
Research Trends and Future Perspectives in Marine Biomimicking Robotics

 , ,
, ,  ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Database Search
2.2. Bibliometric Mapping and Clustering
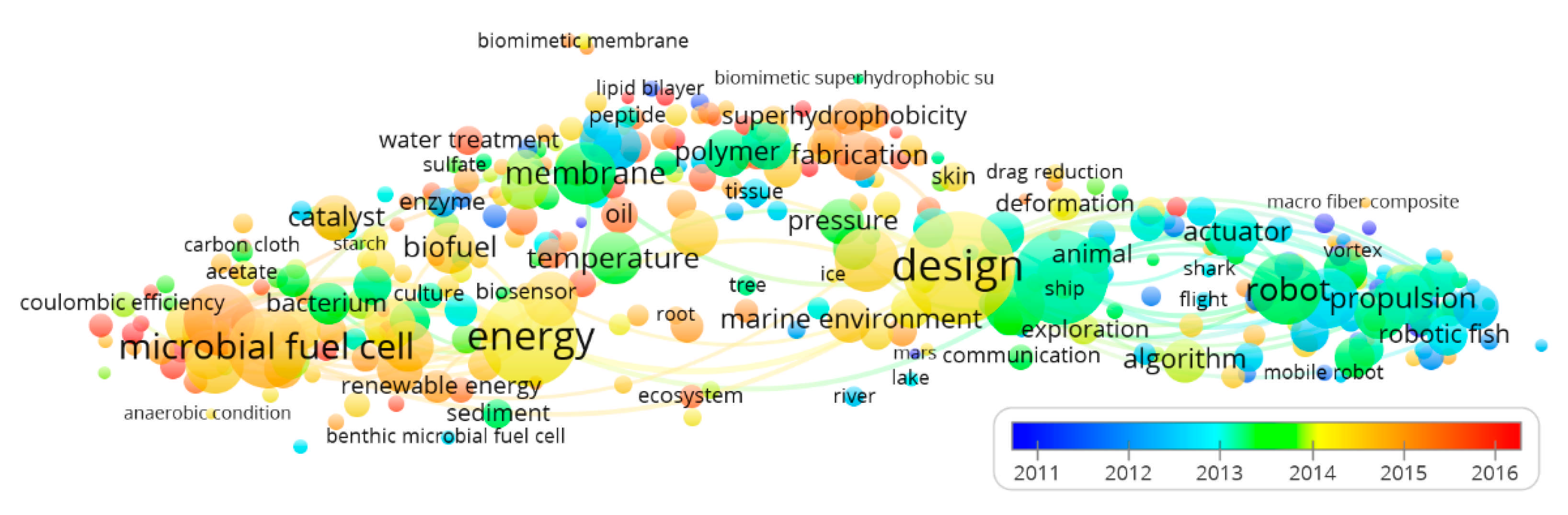
2.3. The Term-Year Map
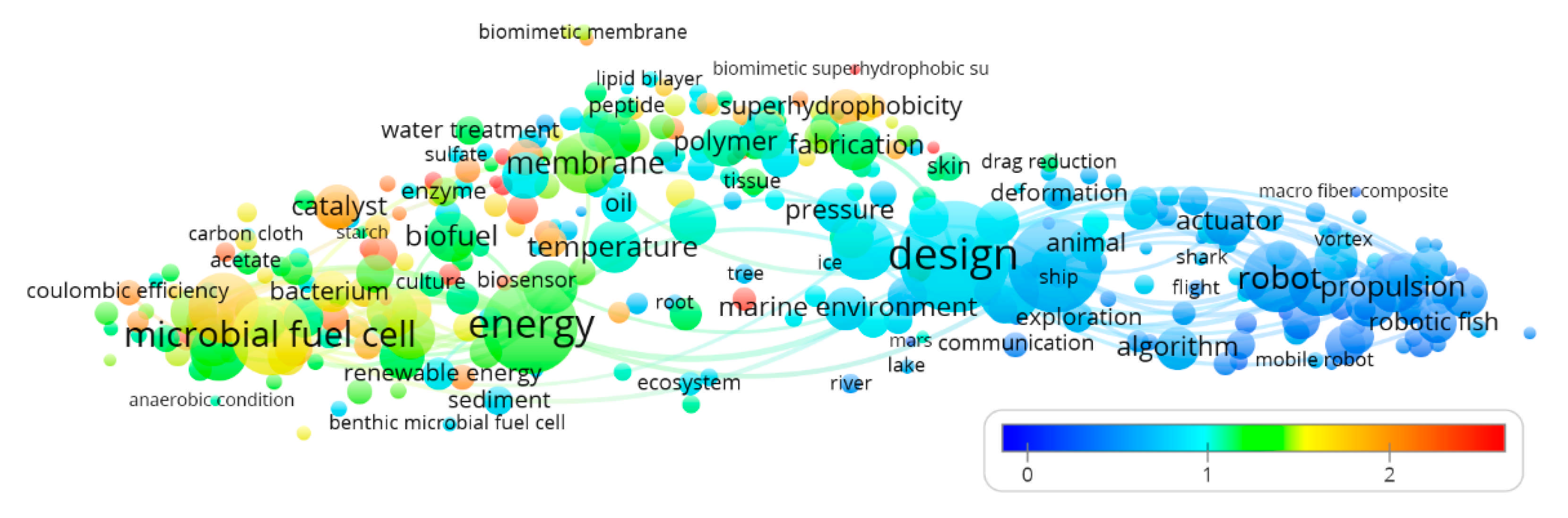
2.4. The Term-Citation Map
2.5. Statistical Analyses
3. Results
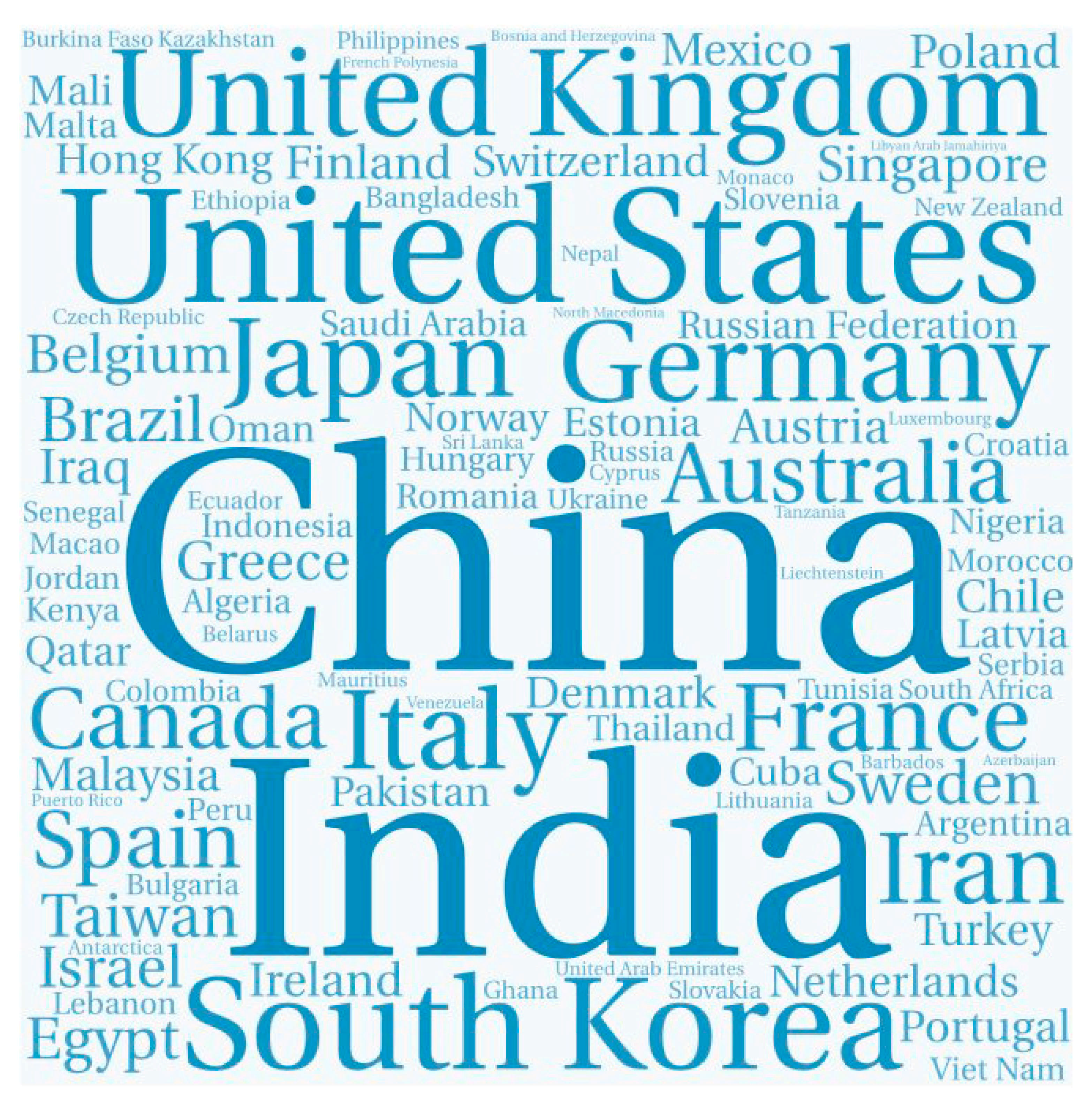
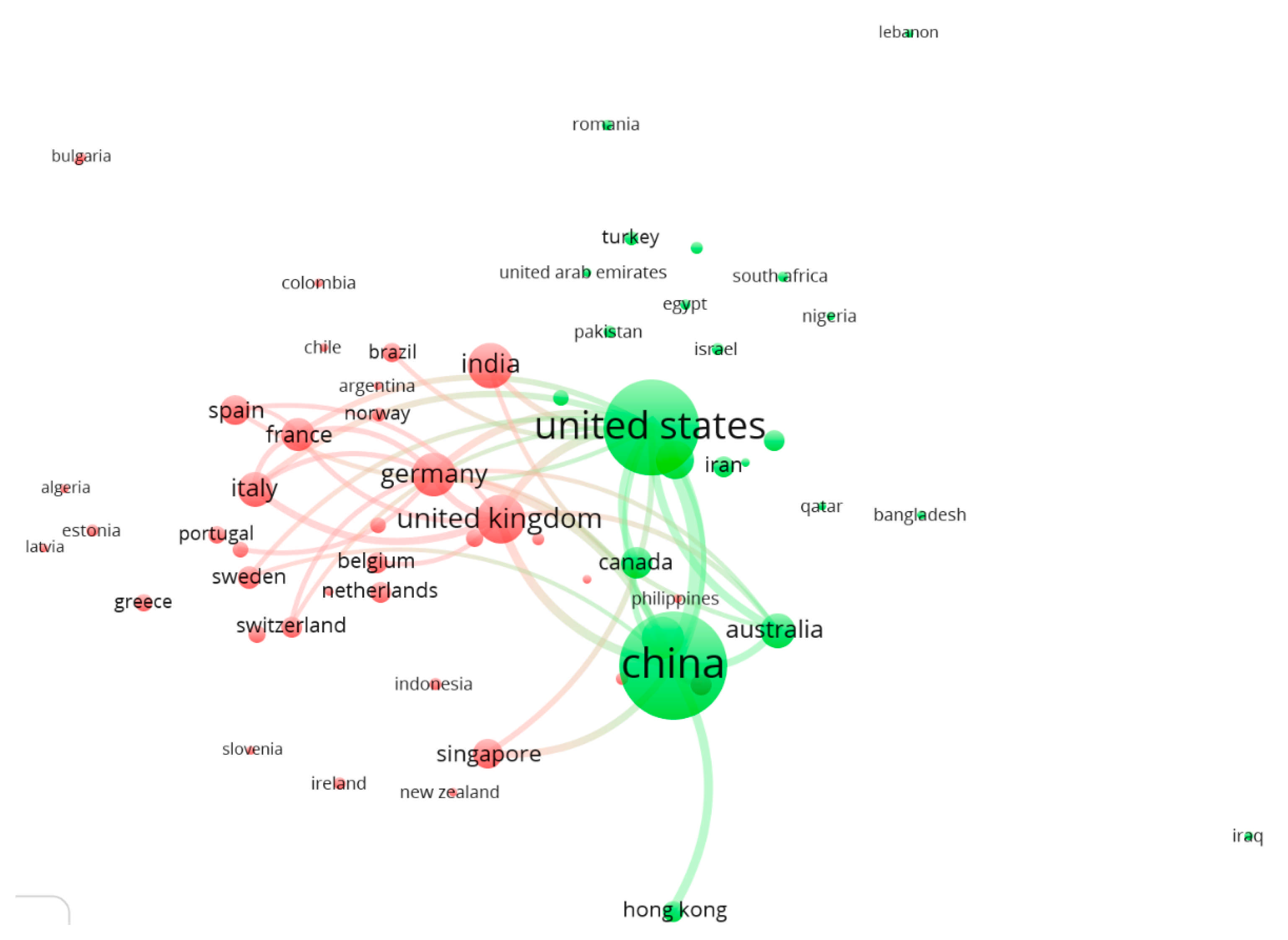
3.1. Journals, Subject Categories and Countries
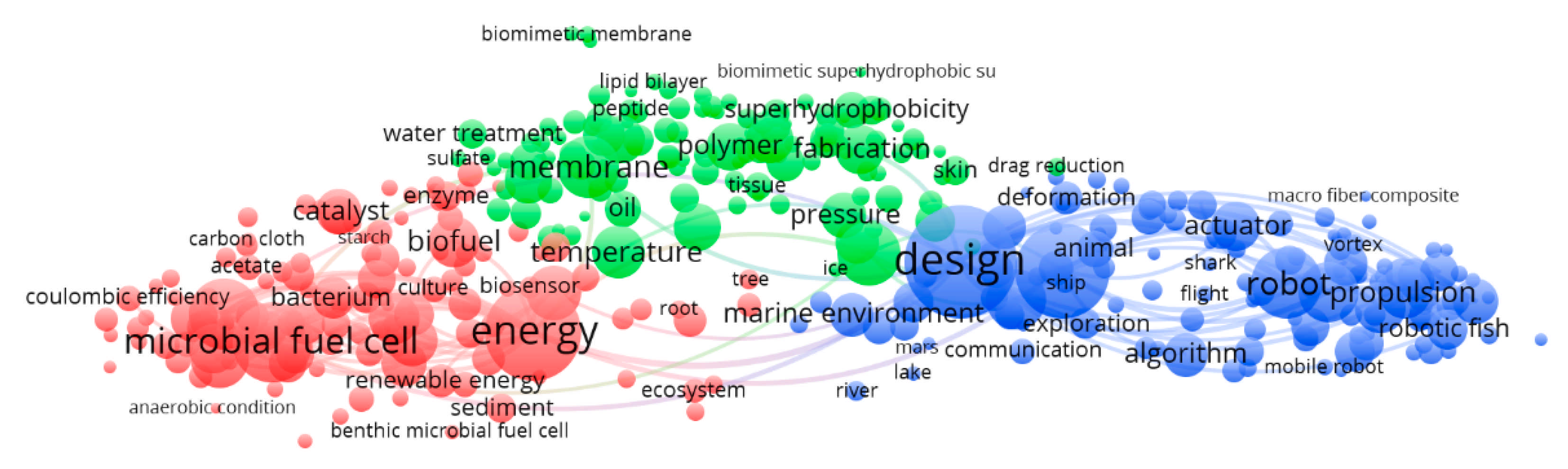
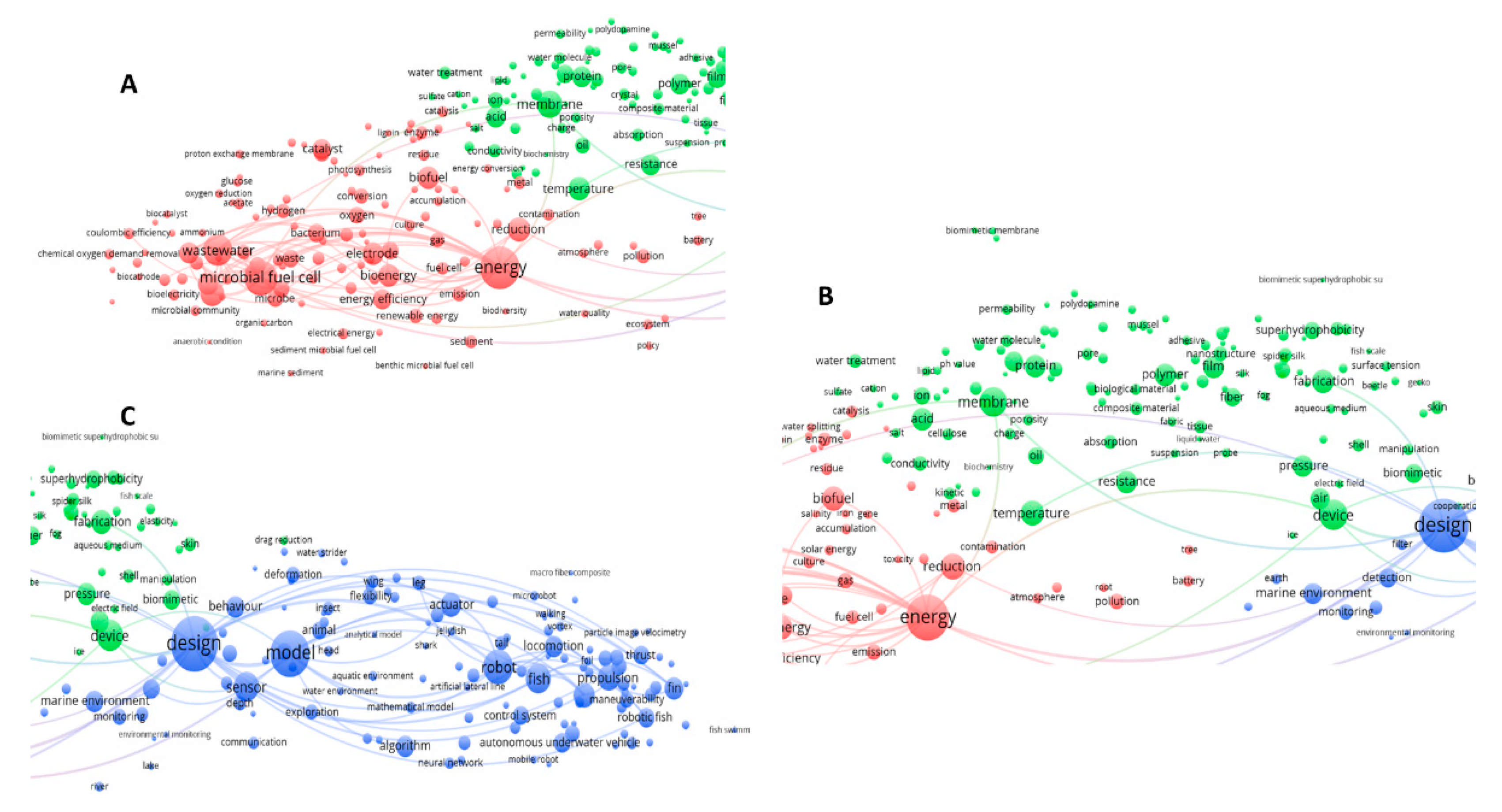
3.2. The Term-Clustering Map Identifying Major Research Areas
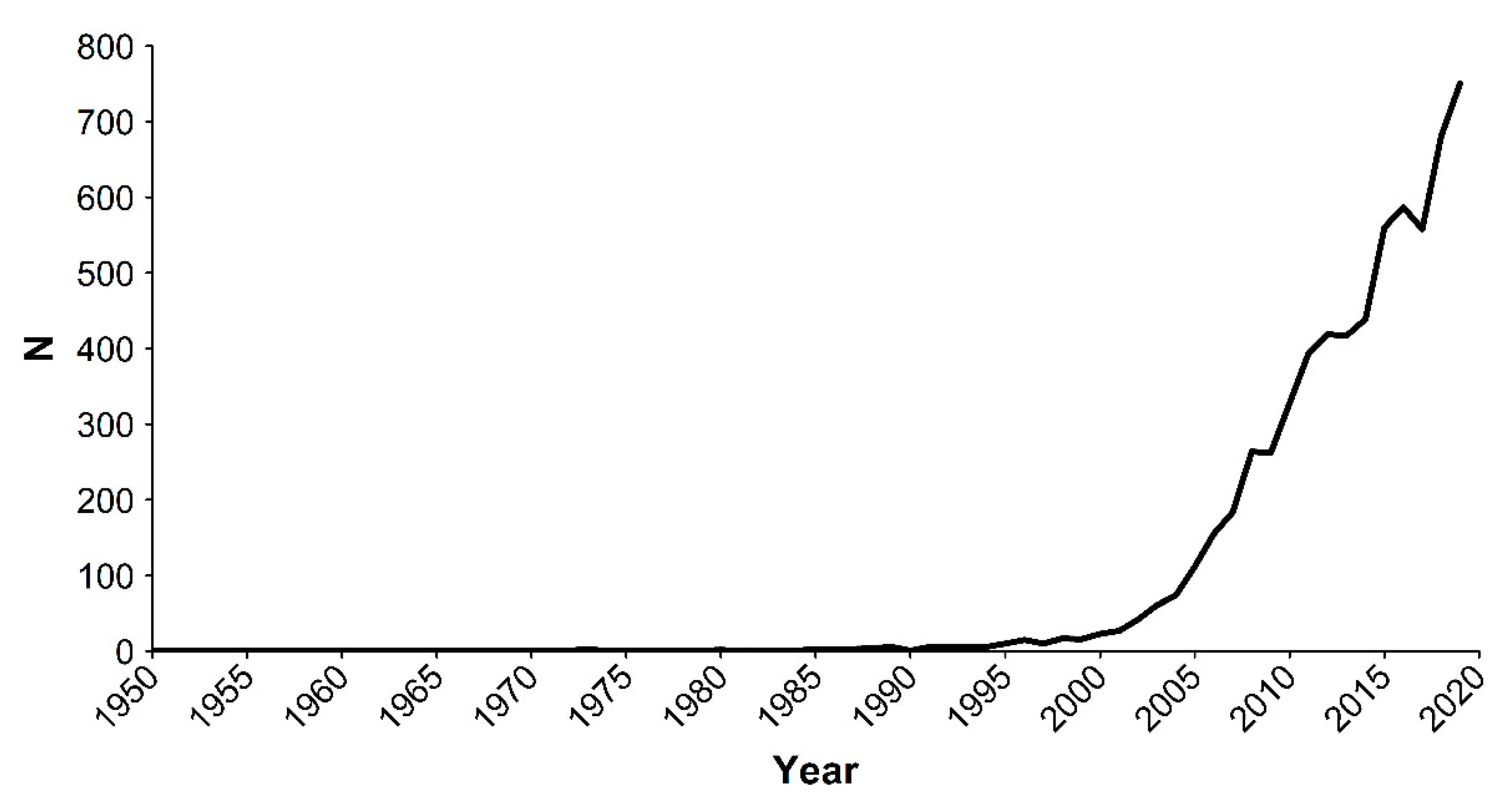
3.3. Publication Trends: Years and Citation Rate
4. Discussion
4.1. The Temporal Trends in Biomimicking Robotics Research
4.2. Biomimicking Energy Provision
4.3. Biomimicking Materials for Robotics
4.4. Biomimicking Design and Control
4.5. Limitations of Our Bibliographic Meta-Analysis
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject Area | n |
|---|---|
| Engineering | 2985 |
| Materials Science | 1707 |
| Chemistry | 1402 |
| Chemical Engineering | 1290 |
| Environmental Science | 1259 |
| Computer Science | 1193 |
| Biochemistry, Genetics and Molecular Biology | 1152 |
| Physics and Astronomy | 1109 |
| Energy | 896 |
| Mathematics | 525 |
| Agricultural and Biological Sciences | 420 |
| Earth and Planetary Sciences | 285 |
| Immunology and Microbiology | 174 |
| Multidisciplinary | 146 |
| Medicine | 133 |
| Social Sciences | 79 |
| Business, Management and Accounting | 53 |
| Neuroscience | 35 |
| Pharmacology, Toxicology and Pharmaceutics | 24 |
| Economics, Econometrics and Finance | 22 |
| Arts and Humanities | 19 |
| Health Professions | 18 |
| Decision Sciences | 17 |
| Psychology | 7 |
| Veterinary | 4 |
| Dentistry | 1 |
| Nursing | 1 |
| Country | n | % | Country | n | % | Country | n | % | Country | n | % |
|---|---|---|---|---|---|---|---|---|---|---|---|
| China | 2183 | 26.573 | Mexico | 36 | 0.438 | Ethiopia | 6 | 0.073 | Monaco | 1 | 0.012 |
| United States | 1714 | 20.864 | Israel | 34 | 0.414 | Lithuania | 6 | 0.073 | Nepal | 1 | 0.012 |
