
TIP4.0: Industrial Internet of Things Platform for Predictive Maintenance

 ,
,  , ,
, ,  ,
,  ,
,
Abstract
:1. Introduction
- A multi-purpose platform based on software and hardware components that can be selectively activated according to the deployment scenario requirements.
- A low profile software solution capable of running in hardware with reduced processing and memory power. By being based on the Yocto system, this feature allows TIP4.0 to be easily adapted to COTS or proprietary hardware.
- An industrial monitoring gateway for predictive maintenance scenarios with edge computing capabilities, local persistence storage, remote management and update features, and full autonomous operation even when disconnected from the main network.
- A modular, easily extensible software solution supporting multiple sensor and cloud protocols. Local and remote Application Programming Interface (API) interfaces are provided for the inclusion of new local and remote applications that extend TIP4.0’s functionality according to the requirements of new deployment scenarios.
- Solution developed in cooperation with an industrial monitoring service provider and product developer, making TIP4.0 aligned with the industry requirements and expectations.
- A feasibility study using the Edge TPU for running a PdM model based on neural networks with time series data.
2. Literature Review
2.1. Predictive Maintenance
Preparing a Predictive Maintenance Solution
- The failure should be predictable, and a plan of action should be available to avoid it once it is predicted.
- Domain experts capable of understanding the information referred in the previous point should be part of the solution development. Their involvement will be important to help data analysts to understand and interpret the data, as well as to identify which additional data should be collected to better characterise the problem.
