An Application of the Gaussian Plume Model to Localization of an Indoor Gas Source with a Mobile Robot

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Gaussian Plume Indoor Application
- The model played a secondary role and the algorithms were enriched with wind velocity data.
- Their experiments were performed without paying attention to the validity of the model in these singular circumstances, specifically ignoring the distribution of velocities generated by their gas sources and the reduced dimensions of the rooms. For the case of Ishida et al., the concentration distribution in the immediate vicinity of their source is conical, approaching the turbulent jet theory [25] more than the Gaussian plume. For the case of Marques et al., they use two sources, which can provoke overlapping effects.
- Possible inaccuracies in the concentration when ignoring the effects of temperature and humidity on the gas sensors, in both cases metal-oxide sensors.
1.2. Objective
2. Theoretical Gas Distribution
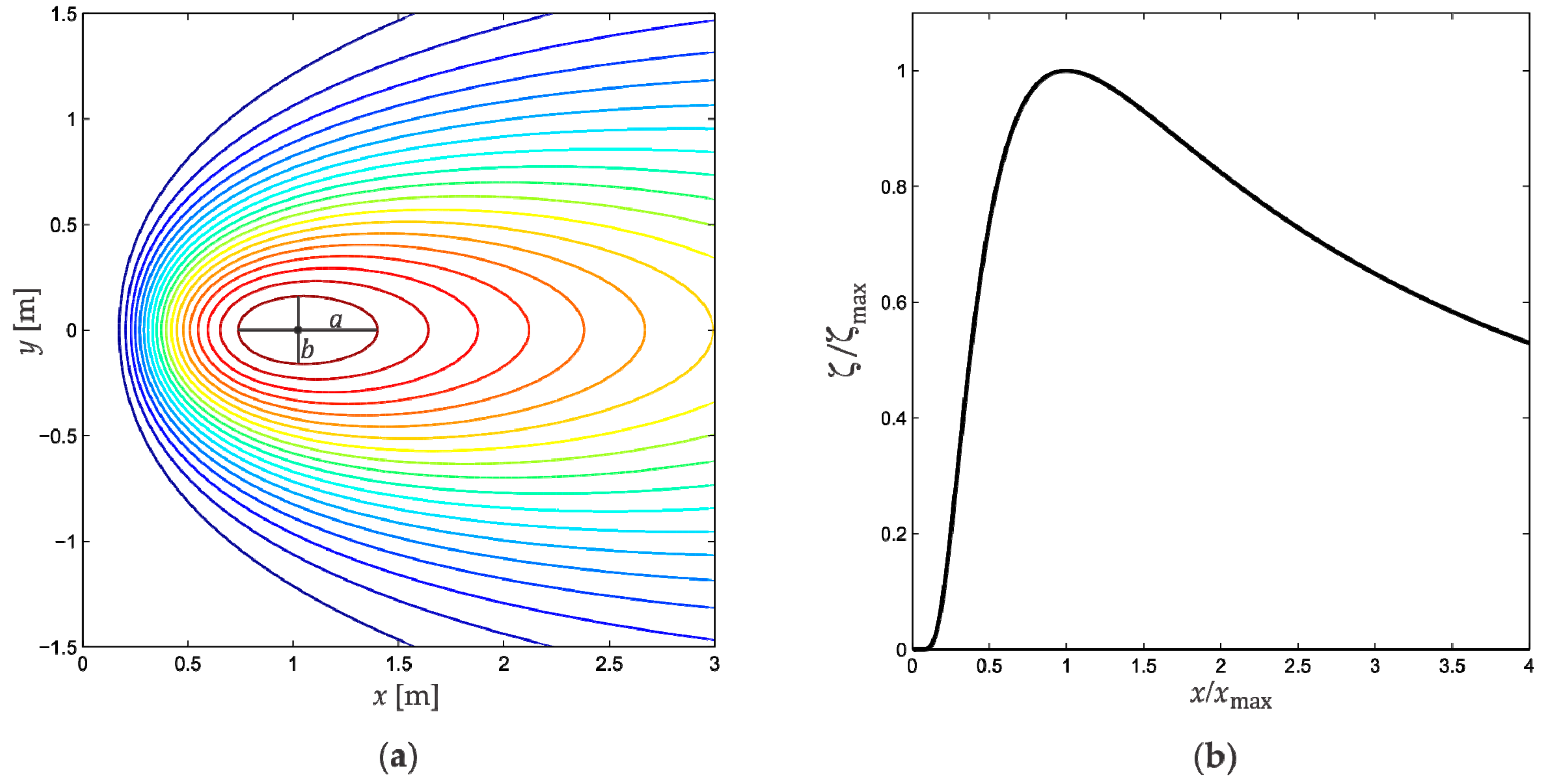
2.1. Gaussian Plume Model
- (1)
- The contaminant is emitted from soil level, thus ;
- (2)
- The concentration is measured at a constant height ;
- (3)