| United Kingdom | 451 | 5.490 | Saudi Arabia | 34 | 0.414 | Oman | 5 | 0.061 | North Macedonia | 1 | 0.012 |
| India | 384 | 4.674 | Pakistan | 32 | 0.390 | Croatia | 4 | 0.049 | Peru | 1 | 0.012 |
| Germany | 364 | 4.431 | Ireland | 31 | 0.377 | Kenya | 4 | 0.049 | Sri Lanka | 1 | 0.012 |
| Japan | 339 | 4.127 | Estonia | 30 | 0.365 | Senegal | 4 | 0.049 | Tanzania | 1 | 0.012 |
| South Korea | 294 | 3.579 | Indonesia | 29 | 0.353 | Slovakia | 4 | 0.049 | Venezuela | 1 | 0.012 |
| Italy | 241 | 2.934 | Thailand | 28 | 0.341 | Tunisia | 4 | 0.049 | |||
| Australia | 234 | 2.848 | Egypt | 26 | 0.316 | Ecuador | 3 | 0.037 | |||
| France | 210 | 2.556 | South Africa | 26 | 0.316 | Luxembourg | 3 | 0.037 | |||
| Canada | 187 | 2.276 | Romania | 21 | 0.256 | Macao | 3 | 0.037 | |||
| Spain | 175 | 2.130 | Argentina | 20 | 0.243 | Mauritius | 3 | 0.037 | |||
| Singapore | 173 | 2.106 | Czech Republic | 20 | 0.243 | Puerto Rico | 3 | 0.037 | |||
| Sweden | 98 | 1.193 | New Zealand | 20 | 0.243 | Cuba | 2 | 0.024 | |||
| Taiwan | 92 | 1.120 | Viet Nam | 20 | 0.243 | Jordan | 2 | 0.024 | |||
| Hong Kong | 86 | 1.047 | Hungary | 19 | 0.231 | Kazakhstan | 2 | 0.024 | |||
| Belgium | 84 | 1.023 | Bangladesh | 16 | 0.195 | Russia | 2 | 0.024 | |||
| Iran | 84 | 1.023 | Chile | 16 | 0.195 | Serbia | 2 | 0.024 | |||
| Netherlands | 84 | 1.023 | Nigeria | 14 | 0.170 | Antarctica | 1 | 0.012 | |||
| Switzerland | 84 | 1.023 | Colombia | 11 | 0.134 | Azerbaijan | 1 | 0.012 | |||
| Malaysia | 82 | 0.998 | Iraq | 11 | 0.134 | Barbados | 1 | 0.012 | |||
| Brazil | 80 | 0.974 | Philippines | 11 | 0.134 | Belarus | 1 | 0.012 | |||
| Denmark | 63 | 0.767 | Qatar | 11 | 0.134 | Bosnia and Herzegovina | 1 | 0.012 | |||
| Greece | 61 | 0.743 | United Arab Emirates | 10 | 0.122 | Burkina Faso | 1 | 0.012 | |||
| Poland | 61 | 0.743 | Bulgaria | 9 | 0.110 | Cyprus | 1 | 0.012 | |||
| Portugal | 57 | 0.694 | Latvia | 9 | 0.110 | French Polynesia | 1 | 0.012 | |||
| Russian Federation | 57 | 0.694 | Lebanon | 9 | 0.110 | Ghana | 1 | 0.012 | |||
| Austria | 55 | 0.670 | Algeria | 8 | 0.097 | Libyan Arab Jamahiriya | 1 | 0.012 | |||