- Only relevant data for the problem to predict should be included in the dataset, i.e., data not directly related with the problem or not important for the prediction purpose should not be present in the dataset. To ease the creation of a good dataset for PdM, the prediction should be focused on specific components, instead of larger subsystems. As mentioned above, the domain experts should be part of the solution development to help in the definition and creation of a good dataset for PdM.
- Having a dataset with sufficient data that represent the events to predict and its causes, if possible with multiple records of such events, is also important.
2.2. Edge Computing Gateways Suitable for IIoT
- Support for device protocols.
- Local persistence storage.
- Autonomous operation while disconnected.
- Remote management and update.
- Local applications.
- OpenAPI for remote applications.
- Analytics and machine learning.
- Rule Engine.
- Security and privacy.
- Availability and reliability.
- Device abstraction and digital twin.
3. Our Proposed TIP4.0
- Multiple algorithms running concurrently.
- Possibility to instantiate the same algorithm multiple times.
- User management and authentication layer is re-used from WGW4IIoT.
- Only system admins are allowed to make modifications to the database. All other users can only view the data.
- The system, software plus hardware, must be developed in such a way that it can be adapted in a modular manner for predictive maintenance with and without edge computing requirements. The objective is to reduce maintenance overhead by having a single solution based on modules/plugins that can be activated (or added in the case of hardware features) depending on the deployment scenario.
- On the fly algorithm updates, i.e., no need for operating system updates or a system reset.
