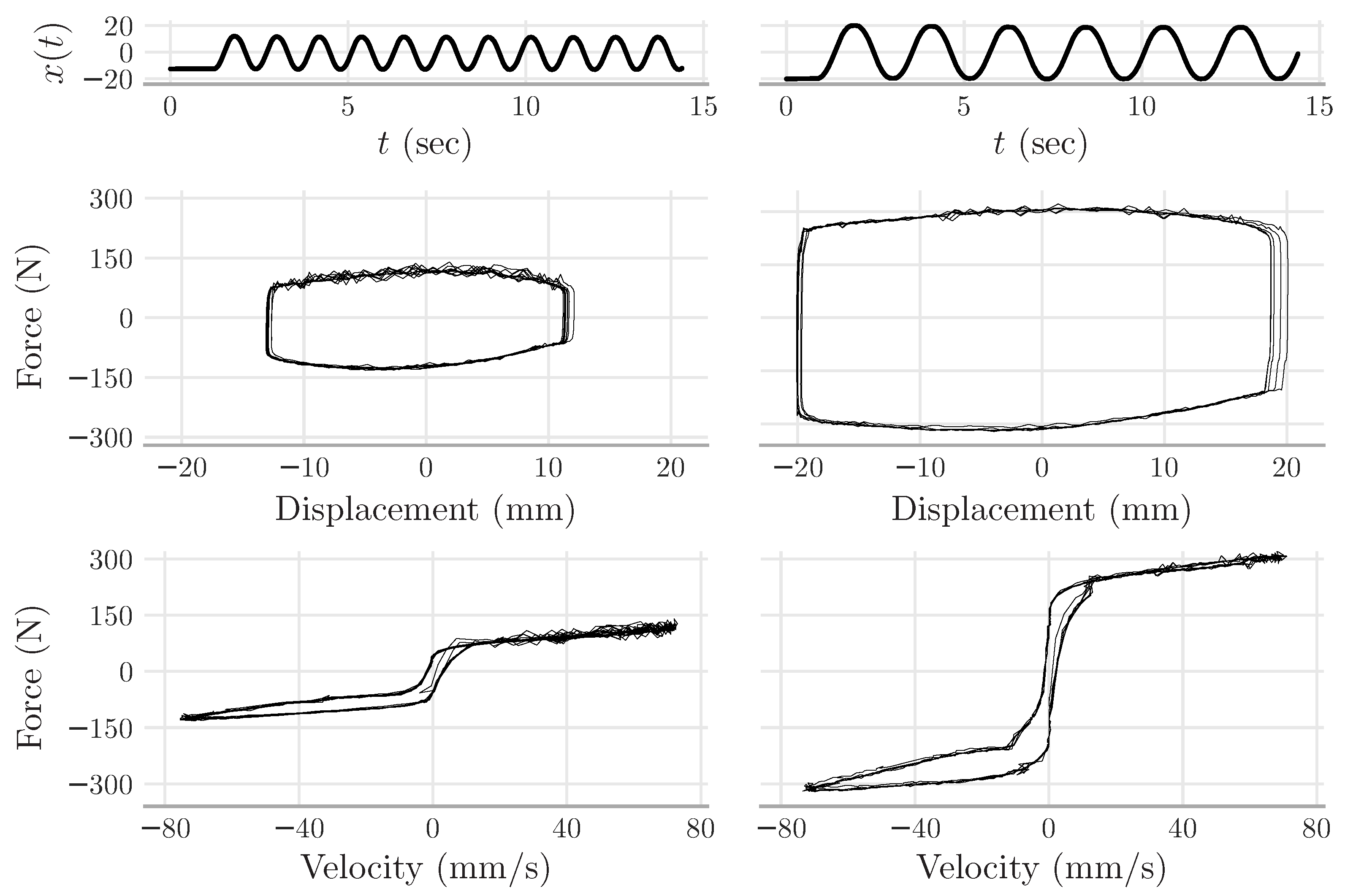
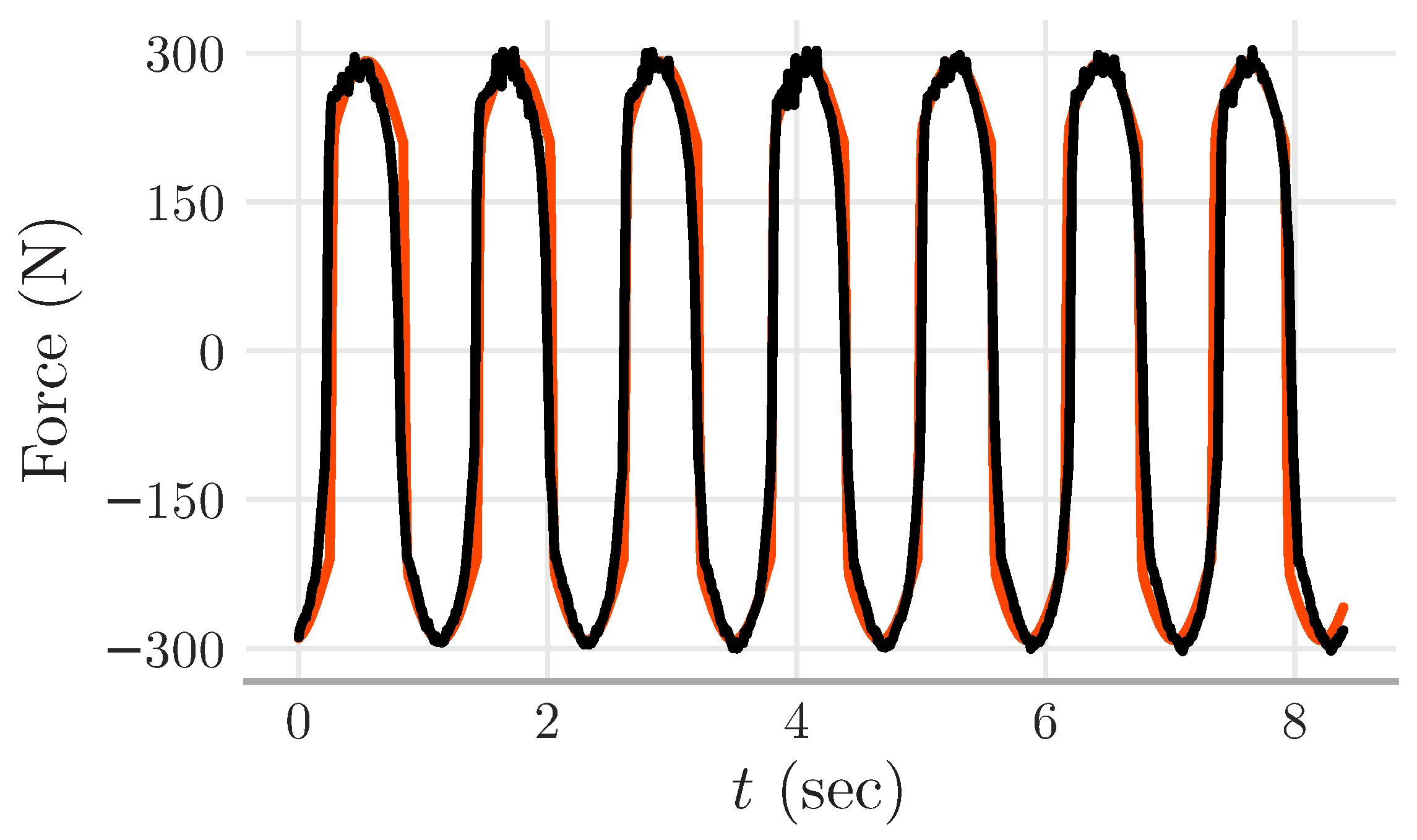
- Step 2: Move the MR damper in a way that a periodic signal appears in and collect the corresponding force . Once the MR damper has reached the periodic equilibrium, we consider as the time necessary to complete a cycle. Separate to the analysis only the data corresponding to the interval , say , . Note that the curve constructed from the pair , must have a hysteresis shape [34].