| Finland | 52 | 0.633 | Morocco | 8 | 0.097 | Liechtenstein | 1 | 0.012 | |||
| Turkey | 44 | 0.536 | Slovenia | 8 | 0.097 | Mali | 1 | 0.012 | |||
| Norway | 42 | 0.511 | Ukraine | 7 | 0.085 | Malta | 1 | 0.012 |
References
- Van Wynsberghe, A.; Donhauser, J. The dawning of the ethics of environmental robots. Sci. Eng. Ethics 2018, 24, 1777–1800. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, G.Z.; Bellingham, J.; Dupont, P.E.; Fischer, P.; Floridi, L.; Full, R.; Jacobstein, N.; Kumar, V.; McNutt, M.; Merrifield, R.; et al. The grand challenges of Science Robotics. Sci. Robot. 2018, 3, eaar7650:1–eaar7650:14. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Degnarian, N.; McCauley, D. 12 robots that could make (or break) the oceans. World Economic Forum. Available online: https://www.weforum.org/agenda/2016/09/12-cutting-edge-technologies-that-could-save-our-oceans?utm_content=bufferf4c29&utm_medium=social&utm_source=plus.google.com&utm_campaign=buffer (accessed on 11 April 2021).
- Fu, K.; Moreno, D.; Yang, M.; Wood, K.L. Bio-inspired design: An overview investigating open questions from the broader field of design-by-analogy. J. Mech. Des. 2014, 136, 111102:1–111102:18. [Google Scholar] [CrossRef] [Green Version]
- Snell-Rood, E. Interdisciplinarity: Bring biologists into biomimetics. Nature 2016, 529, 277–278. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Atkeson, C.G.; Hale, J.G.; Pollick, F.; Riley, M.; Kotosaka, S.; Schaul, S.; Shibata, T.; Tevatia, G.; Ude, A.; Vijayakumar, S.; et al. Using humanoid robots to study human behavior. IEEE Intell. Syst. 2000, 15, 46–56. [Google Scholar] [CrossRef] [Green Version]
- Bhushan, B. Biomimetics: Lessons from nature-an overview. Philos. Trans. R. Soc. A 2009, 367, 1445–1486. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Calisti, M.; Picardi, G.; Laschi, C. Fundamentals of soft robot locomotion. J. R. Soc. Interface 2017, 14, 20170101:1–20170101:16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ijspeert, A.J.; Crespi, A.; Ryczko, D.; Cabelguen, J.M. From swimming to walking with a salamander robot driven by a spinal cord model. Science 2007, 315, 1416–1420. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wood, R.J. The first take-off of a biologically inspired at-scale robotic insect. IEEE Trans. Robot. 2008, 24, 341–347. [Google Scholar] [CrossRef]