- The hardware and software architecture should be ready for edge, edge+cloud, and cloud computing deployments.
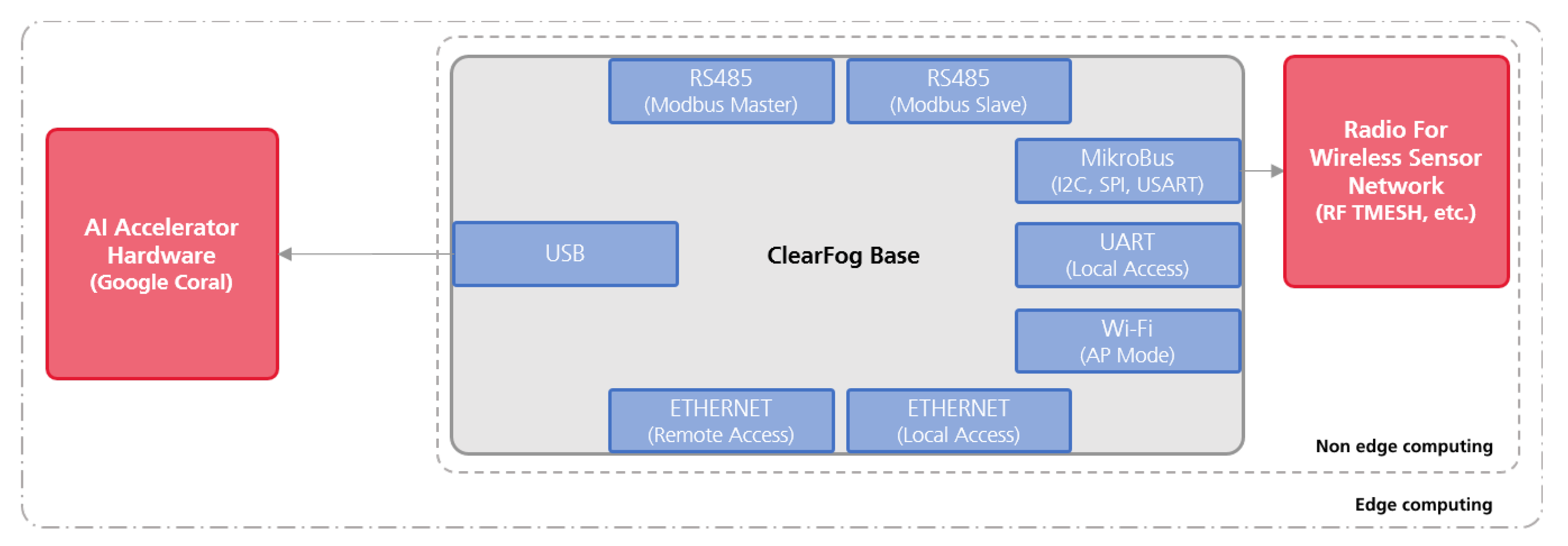
3.1. TIP4.0 Hardware Architecture
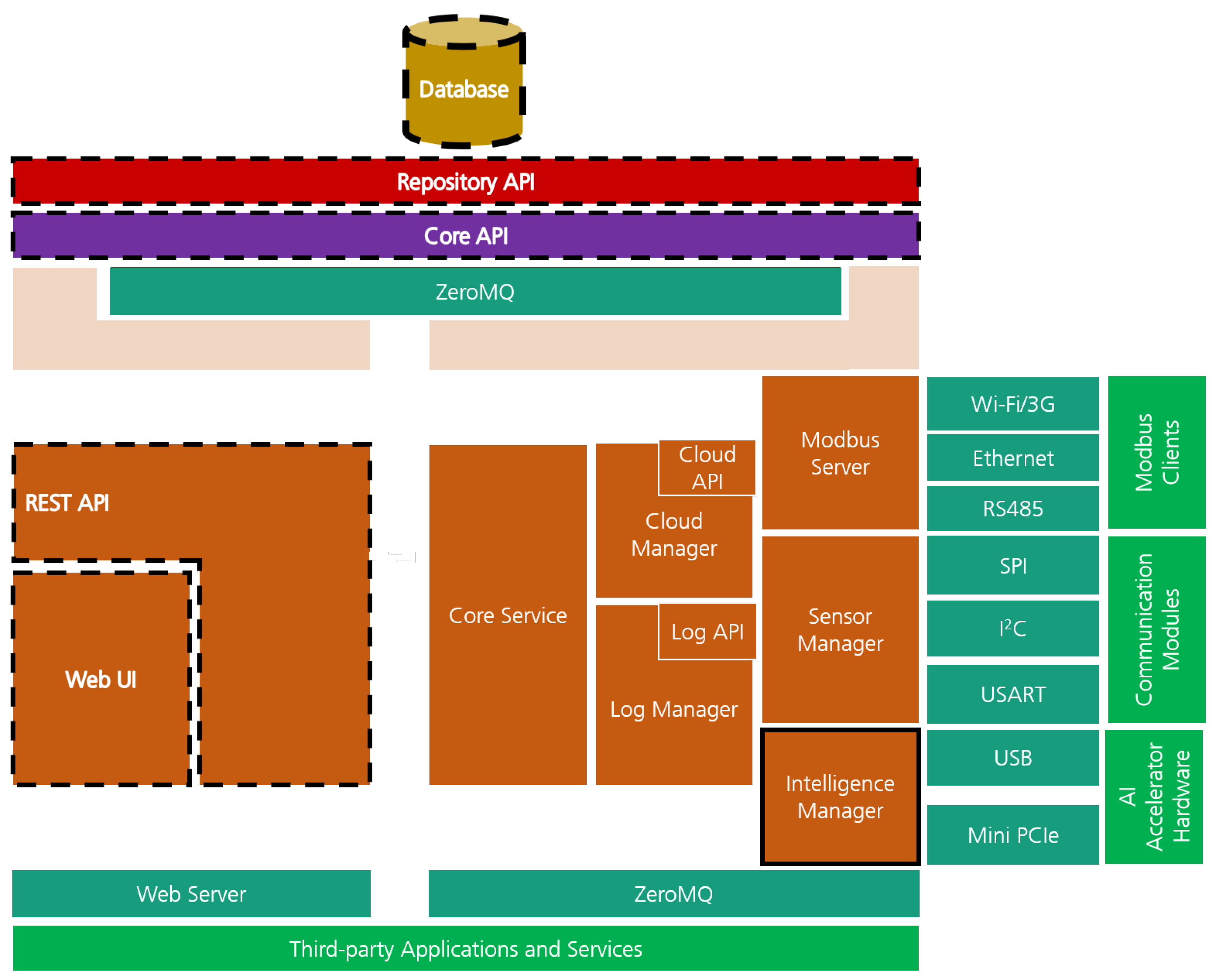
3.2. TIP4.0 Software Architecture
3.2.1. Updates to Database, Core API, Repository API, and Rest API
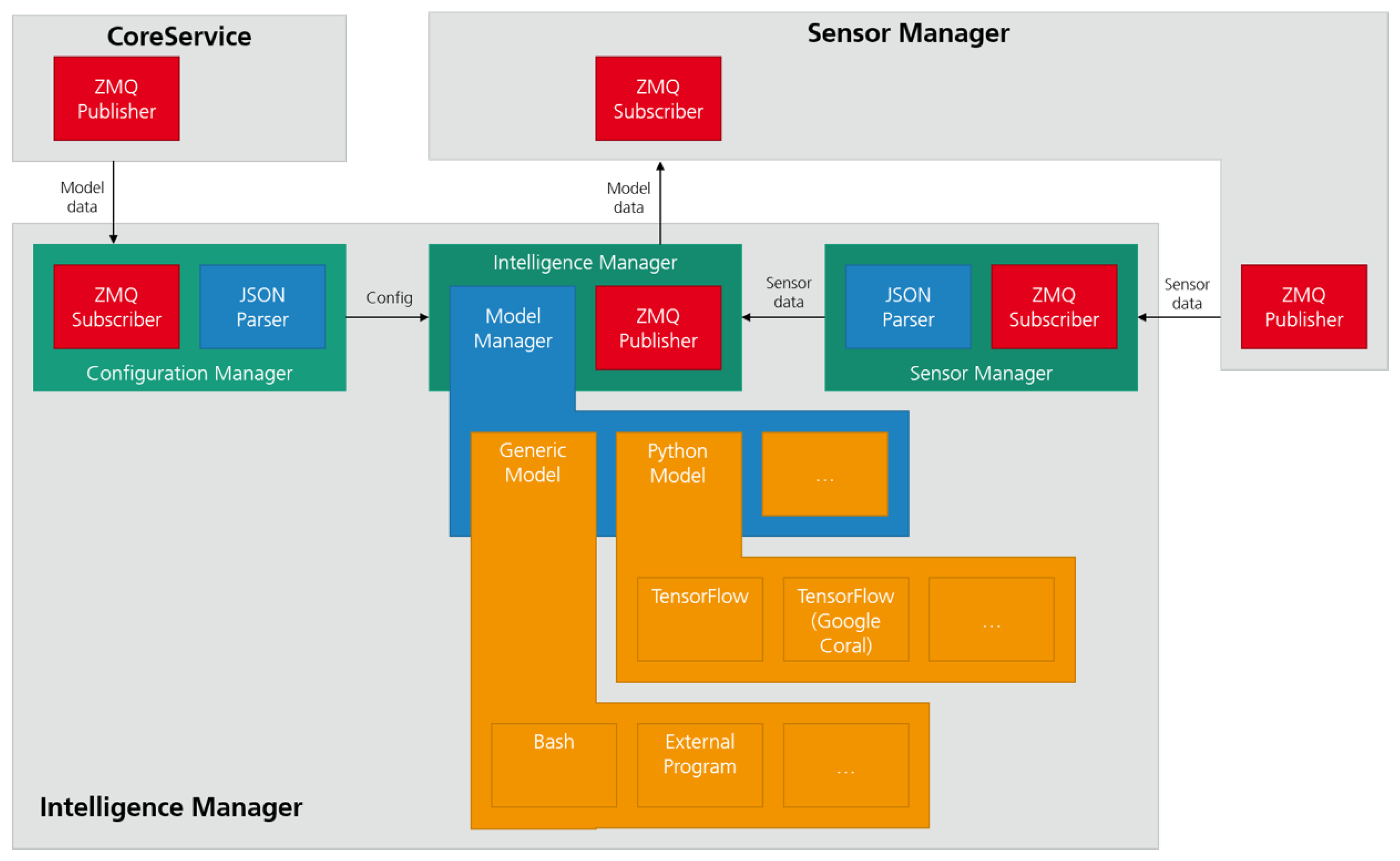
3.2.2. TIP4.0 Intelligence Manager
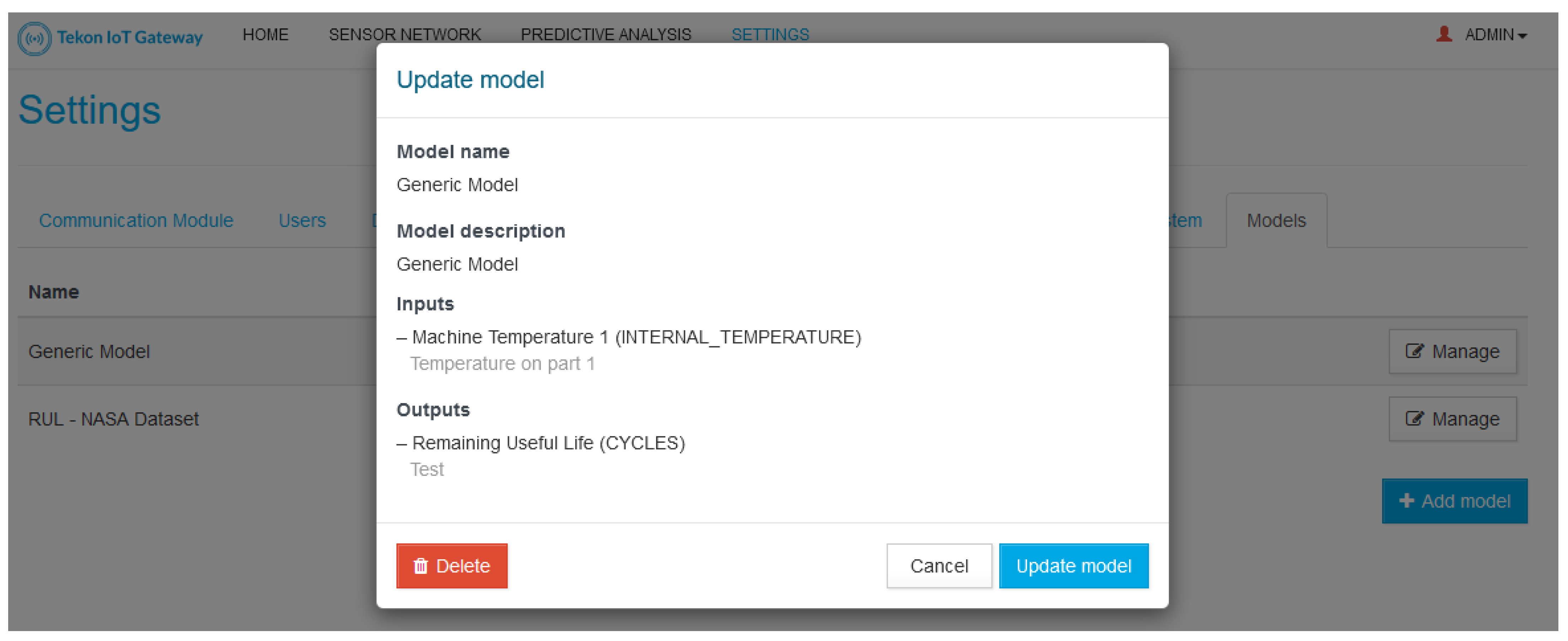
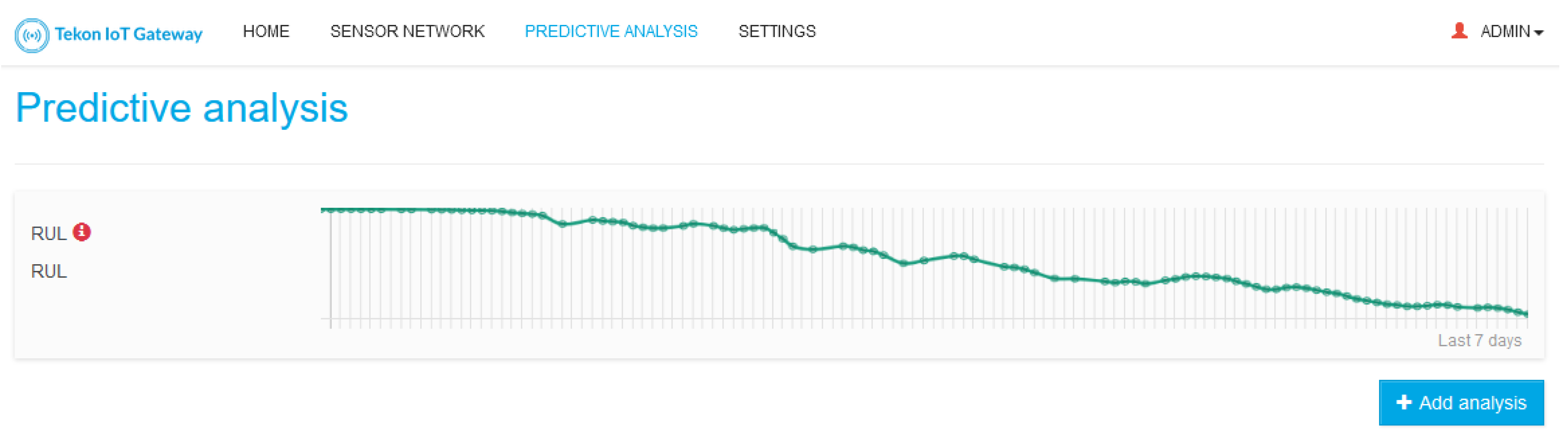
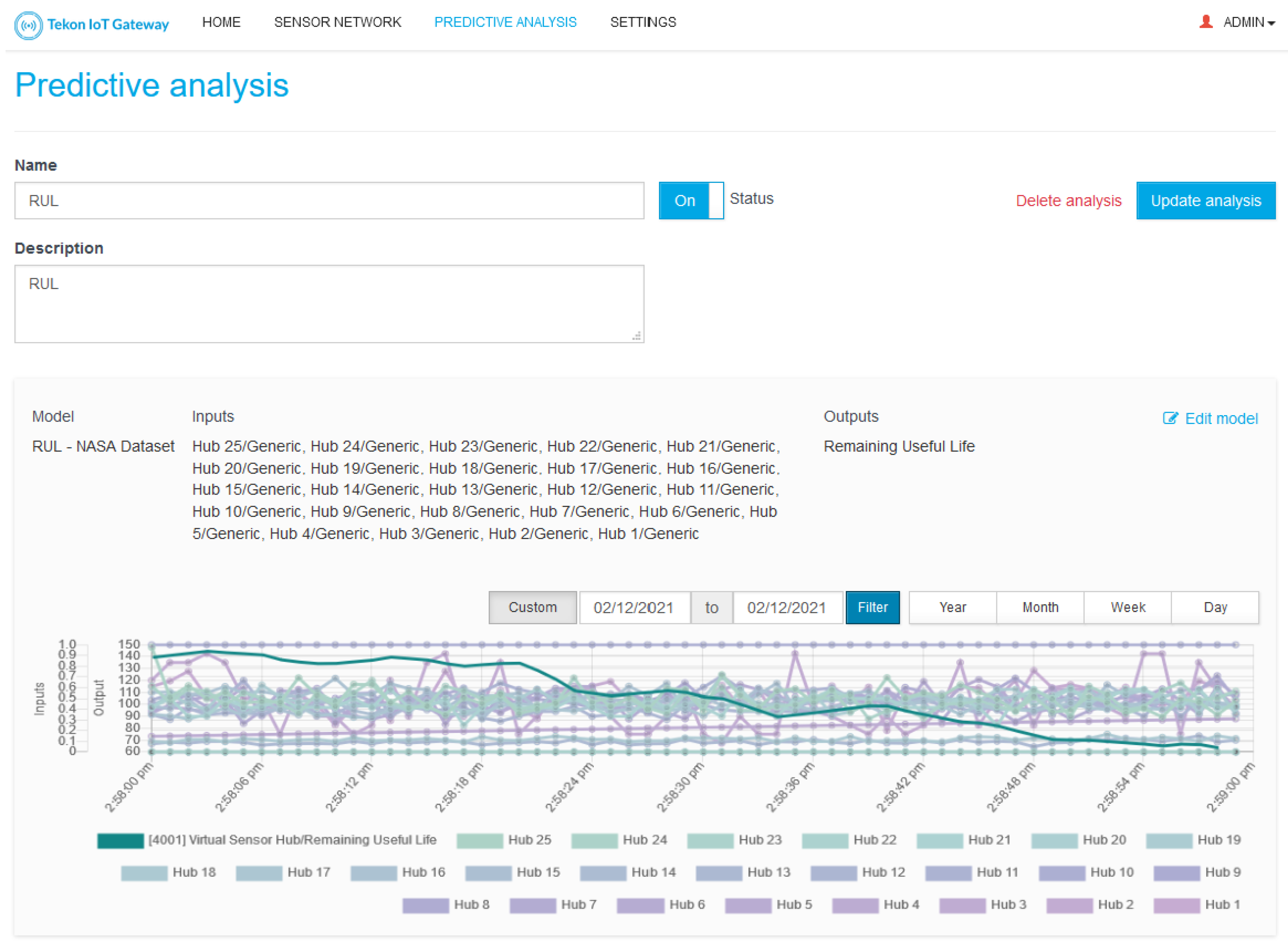
3.2.3. Web Portal and Interface
- A Model can only be deleted if it is not being used in Predictive Analysis. If the Model is already in use, the system will warn the user about that, and ask him to first delete the Predictive Analysis in which it is being used.
- Updating a Model to a new version replaces it for all Predictive Analysis where the Model is being used. To guarantee that the update will not break the Predictive Analysis already configured, the new Model is required to use the same inputs and expose the same outputs, i.e., the metadata of the new Model needs to be exactly the same as the metadata of the old model. Otherwise, no update is performed.
- The sensor-to-Model association is done per Model input, and, to guarantee that the Model will be correctly fed with data, the system only allows the association of sensors compatible with the selected Model input; therefore, incompatible sensors will not be displayed for selection.
- When deleting and updating the Predictive Analysis, a warning message is displayed to the user to guarantee that the update will not harm the system configuration.
4. Validation
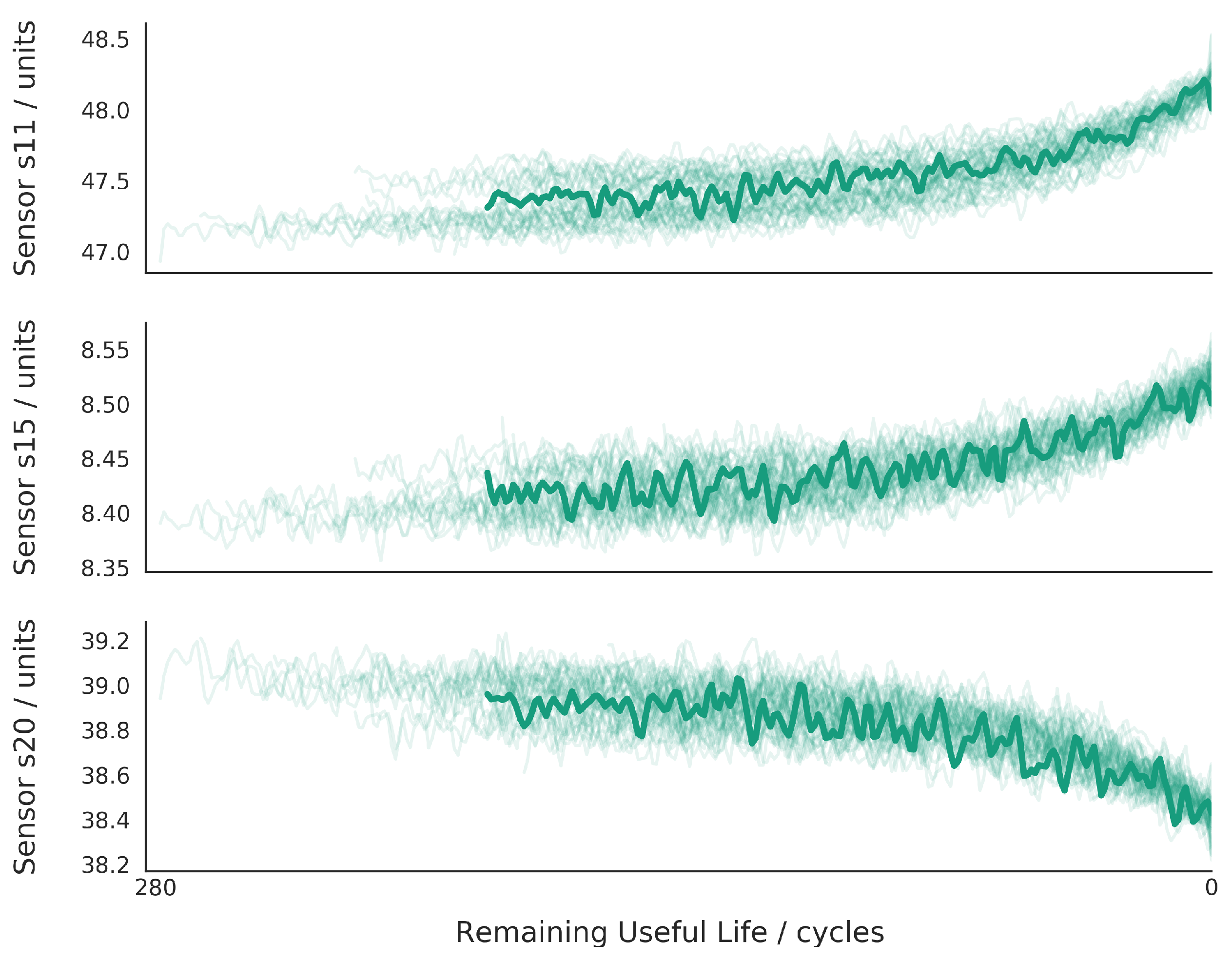
4.1. Dataset
4.2. Preprocessing
4.3. Model
4.3.1. Quantization