- •
- Step 3: Select the data corresponding to the MR damper loading part, and let the corresponding interval be . Compute
- •
- Step 4: Now consider the system (1) as a function of x so as to define the function as (see [21,34])From the function , take some such that and define the constant
- •
- Step 5: Choose some constant , and calculate
4. Experimental Results
4.1. Limitations
4.2. Motivation for Earthquake Simulation
4.3. Simulation Results
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chae, Y.; Ricles, J.M.; Sause, R. Modeling of a large-scale magneto-rheological damper for seismic hazard mitigation. Part II: Semi-active mode. Earthq. Eng. Struct. Dyn. 2013, 42, 687–703. [Google Scholar] [CrossRef]
- Jung, J.W.; Kim, M.K.; Kim, J.H. Experimental study on the floor responses of a base-isolated frame structure via shaking table tests. Eng. Struct. 2022, 253, 113763. [Google Scholar] [CrossRef]
- Yang, G.; Spencer, B.; Carlson, J.; Sain, M. Large-scale MR fluid dampers: Modeling and dynamic performance considerations. Eng. Struct. 2002, 24, 309–323. [Google Scholar] [CrossRef]
- Yoon, D.S.; Park, Y.J.; Choi, S.B. An eddy current effect on the response time of a magnetorheological damper: Analysis and experimental validation. Mech. Syst. Signal Process. 2019, 127, 136–158. [Google Scholar] [CrossRef]
- Ahamed, R.; Choi, S.B.; Ferdaus, M.M. A state of art on magneto-rheological materials and their potential applications. J. Intell. Mater. Syst. Struct. 2018, 29, 2051–2095. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, J. A novel phenomenological model for predicting the nonlinear hysteresis response of magnetorheological gel. Mater. Des. 2020, 196, 109074. [Google Scholar] [CrossRef]
- Luong, Q.V.; Jang, D.-S. Robust adaptive control for an aircraft landing gear equipped with a magnetorheological damper. Appl. Sci. 2020, 10, 1459. [Google Scholar] [CrossRef] [Green Version]
- Bai, X.X.F.; Li, C.X. Precise real-time hysteretic force tracking of magnetorheological damper. Smart Mater. Struct. 2020, 29, 104002. [Google Scholar] [CrossRef]
- Sun, S.; Tang, X.; Yang, J.; Ning, D.; Du, H.; Zhang, S.; Li, W. A new generation of magnetorheological vehicle suspension system with tunable stiffness and damping characteristics. IEEE Trans. Ind. Inform. 2019, 15, 4696–4708. [Google Scholar] [CrossRef]
- Duchanoy, C.A.; Moreno-Armendáriz, M.A.; Moreno-Torres, J.C.; Cruz-Villar, C.A. A Deep Neural Network Based Model for a Kind of Magnetorheological Dampers. Sensors 2019, 19, 1333. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Hua, X.; Wang, X.; Wu, J.; Sun, H.; Song, G. Mechanical behavior of magnetorheological dampers after long-term operation in a cable vibration control system. Struct. Control Health Monit. 2019, 26, e2280. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.W.; Xu, Z.D.; Guo, Y.Q.; Huang, X.H.; Zhang, J.; Zhao, Y.L.; Yang, Y.; Zhu, C.; Zhou, M. Single input magnetorheological pseudo negative stiffness control for bridge stay cables. Smart Mater. Struct. 2020, 30, 015032. [Google Scholar] [CrossRef]
- Ahamed, R.; Rashid, M.; Ferdaus, M.; Yusuf, H.B. Modelling and performance evaluation of energy harvesting linear magnetorheological (MR) damper. J. Low Freq. Noise Vib. Act. Control 2017, 36, 177–192. [Google Scholar] [CrossRef] [Green Version]
- Fu, Q.; Wang, D.H.; Xu, L.; Yuan, G. A magnetorheological damper-based prosthetic knee (MRPK) and sliding mode tracking control method for an MRPK-based lower limb prosthesis. Smart Mater. Struct. 2017, 26, 045030. [Google Scholar] [CrossRef]
- Wang, D.; Wang, Y.; Zi, B.; Cao, Z.; Ding, H. Development of an active and passive finger rehabilitation robot using pneumatic muscle and magnetorheological damper. Mech. Mach. Theory 2020, 147, 103762. [Google Scholar] [CrossRef]