- Fei, F.; Tu, Z.; Zhang, J.; Deng, X. Learning extreme hummingbird manoeuvres on flapping wing robots. In Proceedings of the 2019 International Conference on Robotics and Automation ICRA, Montreal, QC, Canada, 20–24 May 2019; pp. 109–115. [Google Scholar] [CrossRef] [Green Version]
- Anderson, J.M.; Chhabra, N.K. Manoeuvring and stability performance of a robotic tuna. Integr. Comp. Biol. 2002, 42, 118–126. [Google Scholar] [CrossRef] [Green Version]
- Ikeda, M.; Hikasa, S.; Watanabe, A.; Nagai, I. Motion analysis of a manta robot for underwater exploration by propulsive experiments and the design of central pattern generator. Int. J. Autom. Technol. 2014, 8, 231–237. [Google Scholar] [CrossRef]
- McColgan, J.; McGookin, E.W. Coordination of a school of robotic fish using nearest neighbour principles. In Proceedings of the IEEE OCEANS 2014, Taipei, Taiwan, 7–10 April 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Villanueva, A.; Bressers, S.; Tadesse, Y.; Priya, S. Jellyfish inspired underwater unmanned vehicle. In Electroactive Polymer Actuators and Devices EAPAD 2009, Proceedings of SPIE SMART STRUCTURES AND MATERIALS + NONDESTRUCTIVE EVALUATION AND HEALTH MONITORING, San Diego, CA, USA, 8–12 March 2009; Bar-Cohen, Y., Wallmersperger, T., Eds.; SPIE: Bellingham, WA, USA, 2009; Volume 7287, pp. 72871G:1–72871G:12. [Google Scholar] [CrossRef]
- Hood, E. RoboLobsters: The beauty of biomimetics. Environ. Health Perspect. 2004, 112, A486–A489. [Google Scholar] [CrossRef]
- Kim, J.Y.; Jun, B.H. Design of six-legged walking robot, Little Crabster for underwater walking and operation. Adv. Robot. 2014, 28, 77–89. [Google Scholar] [CrossRef]
- Carey, B. Maiden voyage of Stanford’s humanoid robotic diver recovers treasures from King Louis XIV’s wrecked flagship. Stanford News. Available online: https://news.stanford.edu/2016/04/27/robotic-diver-recovers-treasures (accessed on 11 April 2021).