- Post-training quantization is applied after a complete model with float32 weights and activations is trained. The technique requires a representative dataset to be passed to allow the quantization process to measure the dynamic range of activations and inputs, which is critical to finding an accurate 8-bit representation of each weight and activation value. The process provides a scale and bias value, which are used to re-scale data to the int8 format [58]. After that, the model is compiled to the suitable format using the provided edgetpu_compiler to be read by the Edge TPU. The input values have to be re-scaled according to the following (Equation (1)) affine mapping of real numbers r to integers q:where the constants S and Z, correspond to the scale and bias, respectively.
- Quantization-aware training requires training a model that emulates the inference quantization loss during training. The inference process is identical to the post-training quantization and requires the input data to be converted to the int8 format.
4.3.2. Architecture
4.4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lu, Y. Industry 4.0: A survey on technologies, applications and open research issues. J. Ind. Inf. Integr. 2017, 6, 1–10. [Google Scholar] [CrossRef]
- Romeo, L.; Petitti, A.; Marani, R.; Milella, A. Internet of Robotic Things in Smart Domains: Applications and Challenges. Sensors 2020, 20, 3355. [Google Scholar] [CrossRef] [PubMed]
- Wan, J.; Tang, S.; Shu, Z.; Li, D.; Wang, S.; Imran, M.; Vasilakos, A.V. Software-Defined Industrial Internet of Things in the Context of Industry 4.0. IEEE Sens. J. 2016, 16, 7373–7380. [Google Scholar] [CrossRef]
- Xu, L.D.; He, W.; Li, S. Internet of Things in Industries: A Survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Civerchia, F.; Bocchino, S.; Salvadori, C.; Rossi, E.; Maggiani, L.; Petracca, M. Industrial Internet of Things monitoring solution for advanced predictive maintenance applications. Enterprise modelling and system integration for smart manufacturing. J. Ind. Inf. Integr. 2017, 7, 4–12. [Google Scholar] [CrossRef]