- Pandit, S.; Godiyal, A.K.; Vimal, A.K.; Singh, U.; Joshi, D.; Kalyanasundaram, D. An Affordable Insole-Sensor-Based Trans-Femoral Prosthesis for Normal Gait. Sensors 2018, 18, 706. [Google Scholar] [CrossRef] [Green Version]
- Spencer, B.F.; Dyke, J.; Sain, M.K.; Carlson, J.D. Phenomenological model for magnetorheological dampers. Eng. Mech. 1995, 123, 230–238. [Google Scholar] [CrossRef]
- Yarali, E.; Mohammadi, A.; Mafakheri, S.; Baghani, M.; Adibi, H. Mathematical modeling and experimental evaluation of a prototype double-tube Magnetorheological damper. SN Appl. Sci. 2019, 1, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Savaia, G.; Panzani, G.; Corno, M.; Cecconi, J.; Savaresi, S.M. Hammerstein–Wiener modelling of a magneto-rheological dampers considering the magnetization dynamics. Control Eng. Pract. 2021, 112, 104829. [Google Scholar] [CrossRef]
- Zhao, Y.L.; Xu, Z.D. A hysteretic model considering Stribeck effect for small-scale magnetorheological damper. Smart Mater. Struct. 2018, 27, 065021. [Google Scholar] [CrossRef]
- Ikhouane, F.; Dyke, S.J. Modeling and identification of a shear mode magnetorheological damper. Smart Mater. Struct. 2007, 16, 605–616. [Google Scholar] [CrossRef]
- Yu, J.; Dong, X.; Wang, X.; Pan, C.; Zhou, Y. Asymmetric dynamic model of temperature-dependent magnetorheological damper and application for semi-active system. Front. Mater. 2019, 6, 1–10. [Google Scholar] [CrossRef]
- Bui, Q.; Bai, X.; Hung Nguyen, Q. Dynamic modeling of MR dampers based on quasi–static model and Magic Formula hysteresis multiplier. Eng. Struct. 2021, 245, 112855. [Google Scholar] [CrossRef]
- Lu, H.; Xu, Z.; Gao, K.; Zhang, Z.; Li, Z.; Xie, J. A new invertible model of magnetorheological damper based on sigmoid function. Smart Mater. Struct. 2020, 29, 115026. [Google Scholar] [CrossRef]
- Ding, Y.; Zhang, L.; Zhu, H.T.; Li, Z.X. A new magnetorheological damper for seismic control. Smart Mater. Struct. 2013, 22, 115003. [Google Scholar] [CrossRef]
- Hu, G.; Liu, Q.; Ding, R.; Li, G. Vibration control of semi-active suspension system with magnetorheological damper based on hyperbolic tangent model. Adv. Mech. Eng. 2017, 9, 1–15. [Google Scholar] [CrossRef]
- Weia, S.; Wang, J.; Ou, J. Method for improving the neural network model of the magnetorheological damper. Mech. Syst. Signal Process. 2021, 149, 107316. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, W.; Hu, H.; Zhu, Q.; Xie, Z. An optimal NARX neural network identification model for a magnetorheological damper with force-distortion behavior. Front. Mater. 2020, 7, 1–10. [Google Scholar] [CrossRef]
- Ni, Y.Q.; Chen, Z.H.; Or, S.W. Experimental identification of a self-sensing magnetorheological damper using soft computing. J. Eng. Mech. 2015, 141, 04015001. [Google Scholar] [CrossRef]
- Chen, C.; Peng, C.; Hou, H.; Liang, J. Comparison of magnetorheological damper models through parametric uncertainty analysis using generalized likelihood uncertainty estimation. J. Eng. Mech. 2021, 147, 04020146. [Google Scholar] [CrossRef]
- Şahin, İ.; Engin, T.; Çeşmeci, Ş. Comparison of some existing parametric models for magnetorheological fluid dampers. Smart Mater. Struct. 2010, 19, 035012. [Google Scholar] [CrossRef]
- Wang, D.H.; Liao, W.H. Magnetorheological fluid dampers: A review of parametric modelling. Smart Mater. Struct. 2011, 20, 023001. [Google Scholar] [CrossRef]
- Ikhouane, F.; Rodellar, J. Systems with Hysteresis: Analysis, Identification and Control Using the Bouc-Wen Model; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Aguirre, N.; Ikhouane, F.; Rodellar, J.; Christenson, R. Parametric identification of the Dahl model for large scale MR dampers. Struct. Control Health Monit. 2012, 19, 332–347. [Google Scholar] [CrossRef]