- Khatib, O.; Yeh, X.; Brantner, G.; Soe, B.; Kim, B.; Ganguly, S.; Stuart, H.; Wang, S.; Cutkosky, M.; Edsinger, A.; et al. Ocean-One: A robotic avatar for oceanic discovery. IEEE Robot. Autom. Mag. 2016, 23, 20–29. [Google Scholar] [CrossRef]
- Danovaro, R.; Fanelli, E.; Aguzzi, J.; Billett, D.; Carugati, L.; Corinaldesi, C.; Dell’Anno, A.; Gjerde, K.; Jamieson, A.J.; Kark, S.; et al. Ecological variables for developing a global deep-ocean monitoring and conservation strategy. Nat. Ecol. Evol. 2020, 4, 181–192. [Google Scholar] [CrossRef]
- Ue, M.; Sakaushi, K.; Uosaki, K. Basic knowledge in battery research bridging the gap between academia and industry. Mater. Horiz. 2020, 7, 1937–1954. [Google Scholar] [CrossRef]
- Ieropoulos, I.A.; Greenman, J.; Melhuish, C.; Horsfield, I. Microbial fuel cells for robotics: Energy autonomy through artificial symbiosis. ChemSusChem 2012, 5, 1020–1026. [Google Scholar] [CrossRef]
- Schon, T.B.; McAllister, B.T.; Li, P.F.; Seferos, D.S. The rise of organic electrode materials for energy storage. Chem. Soc. Rev. 2016, 45, 6345–6404. [Google Scholar] [CrossRef] [Green Version]
- El Mekawy, A.; Srikanth, S.; Bajracharya, S.; Hegab, H.M.; Nigam, P.S.; Singh, A.; Mohan, S.V.; Pant, D. Food and agricultural wastes as substrates for Bio-Electrochemical System (BES): The synchronized recovery of sustainable energy and waste treatment. Food Res. Int. 2015, 73, 213–225. [Google Scholar] [CrossRef]
- Rabaey, K.; Angenent, L.; Schröder, U.; Keller, J. Bio-Electrochemical Systems: From Extracellular Electron Transfer to Biotechnological Application; IWA Publishing: London, UK, 2009; ISBN 9781843392330. [Google Scholar] [CrossRef] [Green Version]
- Hart, J.K.; Martinez, K. Environmental sensor networks: A revolution in the earth system science? Earth-Sci. Rev. 2006, 78, 177–191. [Google Scholar] [CrossRef] [Green Version]
- Jacobson, M.; Charlson, R.; Rodhe, H.; Orians, G. Earth System Science 72: From Biogeochemical Cycles to Global Changes, 1st ed.; Elsevier Academic Press: London, UK, 2000; ISBN 9780123793706. [Google Scholar]
- Reid, W.V.; Chen, D.; Goldfarb, L.; Hackmann, H.; Lee, Y.T.; Mokhele, K.; Ostrom, E.; Raivio, K.; Rockström, J.; Schellnhuber, H.J.; et al. Earth system science for global sustainability: Grand challenges. Science 2010, 330, 916–917. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bayat, B.; Crasta, N.; Crespi, A.; Pascoal, A.M.; Ijspeert, A. Environmental monitoring using autonomous vehicles: A survey of recent searching techniques. Curr. Opin. Biotechnol. 2017, 45, 76–84. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aguzzi, J.; Chatzievangelou, D.; Marini, S.; Fanelli, E.; Danovaro, R.; Flögel, S.; Lebris, N.; Juanes, F.; De Leo, F.; Del Rio, J.; et al. New high-tech interactive and flexible networks for the future monitoring of deep-sea ecosystems. Environ. Sci. Technol. 2019, 53, 6616–6631. [Google Scholar] [CrossRef] [Green Version]
- Duarte, M.; Gomes, J.; Costa, V.; Rodrigues, T.; Silva, F.; Lobo, V.; Monteiro, M.; Oliveira, S.M.; Christensen, A.L. Application of swarm robotics systems to marine environmental monitoring. In Proceedings of the IEEE OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Scilimati, V.; Petitti, A.; Boccadoro, P.; Colella, R.; Di Paola, D.; Milella, A.; Grieco, L.A. Industrial Internet of things at work: A case study analysis in robotic-aided environmental monitoring. IET Wirel. Sens. Syst. 2017, 7, 155–162. [Google Scholar] [CrossRef] [Green Version]
- Vasilijević, A.; Nađ, Đ.; Mandić, F.; Mišković, N.; Vukić, Z. Coordinated navigation of surface and underwater marine robotic vehicles for ocean sampling and environmental monitoring. IEEE/ASME Trans. Mechatron. 2017, 2, 1174–1184. [Google Scholar] [CrossRef]
- Batth, R.S.; Nayyar, A.; Nagpal, A. Internet Of robotic Things: Driving intelligent robotics of future concept, architecture, applications and technologies. In Proceedings of the 2018 4th International Conference on Computing Sciences ICCS, Jalandhar, India, 30–31 August 2018; pp. 151–160. [Google Scholar] [CrossRef]
- Shukla, A.; Karki, H. Application of robotics in onshore oil and gas industry–A review Part I. Robot. Auton. Syst. 2016, 75, 490–507. [Google Scholar] [CrossRef]
- Zereik, E.; Bibuli, M.; Mišković, N.; Ridao, P.; Pascoal, A. Challenges and future trends in marine robotics. Ann. Rev. Control 2018, 46, 350–368. [Google Scholar] [CrossRef]
- Dachwald, B.; Ulamec, S.; Postberg, F.; Sohl, F.; De Vera, J.P.; Waldman, C.; Lorenz, R.D.; Zacny, K.A.; Hellard, H.; Biele, J.; et al. Key technologies and instrumentation for subsurface exploration of ocean worlds. Space Sci. Rev. 2020, 216, 83:1–83:45. [Google Scholar] [CrossRef]
- Gao, J.; Chien, S. Review on space robotics: Toward top-level science through space exploration. Sci. Robot. 2017, 2, eaan5074:1–eaan5074:11. [Google Scholar] [CrossRef] [Green Version]
- Rountree, R.A.; Aguzzi, J.; Marini, S.; Fanelli, E.; De Leo, C.F.; Del Rio, J.; Juanes, F. Towards an optimal design for ecosystem-level ocean observatories. In Oceanography and Marine Biology: An Annual Review; Hawkins, S.J., Allcock, A.L., Bates, A.E., Evans, A.J., Firth, L.B., McQuaid, C.D., Russell, B.D., Smith, I.P., Swearer, S.E., Todd, P.A., Eds.; CRC Press: London, UK, 2020; Volume 58, pp. 79–106. ISBN 9780429351495. [Google Scholar] [CrossRef]
- Aguzzi, J.; Chatzievangelou, D.; Francescangeli, M.; Marini, S.; Bonofiglio, F.; Del Río, J.; Danovaro, R. The hierarchic treatment of marine ecological information from spatial networks of benthic platforms. Sensors 2020, 20, 1751. [Google Scholar] [CrossRef] [Green Version]
- Dunbabin, M.; Marques, L. Robots for environmental monitoring: Significant advancements and applications. IEEE Robot. Autom. Mag. 2012, 19, 24–39. [Google Scholar] [CrossRef]
- Cobo, M.J.; López-Herrera, A.G.; Herrera-Viedma, E.; Herrera, F. Science mapping software tools: Review, analysis, and cooperative study among tools. J. Am. Soc. Inf. Sci. Technol. 2011, 62, 1382–1402. [Google Scholar] [CrossRef]
- Linnenluecke, M.K.; Marrone, M.; Singh, A.K. Conducting systematic literature reviews and bibliometric analyses. Aust. J. Manag. 2020, 45, 175–194. [Google Scholar] [CrossRef]
- Ammad, S.; Alaloul, W.S.; Saad, S.; Qureshi, A.H. Personal protective equipment (PPE) usage in construction projects: A scientometric approach. J. Build. Eng. 2021, 35, 102086. [Google Scholar] [CrossRef]
- Valenzuela, L.M.; Merigó, J.M.; Johnston, W.J.; Nicolas, C.; Jaramillo, J.F. Thirty years of the Journal of Business & Industrial Marketing: A bibliometric analysis. J. Bus. Ind. Mark. 2017, 32, 1–17. [Google Scholar] [CrossRef]
- Jin, R.; Yuan, H.; Chen, Q. Science mapping approach to assisting the review of construction and demolition waste management research published between 2009 and 2018. Resour. Conserv. Recycl. 2019, 140, 175–188. [Google Scholar] [CrossRef]
- Kim, M.C.; Nam, S.; Wang, F.; Zhu, Y. Mapping scientific landscapes in UMLS research: A scientometric review. J. Am. Medic. Inform. Assoc. 2020, 27, 1612–1624. [Google Scholar] [CrossRef]