- Yan, J.; Meng, Y.; Lu, L.; Li, L. Industrial big data in an industry 4.0 environment: Challenges, schemes, and applications for predictive maintenance. IEEE Access 2017, 5, 23484–23491. [Google Scholar] [CrossRef]
- Sahal, R.; Breslin, J.G.; Ali, M.I. Big data and stream processing platforms for Industry 4.0 requirements mapping for a predictive maintenance use case. J. Manuf. Syst. 2020, 54, 138–151. [Google Scholar] [CrossRef]
- Cheng, J.C.; Chen, W.; Chen, K.; Wang, Q. Data-driven predictive maintenance planning framework for MEP components based on BIM and IoT using machine learning algorithms. Autom. Constr. 2020, 112, 103087. [Google Scholar] [CrossRef]
- Ruiz-Sarmiento, J.R.; Monroy, J.; Moreno, F.A.; Galindo, C.; Bonelo, J.M.; Gonzalez-Jimenez, J. A predictive model for the maintenance of industrial machinery in the context of industry 4.0. Eng. Appl. Artif. Intell. 2020, 87, 103289. [Google Scholar] [CrossRef]
- Ahmad, R.; Kamaruddin, S. An overview of time-based and condition-based maintenance in industrial application. Comput. Ind. Eng. 2012, 63, 135–149. [Google Scholar] [CrossRef]
- Mulders, M.; Haarman, M. Predictive Maintenance 4.0 beyond the Hype: PdM 4.0 Delivers Results. Available online: https://www.pwc.nl/en/insights-and-publications/services-and-industries/industrial-manufacturing/predictive-maintenance-4-0.html (accessed on 30 June 2020).
- Connel, T.; Boost Uptime and Revenue with Well-Integrated Predictive Maintenance. Intel White Paper. Available online: https://www.intel.com/content/www/us/en/industrial-automation/boost-uptime-revenue-predictive-maintenance-brief.html (accessed on 30 June 2020).