- Jiang, K.; Wen, J.; Han, Q.; Du, X. Identification of nonlinear hysteretic systems using sequence model-based optimization. Struct. Control Health Monit. 2020, 27, e2500. [Google Scholar] [CrossRef]
- Jiang, R.; Rui, X.; Wang, G.; Yang, F.; Zhu, W.; Wei, M. Design and modeling of an innovative magnetorheological fluid-elastomeric damper with compact structure. J. Intell. Mater. Syst. Struct. 2020, 31, 2088–2100. [Google Scholar] [CrossRef]
- Kwok, N.; Ha, Q.; Nguyen, M.; Li, J.; Samali, B. Bouc-Wen model parameter identification for a MR fluid damper using computationally efficient GA. ISA Trans. 2007, 46, 167–179. [Google Scholar] [CrossRef]
- Peng, Y.; Yang, J.; Li, J. Parameter identification of modified Bouc-Wen model and analysis of size effect of magnetorheological dampers. J. Intell. Mater. Syst. Struct. 2018, 29, 1464–1480. [Google Scholar] [CrossRef]
- Zhu, H.; Rui, X.; Yang, F.; Zhu, W.; Wei, M. An efficient parameters identification method of normalized Bouc-Wen model for MR damper. J. Sound Vib. 2019, 448, 146–158. [Google Scholar] [CrossRef]
- Jiang, Z.; Christenson, R. A comparison of 200 kN magneto-rheological damper models for use in real-time hybrid simulation pretesting. Smart Mater. Struct. 2011, 20, 065011. [Google Scholar] [CrossRef]
- Graczykowski, C.; Pawłowski, P. Exact physical model of magnetorheological damper. Appl. Math. Model. 2017, 47, 400–424. [Google Scholar] [CrossRef]
- Aguirre, N.; Ikhouane, F.; Rodellar, J.; Wagg, D.; Neild, S. Modeling and identification of a small scale magnetorheological damper. IFAC Proc. Vol. 2010, 43, 19–24. [Google Scholar] [CrossRef] [Green Version]
- Tsouroukdissian, A.R.; Ikhouane, F.; Rodellar, J.; Luo, N. Modeling and Identification of a Small-scale Magnetorheological Damper. J. Intell. Mater. Syst. Struct. 2009, 20, 825–835. [Google Scholar] [CrossRef]
- Bi, J.; Luo, L.; Jiang, N. Seismic energy response analysis of equipment-structure system via real-time dynamic substructuring shaking table testing. Adv. Struct. Eng. 2020, 23, 37–50. [Google Scholar] [CrossRef]
- Damcı, E.; Şekerci, Ç. Development of a low-cost single-axis shake table based on Arduino. Exp. Tech. 2019, 43, 179–198. [Google Scholar] [CrossRef]
- Wu, Q.; Yan, H.; Zhu, H.; Bai, X. Shaking table test study on the seismic isolation effect of a hybrid passive control system. Measurement 2020, 164, 108125. [Google Scholar] [CrossRef]
- Zhang, R.; Phillips, B.M.; Taniguchi, S.; Ikenaga, M.; Ikago, K. Shake table real-time hybrid simulation techniques for the performance evaluation of buildings with inter-story isolation. Struct. Control Health Monit. 2017, 24, e1971. [Google Scholar] [CrossRef]
- Xu, Z.D.; Zhao, Y.L.; Guo, Y.Q.; Yang, X.L.; Sarwar, W. Shaking table tests of magnetorheological damped frame to mitigate the response under real-time online control. Smart Mater. Struct. 2019, 28, 115021. [Google Scholar] [CrossRef]
- Li, Z.X.; Lv, Y.; Xu, L.H.; Ding, Y.; Zhao, Q. Experimental studies on nonlinear seismic control of a steel–concrete hybrid structure using MR dampers. Eng. Struct. 2013, 49, 248–263. [Google Scholar] [CrossRef]
- Asai, T.; Chang, C.M.; Spencer, B.F. Real-Time Hybrid Simulation of a Smart Base-Isolated Building. J. Eng. Mech. 2015, 141, 04014128. [Google Scholar] [CrossRef]
- Lu, K.C.; Loh, C.H.; Yang, J.N.; Lin, P.Y. Decentralized sliding mode control of a building using MR dampers. Smart Mater. Struct. 2008, 17, 055006. [Google Scholar] [CrossRef]