- Pallottino, F.; Biocca, M.; Nardi, P.; Figorilli, S.; Menesatti, P.; Costa, C. Science mapping approach to analyse the research evolution on precision agriculture: World, EU and Italian situation. Precis. Agric. 2018, 19, 1011–1026. [Google Scholar] [CrossRef]
- Costa, C.; Schurr, U.; Loreto, F.; Menesatti, P.; Carpentier, S. Plant phenotyping research trends, a science mapping approach. Front. Plant Sci. 2019, 9, 1933. [Google Scholar] [CrossRef] [Green Version]
- Costa, C.; Fanelli, E.; Marini, S.; Danovaro, R.; Aguzzi, J. Global deep-sea biodiversity research trends highlighted by science mapping approach. Front. Mar. Sci. 2020, 7, 384. [Google Scholar] [CrossRef]
- Jacobstein, N.; Bellingham, J.; Yang, G.Z. Robotics for space and marine sciences. Sci. Robot. 2017, 2, eaan5594:1–eaan5594:2. [Google Scholar] [CrossRef]
- Aguzzi, J.; Flexas, M.M.; Flögel, S.; Lo Jacono, C.; Tagherlini, M.; Costa, C.; Marini, S.; Bahamon, N.; Martini, S.; Fanelli, E.; et al. Exo-oceans exploration with deep-sea sensor and platform technologies. Astrobiology 2020, 20, 897–915. [Google Scholar] [CrossRef] [Green Version]
- Mitson, R.B.; Knudsen, H.P. Causes and effects of underwater noise on fish abundance estimation. Aquat. Living Resour. 2003, 16, 255–263. [Google Scholar] [CrossRef]
- Nedwell, J.R.; Lovell, J.; Turnpenny, A.W. Experimental validation of a species-specific behavioral impact metric for underwater noise. J. Acoust. Soc. Am. 2005, 118, 2019. [Google Scholar] [CrossRef]
- Holmes, J.D.; Carey, W.M.; Lynch, J.F. An overview of unmanned underwater vehicle noise in the low to mid frequencies bands. J. Acoust. Soc. Am. 2010, 127, 1812. [Google Scholar] [CrossRef]
- Nichols, T.A.; Anderson, T.W.; Širović, A. Intermittent noise induces physiological stress in a coastal marine fish. PLoS ONE 2015, 10, e0139157:1–e0139157:13. [Google Scholar] [CrossRef] [Green Version]
- Edmonds, N.J.; Firmin, C.J.; Goldsmith, D.; Faulkner, R.C.; Wood, D.T. A review of crustacean sensitivity to high amplitude underwater noise: Data needs for effective risk assessment in relation to UK commercial species. Mar. Pollut. Bull. 2016, 108, 5–11. [Google Scholar] [CrossRef]
- Picardi, G.; Borrelli, C.; Sarti, A.; Chimienti, G.; Calisti, M. A minimal metric for the characterization of acoustic noise emitted by underwater vehicles. Sensors 2020, 20, 6644. [Google Scholar] [CrossRef]
- Klarin, A. Mapping product and service innovation: A bibliometric analysis and a typology. Technol. Forecast. Soc. Chang. 2019, 149, 119776. [Google Scholar] [CrossRef]
- Van Eck, N.J.; Waltman, L. Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Eck, N.J.; Waltman, L. Text mining and visualization using VOSviewer. ArXiv Preprint. Available online: https://arxiv.org/abs/1109.2058 (accessed on 11 April 2021).
- Van Eck, N.J.; Waltman, L. Visualizing bibliometric networks. In Measuring Scholarly Impact: Methods and practice; Ding, Y., Rousseau, R., Wolfram, D., Eds.; Springer: Cham, Switzerland, 2014; pp. 285–320. ISBN 978-3-319-10376-1. [Google Scholar] [CrossRef]
- Waltman, L.; Van Eck, N.J.; Noyons, E.C.M. A unified approach to mapping and clustering of bibliometric networks. J. Informetr. 2010, 4, 629–635. [Google Scholar] [CrossRef] [Green Version]
- Waltman, L.; Van Eck, N.J. A smart local moving algorithm for large-scale modularity-based community detection. Eur. Phys. J. B 2013, 86, 471:1–471:14. [Google Scholar] [CrossRef]
- Van Eck, N.J.; Waltman, L.; Van Raan, A.F.J.; Klautz, J.M.R.; Peul, W.C. Citation analysis may severely underestimate the impact of clinical research as compared to basic research. PLoS ONE 2013, 8, e62395:1–e62395:6. [Google Scholar] [CrossRef] [Green Version]
- Hammer, Ø.; Harper, D.A.T.; Ryan, P.D. PAST: Paleontological statistics software package for education and data analysis. Palaeontol. Electron. 2001, 4, 1–9. Available online: http://palaeo-electronica.org/2001_1/past/issue1_01.htm (accessed on 11 April 2021).
- Singer, P.W. Wired for War: The Robotics Revolution and Conflicts in the Twenty-First Century; Penguin Books: New York, NY, USA, 2011; ISBN 9781594201981. [Google Scholar]
- United Nations Economic Commission for Europe-UNECE and International Federation of Robotics-IFR. World Robotics 2005—Statistics, Market Analysis, Forecasts, Case Studies and Profitability of Robot Investment; UNECE/IFR: New York, NY, USA, 2005; ISBN 9211011000. [Google Scholar]
- National Research Council-NRC. Critical Infrastructure for Ocean Research and Societal Needs in 2030; The National Academies Press: Washington, DC, USA, 2011; ISBN 978-0-309-18603-2. [Google Scholar] [CrossRef] [Green Version]
- Santoro, C.; Arbizzani, C.; Erable, B.; Ieropoulos, I. Microbial fuel cells: From fundamentals to applications. A review. J. Power Sour. 2017, 356, 225–244. [Google Scholar] [CrossRef]
- Soavi, F.; Bettini, L.G.; Piseri, P.; Milani, C.; Santoro, C.; Atanassov, P.; Arbizzani, C. Miniaturized supercapacitors: Key materials and structures towards autonomous and sustainable devices and systems. J. Power Sour. 2016, 326, 717–725. [Google Scholar] [CrossRef] [Green Version]
- Chauhan, G.; Jadhao, P.R.; Pant, K.K.; Nigam, K.D.P. Novel technologies and conventional processes for recovery of metals from waste electrical and electronic equipment: Challenges and opportunities—A review. J. Environ. Chem. Eng. 2018, 6, 1288–1304. [Google Scholar] [CrossRef]
- Won, S.W.; Kotte, P.; Wei, W.; Lim, A.; Yun, Y.S. Biosorbents for recovery of precious metals. Bioresour. Technol. 2014, 160, 203–212. [Google Scholar] [CrossRef]
- Gomes, H.I.; Funari, V.; Dinelli, E.; Soavi, F. Enhanced electrodialytic bioleaching of fly ashes of municipal solid waste incineration for metal recovery. Electrochim. Acta 2020, 345, 136188:1–136188:11. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, L.; Zularisam, A.W. Exoelectrogens: Recent advances in molecular drivers involved in extracellular electron transfer and strategies used to improve it for microbial fuel cell applications. Renew. Sustain. Energy Rev. 2016, 56, 1322–1336. [Google Scholar] [CrossRef] [Green Version]
- Kumar, R.; Singh, L.; Zularisam, A.W.; Hai, F.I. Microbial fuel cell is emerging as a versatile technology: A review on its possible applications, challenges and strategies to improve the performances. Int. J. Energy Res. 2018, 42, 369–394. [Google Scholar] [CrossRef]
- Melhuish, C.; Ieropoulos, I.; Greenman, J.; Horsfield, I. Energetically autonomous robots: Food for thought. Auton. Robots 2006, 21, 187–198. [Google Scholar] [CrossRef]
- Menon, C.; Broschart, M.; Lan, N. Biomimetic and robotics for space application: Challenges and emerging technologies. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)—Workshop on Biomimetic Robotics, Rome, Italy, 10–14 April 2007; pp. 1–8. [Google Scholar]
- Soderlund, K.M.; Kalousová, K.; Buffo, J.J.; Glein, C.R.; Goodman, J.C.; Mitri, G.; Patterson, G.W.; Postberg, F.; Rovira-Navarro, M.; Rückriemen, T.; et al. Ice-Ocean exchange processes in the Jovian and Saturnian satellites. Space Sci. Rev. 2020, 216, 80. [Google Scholar] [CrossRef]
- Hunt, E. The Social Animals That Are Inspiring New Behaviors for Robot Swarms. The Conversation. Available online: https://theconversation.com/the-social-animals-that-are-inspiring-new-behaviors-for-robot-swarms-113584 (accessed on 11 April 2021).