- Yaseen, M.; Swathi, D.; Kumar, T.A. IoT based condition monitoring of generators and predictive maintenance. In Proceedings of the 2017 2nd International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 19–20 October 2017; pp. 725–729. [Google Scholar]
- Kadechkar, A.; Riba, J.R.; Moreno-Eguilaz, M.; Perez, J. SmartConnector: A Self-Powered IoT Solution to Ease Predictive Maintenance in Substations. IEEE Sens. J. 2020, 20, 11632–11641. [Google Scholar] [CrossRef]
- Bhatter, S.; Verma, A.; Sinha, S. Application of IoT in Predictive Maintenance Using Long-Range Communication (LoRa). In Innovation in Electrical Power Engineering, Communication, and Computing Technology; Springer: Berlin/Heidelberg, Germany, 2020; pp. 147–155. [Google Scholar]
- Papcun, P.; Kajati, E.; Cupkova, D.; Mocnej, J.; Miskuf, M.; Zolotova, I. Edge-enabled IoT gateway criteria selection and evaluation. Concurr. Comput. Pract. Exp. 2020, 32, e5219. [Google Scholar] [CrossRef]
- Aheleroff, S.; Xu, X.; Lu, Y.; Aristizabal, M.; Velásquez, J.P.; Joa, B.; Valencia, Y. IoT-enabled smart appliances under industry 4.0: A case study. Adv. Eng. Inform. 2020, 43, 101043. [Google Scholar] [CrossRef]
- Compare, M.; Baraldi, P.; Zio, E. Challenges to IoT-Enabled Predictive Maintenance for Industry 4.0. IEEE Internet Things J. 2019, 7, 4585–4597. [Google Scholar] [CrossRef]
- Khan, W.Z.; Ahmed, E.; Hakak, S.; Yaqoob, I.; Ahmed, A. Edge computing: A survey. Future Gener. Comput. Syst. 2019, 97, 219–235. [Google Scholar] [CrossRef]
- Bose, S.K.; Kar, B.; Roy, M.; Gopalakrishnan, P.K.; Basu, A. ADEPOS: Anomaly detection based power saving for predictive maintenance using edge computing. In Proceedings of the 24th Asia and South Pacific Design Automation Conference, Tokyo, Japan, 21–24 January 2019; pp. 597–602. [Google Scholar]
- Sun, W.; Liu, J.; Yue, Y. AI-enhanced offloading in edge computing: When machine learning meets industrial IoT. IEEE Netw. 2019, 33, 68–74. [Google Scholar] [CrossRef]
- Resende, C.; Monteiro, M.; Oliveira, J.; Moreira, W.; Cavaleiro, A.; Silva, R.; Carvalho, R. WGW4IIoT: Wireless Gateway for Industrial IoT. In Proceedings of the 2018 IEEE Symposium on Computers and Communications (ISCC), Natal, Brazil, 25–28 June 2018; pp. 01108–01113. [Google Scholar]
- Google LLC. Coral. Available online: https://coral.ai/ (accessed on 30 June 2020).
- Wang, H. A survey of maintenance policies of deteriorating systems. Eur. J. Oper. Res. 2002, 139, 469–489. [Google Scholar] [CrossRef]
- Selcuk, S. Predictive maintenance, its implementation and latest trends. Proc. Inst. Mech. Eng. Part J. Eng. Manuf. 2017, 231, 1670–1679. [Google Scholar] [CrossRef]
- Mckone, K.E.; Weiss, E.N. Guidelines for Implementing Predictive Maintenance. Prod. Oper. Manag. 2002, 11, 109–124. [Google Scholar] [CrossRef]
- Zonta, T.; da Costa, C.A.; da Rosa Righi, R.; de Lima, M.J.; da Trindade, E.S.; Li, G.P. Predictive maintenance in the Industry 4.0: A systematic literature review. Comput. Ind. Eng. 2020, 150, 106889. [Google Scholar] [CrossRef]
- Carvalho, T.P.; Soares, F.A.A.M.N.; Vita, R.; Francisco, R.d.P.; Basto, J.P.; Alcalá, S.G.S. A systematic literature review of machine learning methods applied to predictive maintenance. Comput. Ind. Eng. 2019, 137, 106024. [Google Scholar] [CrossRef]
- Mohammadi, M.; Al-Fuqaha, A.; Sorour, S.; Guizani, M. Deep Learning for IoT Big Data and Streaming Analytics: A Survey. IEEE Commun. Surv. Tutor. 2018, 20, 2923–2960. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Ding, Q.; Sun, J.Q. Remaining useful life estimation in prognostics using deep convolution neural networks. Reliab. Eng. Syst. Saf. 2018, 172, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Zhao, W.; Zhang, Y.; Zio, E. Remaining useful life prediction using multi-scale deep convolutional neural network. Appl. Soft Comput. 2020, 89, 106113. [Google Scholar] [CrossRef]
- Shi, Z.; Chehade, A. A dual-LSTM framework combining change point detection and remaining useful life prediction. Reliab. Eng. Syst. Saf. 2021, 205, 107257. [Google Scholar] [CrossRef]
- Al-Dulaimi, A.; Zabihi, S.; Asif, A.; Mohammadi, A. A multimodal and hybrid deep neural network model for Remaining Useful Life estimation. Comput. Ind. 2019, 108, 186–196. [Google Scholar] [CrossRef]
- Hart, D. Implementing a Best Practices Predictive Maintenance Program: Avoiding the 10 Most Common Pitfalls; Technical Report; Emerson: Irving, TX, USA, 2008. [Google Scholar]
- Microsoft. Azure AI Guide for Predictive Maintenance Solutions—Team Data Science Process. Available online: https://docs.microsoft.com/en-us/azure/machine-learning/team-data-science-process/cortana-analytics-playbook-predictive-maintenance (accessed on 30 June 2020).
- LimbleCMMS LLC. A Complete Guide to Predictive Maintenance. Available online: https://limblecmms.com/blog/predictive-maintenance/ (accessed on 30 June 2020).
- Seebo Interactive LTD. IoT Resources—The Complete IoT & Industry 4.0 Knowledge Library. Available online: https://www.seebo.com/predictive-maintenance/ (accessed on 30 June 2020).
- GmbH, B.S.I. Edge Computing for IoT: A Guide on How Edge Computing Complements the Cloud in IoT. Available online: https://bosch.io/resources/white-paper/iot-edge-computing/ (accessed on 30 June 2020).