- Cho, S.W.; Kim, B.W.; Jung, H.J.; Lee, I.W. Implementation of Modal Control for Seismically Excited Structures using Magnetorheological Dampers. J. Eng. Mech. 2005, 131, 177–184. [Google Scholar] [CrossRef]
- Dyke, S.J.; Spencer, B.F.; Sain, M.K.; Carlson, J.D. An experimental study of MR dampers for seismic protection. Smart Mater. Struct. 1998, 7, 693–703. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Wang, J. Experimental investigation of the seismic control of a nonlinear soil-structure system using MR dampers. Smart Mater. Struct. 2011, 20, 085026. [Google Scholar] [CrossRef]
- Sahasrabudhe, S.; Nagarajaiah, S. Experimental Study of Sliding Base-Isolated Buildings with Magnetorheological Dampers in Near-Fault Earthquakes. J. Struct. Eng. 2005, 131, 1025–1034. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Gao, F.; Liao, W.H. Magnetorheological damper with multi-grooves on piston for damping force enhancement. Smart Mater. Struct. 2020, 30, 025007. [Google Scholar] [CrossRef]
- Yaghmaei-Sabegh, S.; Jafari-Koucheh, E.; Ebrahimi-Aghabagher, M. Estimating the seismic response of nonlinear structures equipped with nonlinear viscous damper subjected to pulse-like ground records. Structures 2020, 28, 1915–1923. [Google Scholar] [CrossRef]
- Kolbe, A.R.; Hutson, R.A.; Shannon, H.; Trzcinski, E.; Miles, B.; Levitz, N.; Puccio, M.; James, L.; Noel, J.R.; Muggah, R. Mortality, crime and access to basic needs before and after the Haiti earthquake: A random survey of Port-au-Prince households. Med. Confl. Surviv. 2010, 26, 281–297. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering, 4th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2012. [Google Scholar]
- Ismail, M.; Rodellar, J.; Pozo, F. Passive and hybrid mitigation of potential near-fault inner pounding of a self-braking seismic isolator. Soil Dyn. Earthq. Eng. 2015, 69, 233–250. [Google Scholar] [CrossRef] [Green Version]
- Craig, R.R., Jr.; Kurdila, A.J. Fundamentals of Structural Dynamics, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Wierschem, N.E.; Quinn, D.D.; Hubbard, S.A.; Al-Shudeifat, M.A.; McFarland, D.M.; Luo, J.; Fahnestock, L.A.; Spencer, B.F.; Vakakis, A.F.; Bergman, L.A. Passive damping enhancement of a two-degree-of-freedom system through a strongly nonlinear two-degree-of-freedom attachment. J. Sound Vib. 2012, 331, 5393–5407. [Google Scholar] [CrossRef]
- Vargas, A.N. Data, Source Code, and Documents for the Shaking Table with MR-Damper. 2021. Available online: https://github.com/labcontrol-data/mr-damper (accessed on 28 April 2022). [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input (V) | Amplit. (mm) | Frequency (Hz) | |||
|---|---|---|---|---|---|
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| Variable (Unity) | No MR Damper | Passive-Off | Passive-On |
|---|---|---|---|
| () | |||
| () | |||
| (/) | |||
| (/) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vargas, A.N.; Raminelli, J.G.; Montezuma, M.A.F.; Cavalini Junior, A.A.; Breganon, R.; Caruntu, C.F. Shaking Table Attached to Magnetorheological Damper: Simulation and Experiments for Structural Engineering. Sensors 2022, 22, 3644. https://doi.org/10.3390/s22103644
Vargas AN, Raminelli JG, Montezuma MAF, Cavalini Junior AA, Breganon R, Caruntu CF. Shaking Table Attached to Magnetorheological Damper: Simulation and Experiments for Structural Engineering. Sensors. 2022; 22(10):3644. https://doi.org/10.3390/s22103644
Chicago/Turabian StyleVargas, Alessandro N., João G. Raminelli, Marcio A. F. Montezuma, Aldemir Aparecido Cavalini Junior, Ricardo Breganon, and Constantin F. Caruntu. 2022. "Shaking Table Attached to Magnetorheological Damper: Simulation and Experiments for Structural Engineering" Sensors 22, no. 10: 3644. https://doi.org/10.3390/s22103644