- Romano, D.; Donati, E.; Benelli, G.; Stefanini, C. A review on animal–robot interaction: From bio-hybrid organisms to mixed societies. Biol. Cybern. 2019, 113, 201–225. [Google Scholar] [CrossRef]
- Webster-Wood, V.A.; Akkus, O.; Gurkan, U.A.; Chiel, H.J.; Quinn, R.D. Organismal engineering: Toward a robotic taxonomic key for devices using organic materials. Sci. Robot. 2017, 2, eaap9281:1–eaap9281:18. [Google Scholar] [CrossRef] [Green Version]
- Bluman, J.E.; Kang, C.K.; Landrum, D.B.; Fahimi, F.; Mesmer, B. Marsbee—Can a bee fly on mars? In Proceedings of the 55th American Institute of Aeronautics and Astronautics (AIAA) Aerospace Sciences Meeting 2017-0328, Grapevine, TX, USA, 9–13 January 2017; pp. 1–13. [Google Scholar] [CrossRef]
- Wilkinson, S. Gastrobots—Benefits and challenges of microbial fuel cells in foodpowered robot applications. Auton. Robots 2000, 9, 99–111. [Google Scholar] [CrossRef]
- Kumar, S.S.; Kumar, V.; Kumar, R.; Malyan, S.K.; Pugazhendhi, A. Microbial fuel cells as a sustainable platform technology for bioenergy, biosensing, environmental monitoring, and other low power device applications. Fuel 2019, 255, 115682:1–115682:16. [Google Scholar] [CrossRef]
- Hong, L.; Grot, S.; Logan, B.E. Electrochemically assisted microbial production of hydrogen from acetate. Environ. Sci. Technol. 2005, 39, 4317–4320. [Google Scholar] [CrossRef]
- Logan, B.E. Scaling up microbial fuel cells and other bioelectrochemical systems. Appl. Microbiol. Biotechnol. 2010, 85, 1665–1671. [Google Scholar] [CrossRef]
- Tender, L.M.; Gray, S.A.; Groveman, E.; Lowy, D.A.; Kauffman, P.; Melhado, J.; Tyce, R.C.; Flynn, D.; Petrecca, R.; Dobarro, J. The first demonstration of a microbial fuel cell as a viable power supply: Powering a meteorological buoy. J. Power Sources 2008, 179, 571–575. [Google Scholar] [CrossRef]
- Chouler, J.; Cruz-Izquierdo, Á.; Rengaraj, S.; Scott, J.L.; Di Lorenzo, M. A screen-printed paper microbial fuel cell biosensor for detection of toxic compounds in water. Biosens. Bioelectron. 2018, 102, 49–56. [Google Scholar] [CrossRef]
- Zhou, T.; Han, H.; Liu, P.; Xiong, J.; Tian, F.; Li, X. Microbial fuels cell-based biosensor for toxicity detection: A review. Sensors 2017, 17, 2230. [Google Scholar] [CrossRef]
- Dasgupta, A.; Chowdhury, N.; De, R.K. Metabolic pathway engineering: Perspectives and applications. Comput. Methods Programs Biomed. 2020, 192, 105436:1–105436:15. [Google Scholar] [CrossRef]
- Kim, G.B.; Kim, W.J.; Kim, H.U.; Lee, S.Y. Machine learning applications in systems metabolic engineering. Curr. Opin. Biotechnol. 2020, 64, 1–9. [Google Scholar] [CrossRef]
- Cai, W.; Lesnik, K.L.; Wade, M.J.; Heidrich, E.S.; Wang, Y.; Liu, H. Incorporating microbial community data with machine learning techniques to predict feed substrates in microbial fuel cells. Biosens. Bioelectron. 2019, 133, 64–71. [Google Scholar] [CrossRef]
- Yewale, A.; Methekar, R.; Agrawal, S. Multiple model-based control of multi variable continuous microbial fuel cell (CMFC) using machine learning approaches. Comput. Chem. Eng. 2020, 140, 106884. [Google Scholar] [CrossRef]
- Wanieck, K.; Fayemi, P.E.; Maranzana, N.; Zollfrank, C.; Jacobs, S. Biomimetics and its tools. Bioinspir. Biomim. Nanobiomater. 2017, 6, 53–66. [Google Scholar] [CrossRef] [Green Version]
- Vincent, J.F.; Mann, D.L. Systematic technology transfers from biology to engineering. Philos. Trans. R. Soc. A 2002, 360, 159–173. [Google Scholar] [CrossRef]
- Vincent, J.F.V.; Bogatyreva, I.A.; Bogatyrev, N.R.; Bowyer, A.; Pahl, A.K. Biomimetics: Its practice and theory. J. R. Soc. Interface 2006, 3, 471–482. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Lee, B.P.; Messersmith, P.B. A reversible wet/dry adhesive inspired by mussels and geckos. Nature 2007, 448, 338–341. [Google Scholar] [CrossRef] [PubMed]
- Dorrer, C.; Rühe, J. Mimicking the Stenocara beetle: Dewetting of drops from a patterned superhydrophobic surface. Langmuir 2008, 24, 6154–6158. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Bai, H.; Huang, Z.; Tian, X.; Nie, F.Q.; Zhao, Y.; Zhai, J.; Jiang, L. Directional water collection on wetted spider silk. Nature 2010, 463, 640–643. [Google Scholar] [CrossRef] [PubMed]
- Claverie, M.; McReynolds, C.; Petitpas, A.; Thomas, M.; Fernandes, S.C.M. Marine-derived polymeric materials and biomimetics: An overview. Polymers 2020, 12, 1002. [Google Scholar] [CrossRef]
- Hennebert, E.; Maldonado, B.; Ladurner, P.; Flammang, P.; Santos, R. Experimental strategies for the identification and characterization of adhesive proteins in animals: A review. Interface Focus 2015, 5, 20140064:1–20140064:19. [Google Scholar] [CrossRef] [Green Version]
- Mueller, W.E.G.; Wang, X.; Proksch, P.; Perry, C.C.; Osinga, R.; Garderes, J.; Schroeder, H.C. Principles of biofouling protection in marine sponges: A model for the design of novel biomimetic and bio-inspired coatings in the marine environment? Mar. Biotechnol. 2013, 15, 375–398. [Google Scholar] [CrossRef]
- Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, S.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5, eaaz1012:1–eaaz1012:14. [Google Scholar] [CrossRef]
- Fish, F.E. Advantages of aquatic animals as models for bio-inspired drones over present AUV technology. Bioinspir. Biomim. 2020, 15, 025001. [Google Scholar] [CrossRef]
- Bicchi, A.; Kumar, V. Robotic grasping and contact: A review. In Proceedings of the 2000 ICRA Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings Cat. No. 00CH37065, San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 348–353. [Google Scholar] [CrossRef]
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Lida, F. Soft manipulators and grippers: A review. Front. Robot. AI 2016, 3, 69:1–69:12. [Google Scholar] [CrossRef] [Green Version]
- Bicchi, A.; Gabiccini, M.; Santello, M. Modelling natural and artificial hands with synergies. Philos. Trans. R. Soc. B 2011, 366, 3153–3161. [Google Scholar] [CrossRef]
- Controzzi, M.; Cipriani, C.; Carrozza, M.C. Design of artificial hands: A review. In The Human Hand as an Inspiration for Robot Hand Development; Balasubramanian, R., Santos, V., Eds.; Springer: Cham, Switzerland, 2014; Volume 95, pp. 219–246. ISBN 978-3-319-03016-6. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Darus, M.I.Z.; Al-Khafaji, A.A.M. Bio-inspired algorithms for modelling and control of underwater flexible single-link manipulator. In Sensor Networks and Signal Processing, Proceedings of the 2nd Sensor Networks and Signal Processing (SNSP 2019), Hualien, Taiwan, 19–22 November 2019; Peng, S.L., Favorskaya, M., Chao, H.C., Eds.; Springer: Singapore, 2021; Volume 176, pp. 483–496. ISBN 978-981-15-4916-8. [Google Scholar] [CrossRef]