- Yu, W.; Liang, F.; He, X.; Hatcher, W.G.; Lu, C.; Lin, J.; Yang, X. A Survey on the Edge Computing for the Internet of Things. IEEE Access 2018, 6, 6900–6919. [Google Scholar] [CrossRef]
- Yli-Ojanperä, M.; Sierla, S.; Papakonstantinou, N.; Vyatkin, V. Adapting an agile manufacturing concept to the reference architecture model industry 4.0: A survey and case study. J. Ind. Inf. Integr. 2019, 15, 147–160. [Google Scholar] [CrossRef]
- Cerquitelli, T.; Bowden, D.; Marguglio, A.; Morabito, L.; Napione, C.; Panicucci, S.; Nikolakis, N.; Makris, S.; Coppo, G.; Andolina, S.; et al. A Fog Computing Approach for Predictive Maintenance. In Advanced Information Systems Engineering Workshops; Proper, H.A., Stirna, J., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 139–147. [Google Scholar]
- Short, M.; Twiddle, J. An Industrial Digitalization Platform for Condition Monitoring and Predictive Maintenance of Pumping Equipment. Sensors 2019, 19, 3781. [Google Scholar] [CrossRef] [Green Version]
- Yamato, Y.; Kumazaki, H.; Fukumoto, Y. Proposal of Lambda Architecture Adoption for Real Time Predictive Maintenance. In Proceedings of the 2016 Fourth International Symposium on Computing and Networking (CANDAR), Hiroshima, Japan, 22–25 November 2016; pp. 713–715. [Google Scholar]
- Lojka, T.; Miškuf, M.; Zolotová, I. Industrial IoT Gateway with Machine Learning for Smart Manufacturing. In Advances in Production Management Systems. Initiatives for a Sustainable World, Proceedings of the IFIP International Conference on Advances in Production Management Systems (APMS), Iguassu Falls, Brazil, 3–7 September 2016; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Zolotová, I.; Bundzel, M.; Lojka, T. Industry IoT Gateway for Cloud Connectivity. In Proceedings of the IFIP International Conference on Advances in Production Management, Tokyo, Japan, 7–9 September 2015. [Google Scholar]
- Crăciunescu, M.; Chenaru, O.; Dobrescu, R.; Florea, G.; Mocanu, Ş. IIoT Gateway for Edge Computing Applications. In Service Oriented, Holonic and Multi-Agent Manufacturing Systems for Industry of the Future; Borangiu, T., Trentesaux, D., Leitão, P., Giret Boggino, A., Botti, V., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 220–231. [Google Scholar]
- Alam, M.; Rufino, J.; Ferreira, J.; Ahmed, S.H.; Shah, N.; Chen, Y. Orchestration of Microservices for IoT Using Docker and Edge Computing. IEEE Commun. Mag. 2018, 56, 118–123. [Google Scholar] [CrossRef]
- Zhong, C.; Zhu, Z.; Huang, R. Study on the IOT Architecture and Gateway Technology. In Proceedings of the 2015 14th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Guiyang, China, 18–24 August 2015; pp. 196–199. [Google Scholar]
- Kang, B.; Kim, D.; Choo, H. Internet of Everything: A Large-Scale Autonomic IoT Gateway. IEEE Trans. Multi-Scale Comput. Syst. 2017, 3, 206–214. [Google Scholar] [CrossRef]
- Rahmani, A.M.; Gia, T.N.; Negash, B.; Anzanpour, A.; Azimi, I.; Jiang, M.; Liljeberg, P. Exploiting smart e-Health gateways at the edge of healthcare Internet-of-Things: A fog computing approach. Future Gener. Comput. Syst. 2018, 78, 641–658. [Google Scholar] [CrossRef]
- Sittón-Candanedo, I.; Alonso, R.S.; Corchado, J.M.; Rodríguez-González, S.; Casado-Vara, R. A review of edge computing reference architectures and a new global edge proposal. Future Gener. Comput. Syst. 2019, 99, 278–294. [Google Scholar] [CrossRef]
- SolidRun Ltd. Clear Fog—Fog Computing SBC. Available online: hhttps://www.solid-run.com/marvell-armada-family/clearfog/ (accessed on 30 June 2020).
- NVIDIA Corporation. Embedded Systems for Next-Generation Autonomous Machines. Available online: https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/ (accessed on 30 June 2020).
- Intel Corporation. Intel Neural Compute Stick 2 (Intel NCS2). Available online: https://software.intel.com/content/www/us/en/develop/hardware/neural-compute-stick.html (accessed on 30 June 2020).
- Sipeed. A IoT Edge Computing Solution. Available online: https://www.sipeed.com/solution.html (accessed on 30 June 2020).
- Susto, G.A.; Beghi, A. Dealing with time-series data in Predictive Maintenance problems. In Proceedings of the 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA), Berlin, Germany, 6–9 September 2016; pp. 1–4. [Google Scholar]
- Saxena, A.; Goebel, K. Turbofan Engine Degradation Simulation Data Set. Available online: https://data.nasa.gov/dataset/Turbofan-engine-degradation-simulation-data-set/vrks-gjie (accessed on 30 June 2020).
- Jacob, B.; Kligys, S.; Chen, B.; Zhu, M.; Tang, M.; Howard, A.G.; Adam, H.; Kalenichenko, D. Quantization and Training of Neural Networks for Efficient Integer-Arithmetic-Only Inference. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 2704–2713. [Google Scholar]
- Glorot, X.; Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proceedings of the 13th International Conference on Artificial Intelligence and Statistics, Proceedings of Machine Learning Research, Sardinia, Italy, 13–15 May 2010; Teh, Y.W., Titterington, M., Eds.; PMLR: Chia Laguna Resort, Italy, 2010; Volume 9, pp. 249–256. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference on Learning Representations, ICLR, Conference Track Proceedings, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Sateesh Babu, G.; Zhao, P.; Li, X.L. Deep Convolutional Neural Network Based Regression Approach for Estimation of Remaining Useful Life. In Database Systems for Advanced Applications; Navathe, S.B., Wu, W., Shekhar, S., Du, X., Wang, X.S., Xiong, H., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 214–228. [Google Scholar]