- Mura, D.; Barbarossa, M.; Dinuzzi, G.; Grioli, G.; Caiti, A.; Catalano, M.G. A soft modular end effector for underwater manipulation: A gentle, adaptable grasp for the ocean depths. IEEE Robot. Autom. Mag. 2018, 25, 45–56. [Google Scholar] [CrossRef]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef]
- Vogt, D.M.; Becker, K.P.; Phillips, B.T.; Graule, M.A.; Rotjan, R.D.; Shank, T.M.; Cordes, E.E.; Wood, R.J.; Gruber, D.F. Shipboard design and fabrication of custom 3D-printed soft robotic manipulators for the investigation of delicate deep-sea organisms. PLoS ONE 2018, 13, e0200386:1–e0200386:16. [Google Scholar] [CrossRef]
- Youssef, I.; Mutlu, M.; Bayat, B.; Crespi, A.; Hauser, S.; Conradt, J.; Bernardino, A.; Ijspeert, A. A Neuro-inspired computational model for a visually guided robotic Lamprey using frame and event based cameras. IEEE Robot. Autom. Lett. 2020, 5, 2395–2402. [Google Scholar] [CrossRef]
- Powell, S.B.; Garnett, R.; Marshall, J.; Rizk, C.; Gruev, V. Bioinspired polarization vision enables underwater geolocalization. Sci. Adv. 2018, 4, eaao6841:1. [Google Scholar] [CrossRef] [Green Version]
- Dupeyroux, J.; Viollet, S.; Serres, J.R. An ant-inspired celestial compass applied to autonomous outdoor robot navigation. Robot. Auton. Syst. 2019, 117, 40–56. [Google Scholar] [CrossRef]
- Gul, J.Z.; Sajid, M.; Rehman, M.M.; Siddiqui, G.U.; Shah, I.; Kim, K.H.; Lee, J.W.; Choi, K.H. 3D printing for soft robotics—A review. Sci. Technol. Adv. Mater. 2018, 19, 243–262. [Google Scholar] [CrossRef] [Green Version]
- Gottwald, M.; Herzog, H.; Von Der Emde, G. A bio-inspired electric camera for short-range object inspection in murky waters. Bioinspir. Biomim. 2019, 14, 035002:1–035002:10. [Google Scholar] [CrossRef]
- Parrott, C.; Dodd, T.J.; Boxall, J.; Horoshenkov, K. Simulation of the behaviour of biologically-inspired swarm robots for the autonomous inspection of buried pipes. Tunn. Undergr. Space Technol. 2020, 101, 103356:1–103356:13. [Google Scholar] [CrossRef]
- Vedachalam, N.; Ramesh, R.; Jyothi, V.B.N.; Prakash, V.D.; Ramadass, G.A.; Atmanand, M.A. Design considerations for strategic autonomous underwater swarm robotic systems. Mar. Technol. Soc. J. 2020, 54, 25–34. [Google Scholar] [CrossRef]
- Praczyk, T. Neural collision avoidance system for biomimetic autonomous underwater vehicle. Soft Comput. 2020, 24, 1315–1333. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.; Cao, X.; Sun, B.; Luo, C. Biologically inspired self-organizing map applied to task assignment and path planning of an AUV system. IEEE Trans. Cogn. Develop. Syst. 2018, 10, 304–313. [Google Scholar] [CrossRef]
- Fernandez-Leon, J.A.; Acosta, G.G.; Rozenfeld, A. How simple autonomous decisions evolve into robust behaviours? A review from neurorobotics, cognitive, self-organized and artificial immune systems fields. BioSystems 2014, 124, 7–20. [Google Scholar] [CrossRef]
- Boulogne, L.H.; Wolf, B.J.; Wiering, M.A.; Van Netten, S.M. Performance of neural networks for localizing moving objects with an artificial lateral line. Bioinspir. Biomim. 2017, 12, 056009:1–056009:13. [Google Scholar] [CrossRef] [Green Version]
- Szymak, P.; Piskur, P.; Naus, K. The effectiveness of using a pretrained deep learning neural networks for object classification in underwater video. Remote Sens. 2020, 12, 3020. [Google Scholar] [CrossRef]
- Aiello, B.R.; Hardy, A.R.; Westneat, M.W.; Hale, M.E. Fins as mechanosensors for movement and touch-related behaviors. Integr. Comp. Biol. 2018, 58, 844–859. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, X.X.; Huang, J. Odour source localization algorithms on mobile robots: A review and future outlook. Robot. Auton. Syst. 2019, 112, 123–136. [Google Scholar] [CrossRef]
- Leadbetter, A.M.; Shepherd, A.; Arko, R.; Chandler, C.; Chen, Y.; Dockery, N.; Ferreira, R.; Fu, L.; Thomas, R.; West, P.; et al. Experiences of a “semantics smackdown”. Earth Sci. Inform. 2016, 9, 355–363. [Google Scholar] [CrossRef]
- DiGiusepe, N.; Pouchard, L.C.; Noy, N.F. SWEET ontology coverage for earth system sciences. Earth Sci. Inform. 2014, 7, 249–264. [Google Scholar] [CrossRef]
- Edwards, C. The best of NLP. Commun ACM. 2021, 64, 9–11. [Google Scholar] [CrossRef]
- Van Dinter, R.; Tekinerdogan, B.; Catal, C. Automation of systematic literature reviews: A systematic literature review. Inf. Softw. Technol. 2021, 136, 106589:1–106589:16. [Google Scholar] [CrossRef]
- Van Raan, A.F. Advances in bibliometric analysis: Research performance assessment and science mapping. In Bibliometrics. Use and Abuse in the Review of Research Performance. Wenner-Gren International Series; Blockmans, W., Engwall, L., Weaire, D., Eds.; Portland Press: London, UK, 2014; Volume 87, pp. 17–28. ISBN 978-185578-195-5. [Google Scholar]
- Ioannoni, V.; Vitale, T.; Costa, C.; Elliot, I. Depicting communities of Romani studies: On the who, when and where of Roma related scientific publications. Scientometrics 2020, 122, 1473–1490. [Google Scholar] [CrossRef] [Green Version]






| Rank | Journal | Year | n | % |
|---|---|---|---|---|
| 1 | Bioresource Technology | 1991 | 167 | 2.39 |
| 2 | Bioinspiration and Biomimetics | 2006 | 147 | 2.11 |
| 3 | Proceedings of SPIE the International Society for Optical Engineering | 1963 | 107 | 1.53 |
| 4 | ACS Applied Materials and Interfaces | 2009 | 105 | 1.50 |
| 5 | Journal of Bionic Engineering | 2004 | 80 | 1.15 |
| 6 | Langmuir | 1985 | 70 | 1.00 |
| 7 | Environmental Science and Technology | 1967 | 48 | 0.69 |
| 8 | Advanced Materials | 1989 | 46 | 0.66 |
| 9 | Biomass and Bioenergy | 1991 | 46 | 0.66 |
| 10 | Water Science and Technology | 1969 | 45 | 0.64 |
| Discipline | n |
|---|---|
| Engineering | 2985 |
| Materials Science | 1707 |
| Chemistry | 1402 |
| Chemical Engineering | 1290 |
| Environmental Science | 1259 |
| Computer Science | 1193 |
| Biochemistry, Genetics and Molecular Biology | 1152 |
| Physics and Astronomy | 1109 |
| Energy | 896 |
| Mathematics | 525 |
| Others | 1438 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aguzzi, J.; Costa, C.; Calisti, M.; Funari, V.; Stefanni, S.; Danovaro, R.; Gomes, H.I.; Vecchi, F.; Dartnell, L.R.; Weiss, P.; et al. Research Trends and Future Perspectives in Marine Biomimicking Robotics. Sensors 2021, 21, 3778. https://doi.org/10.3390/s21113778
Aguzzi J, Costa C, Calisti M, Funari V, Stefanni S, Danovaro R, Gomes HI, Vecchi F, Dartnell LR, Weiss P, et al. Research Trends and Future Perspectives in Marine Biomimicking Robotics. Sensors. 2021; 21(11):3778. https://doi.org/10.3390/s21113778
Chicago/Turabian StyleAguzzi, Jacopo, Corrado Costa, Marcello Calisti, Valerio Funari, Sergio Stefanni, Roberto Danovaro, Helena I. Gomes, Fabrizio Vecchi, Lewis R. Dartnell, Peter Weiss, and et al. 2021. "Research Trends and Future Perspectives in Marine Biomimicking Robotics" Sensors 21, no. 11: 3778. https://doi.org/10.3390/s21113778