- Zheng, S.; Ristovski, K.; Farahat, A.; Gupta, C. Long Short-Term Memory Network for Remaining Useful Life estimation. In Proceedings of the 2017 IEEE International Conference on Prognostics and HealthManagement (ICPHM), Dallas, TX, USA, 19–21 June 2017; pp. 88–95. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, P.; Yan, R.; Gao, R.X. Long short-term memory for machine remaining life prediction. Special Issue on Smart Manufacturing. J. Manuf. Syst. 2018, 48, 78–86. [Google Scholar] [CrossRef]
- Zhang, C.; Pin, L.; Qin, A.; Tan, K. Multiobjective Deep Belief Networks Ensemble for Remaining Useful Life Estimation in Prognostics. IEEE Trans. Neural Netw. Learn. Syst. 2016, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Listou Ellefsen, A.; Bjørlykhaug, E.; Æsøy, V.; Ushakov, S.; Zhang, H. Remaining useful life predictions for turbofan engine degradation using semi-supervised deep architecture. Reliab. Eng. Syst. Saf. 2019, 183, 240–251. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Model | RMSE (Cycles) | MAPE (%) | Inference Time (s) |
|---|---|---|---|---|
| Type of Model (Device) | ± | ± | ± | |
| Full Model (GPU) | 17.03 ± 0.36 | 18.99 ± 0.55 | 19.21 ± 0.33 | |
| Full Model (CPU) | 17.03 ± 0.36 | 18.99 ± 0.55 | 32.41 ± 1.84 | |
| RUL001 | tflite (CPU) | 17.03 ± 0.36 | 18.99 ± 0.55 | 21.19 ± 0.65 |
| tflite-Post Quantization (Edge TPU) | 17.03 ± 0.25 | 19.09 ± 0.48 | 7.23 ± 0.43 | |
| tflite-Quantization Aware (Edge TPU) | 16.80 ± 1.16 | 18.13 ± 1.47 | 6.94 ± 0.38 | |
| Full Model (GPU) | 23.63 ± 0.68 | 29.04 ± 0.59 | 36.63 ± 0.70 | |
| Full Model (CPU) | 23.63 ± 0.68 | 29.04 ± 0.59 | 63.46 ± 3.25 | |
| RUL002 | tflite (CPU) | 23.63 ± 0.68 | 29.04 ± 0.59 | 24.15 ± 1.42 |
| tflite-Post Quantization (Edge TPU) | 23.80 ± 0.81 | 29.03 ± 0.55 | 17.90 ± 0.77 | |
| tflite-Quantization Aware (Edge TPU) | 24.42 ± 1.69 | 29.85 ± 1.83 | 17.60 ± 0.68 | |
| Full Model (GPU) | 15.55 ± 0.41 | 15.08 ± 0.65 | 19.85 ± 0.39 | |
| Full Model (CPU) | 15.55 ± 0.41 | 15.08 ± 0.65 | 46.96 ± 2.63 | |
| RUL003 | tflite (CPU) | 15.55 ± 0.41 | 15.08 ± 0.65 | 26.91 ± 1.28 |
| tflite-Post Quantization (Edge TPU) | 15.56 ± 0.37 | 15.15 ± 0.60 | 10.51 ± 0.46 | |
| tflite-Quantization Aware (Edge TPU) | 14.88 ± 0.91 | 14.21 ± 1.16 | 10.21 ± 0.60 | |
| Full Model (GPU) | 23.34 ± 0.63 | 26.18 ± 0.63 | 48.84 ± 1.96 | |
| Full Model (CPU) | 23.34 ± 0.63 | 26.18 ± 0.63 | 75.78 ± 3.74 | |
| RUL004 | tflite (CPU) | 23.34 ± 0.63 | 26.18 ± 0.63 | 26.45 ± 1.83 |
| tflite-Post Quantization (Edge TPU) | 23.37 ± 0.65 | 26.21 ± 0.65 | 22.60 ± 0.99 | |
| tflite-Quantization Aware (Edge TPU) | 23.63 ± 0.96 | 26.27 ± 0.86 | 22.16 ± 0.86 |
| RUL001 | RUL002 | RUL003 | RUL004 | |
|---|---|---|---|---|
| TensorFlow (full model) | 662 | 659 | 662 | 659 |
| Tensorflow Lite | 205 | 204 | 205 | 204 |
| Quantized Tensorflow Lite | 58 | 58 | 58 | 58 |
| Edge TPU | 121 | 469 | 1045 | 469 |
| Dataset | Model | RMSE (Cycles) | MAPE (%) | Inference Time (s) |
|---|---|---|---|---|
| Type of Model (Device) | ± | ± | ± | |
| RUL001 | tflite (CPU) | 19.18 ± 0.76 | 17.22 ± 0.68 | 183.10 ± 1.43 |
| tflite - Post Quantization (Edge TPU) | 19.32 ± 0.74 | 17.26 ± 0.64 | 16.70 ± 0.06 | |
| tflite - Quantization Aware (Edge TPU) | 18.13 ± 1.45 | 16.80 ± 1.14 | 16.98 ± 0.08 | |
| RUL002 | tflite (CPU) | 29.04 ± 0.57 | 23.63 ± 0.67 | 293.61 ± 0.54 |
| tflite - Post Quantization (Edge TPU) | 29.03 ± 0.55 | 23.80 ± 0.81 | 44.60 ± 0.22 | |
| tflite - Quantization Aware (Edge TPU) | 30.58 ± 4.16 | 25.39 ± 4.44 | 45.29 ± 0.18 | |
| RUL003 | tflite (CPU) | 15.30 ± 1.06 | 15.76 ± 0.89 | 226.26 ± 0.32 |
| tflite - Post Quantization (Edge TPU) | 12.05 ± 0.48 | 13.20 ± 0.42 | 23.68 ± 0.11 | |
| tflite - Quantization Aware (Edge TPU) | 14.39 ± 1.33 | 15.04 ± 1.06 | 23.67 ± 0.10 | |
| RUL004 | tflite (CPU) | 26.18 ± 0.62 | 23.34 ± 0.62 | 368.13 ± 0.58 |
| tflite - Post Quantization (Edge TPU) | 26.21 ± 0.65 | 23.37 ± 0.65 | 56.79 ± 0.22 | |
| tflite - Quantization Aware (Edge TPU) | 26.38 ± 1.02 | 23.81 ± 1.31 | 57.58 ± 0.26 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Resende, C.; Folgado, D.; Oliveira, J.; Franco, B.; Moreira, W.; Oliveira-Jr, A.; Cavaleiro, A.; Carvalho, R. TIP4.0: Industrial Internet of Things Platform for Predictive Maintenance. Sensors 2021, 21, 4676. https://doi.org/10.3390/s21144676
Resende C, Folgado D, Oliveira J, Franco B, Moreira W, Oliveira-Jr A, Cavaleiro A, Carvalho R. TIP4.0: Industrial Internet of Things Platform for Predictive Maintenance. Sensors. 2021; 21(14):4676. https://doi.org/10.3390/s21144676
Chicago/Turabian StyleResende, Carlos, Duarte Folgado, João Oliveira, Bernardo Franco, Waldir Moreira, Antonio Oliveira-Jr, Armando Cavaleiro, and Ricardo Carvalho. 2021. "TIP4.0: Industrial Internet of Things Platform for Predictive Maintenance" Sensors 21, no. 14: 4676. https://doi.org/10.3390/s21144676