- The environmental conditions are stable inside the room, therefore the diffusion is considered isotropic so that ;
- (4)
- The contaminant does not penetrate the soil, accordingly ;
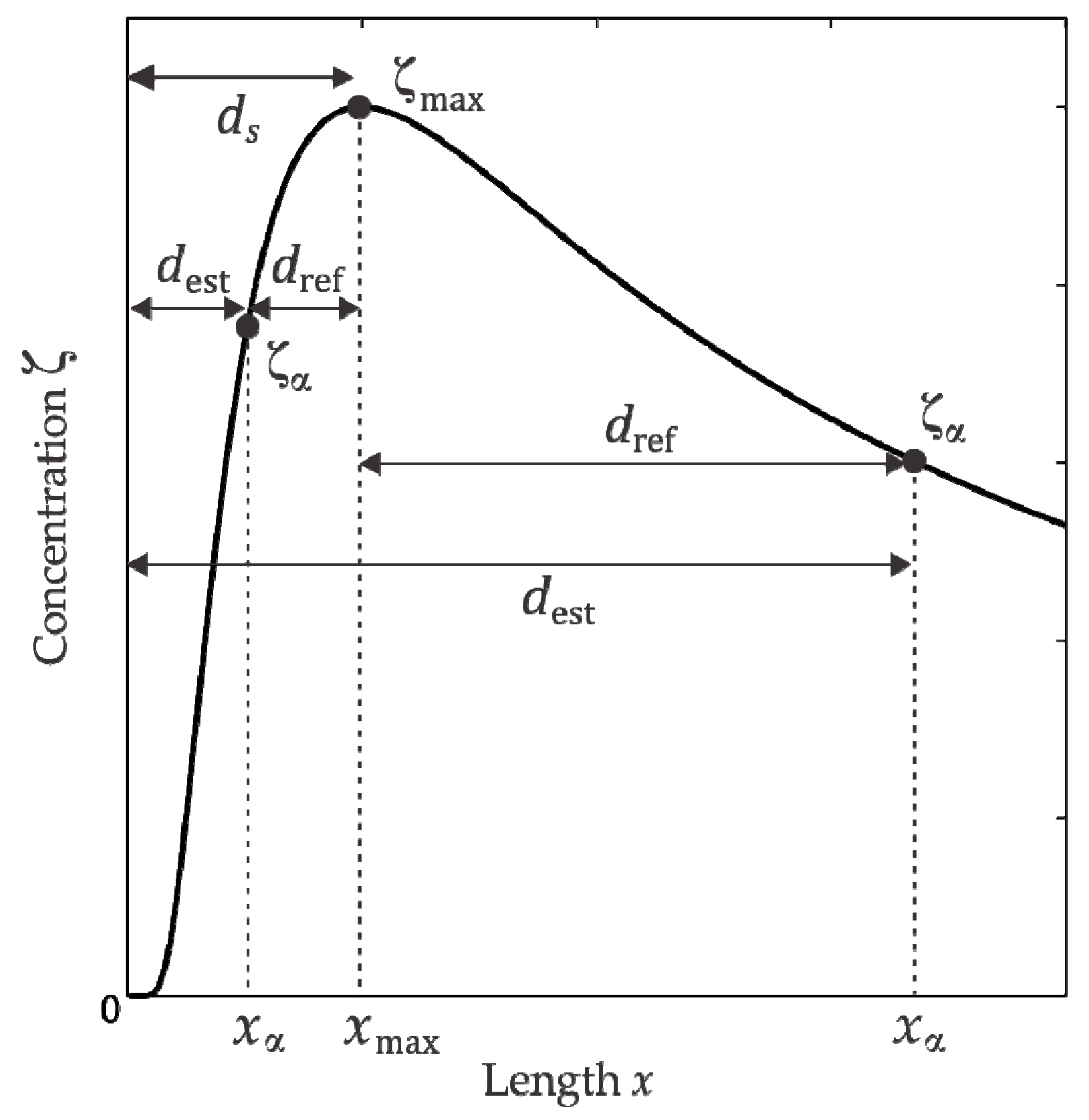
2.2. Source Position from a Partial Distribution Profile
3. Materials and Methods
3.1. Gas Sensors
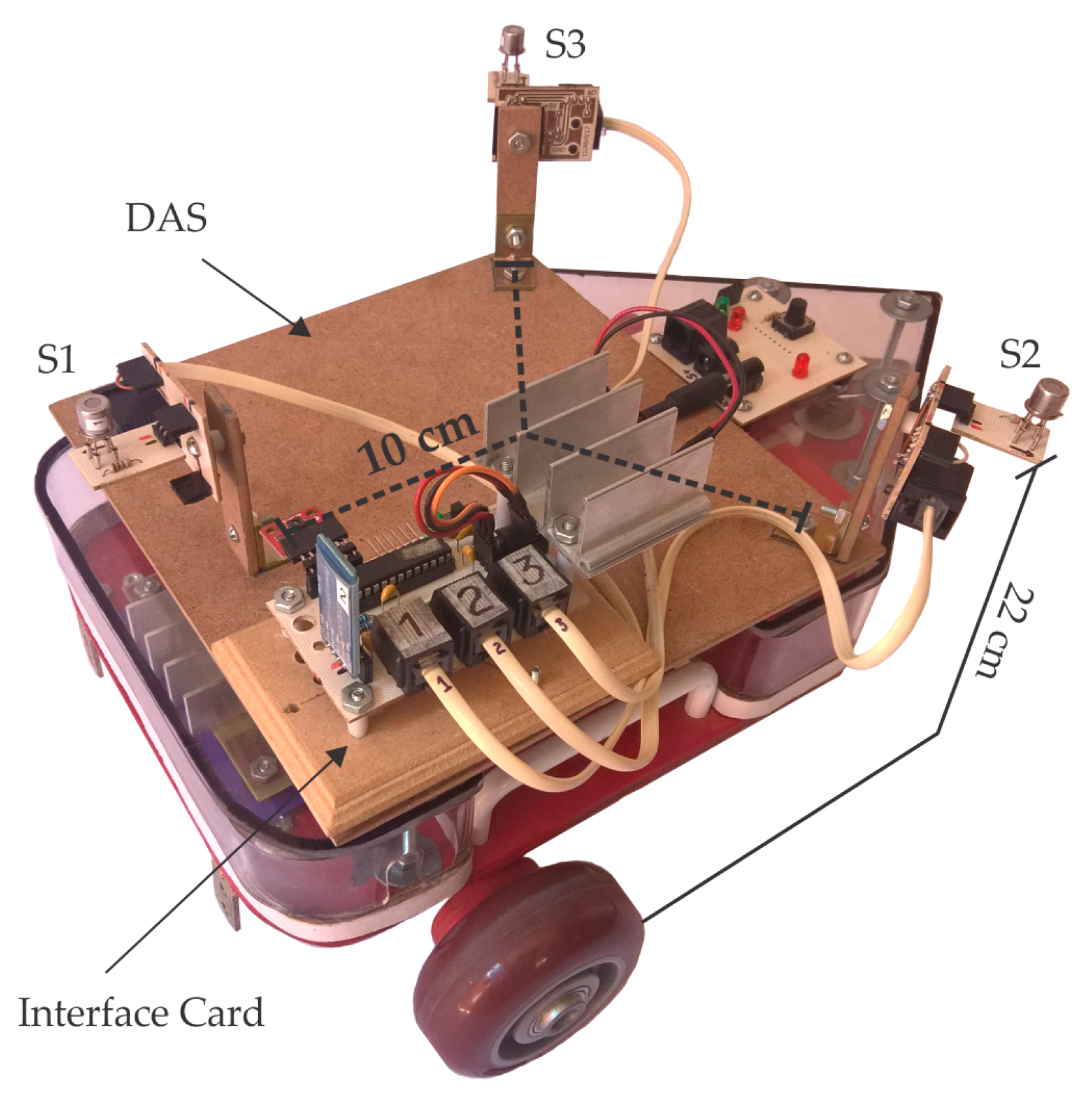
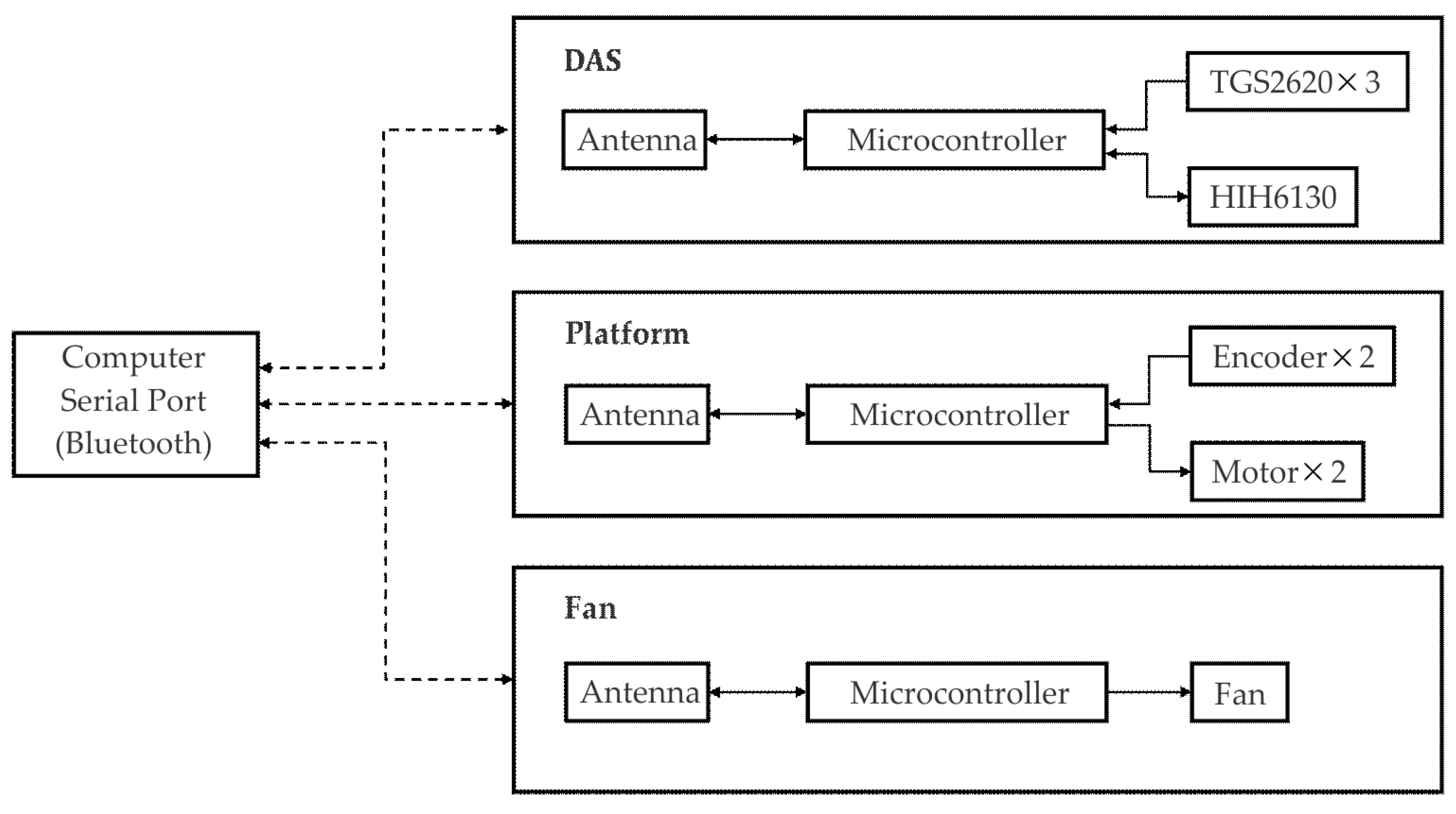
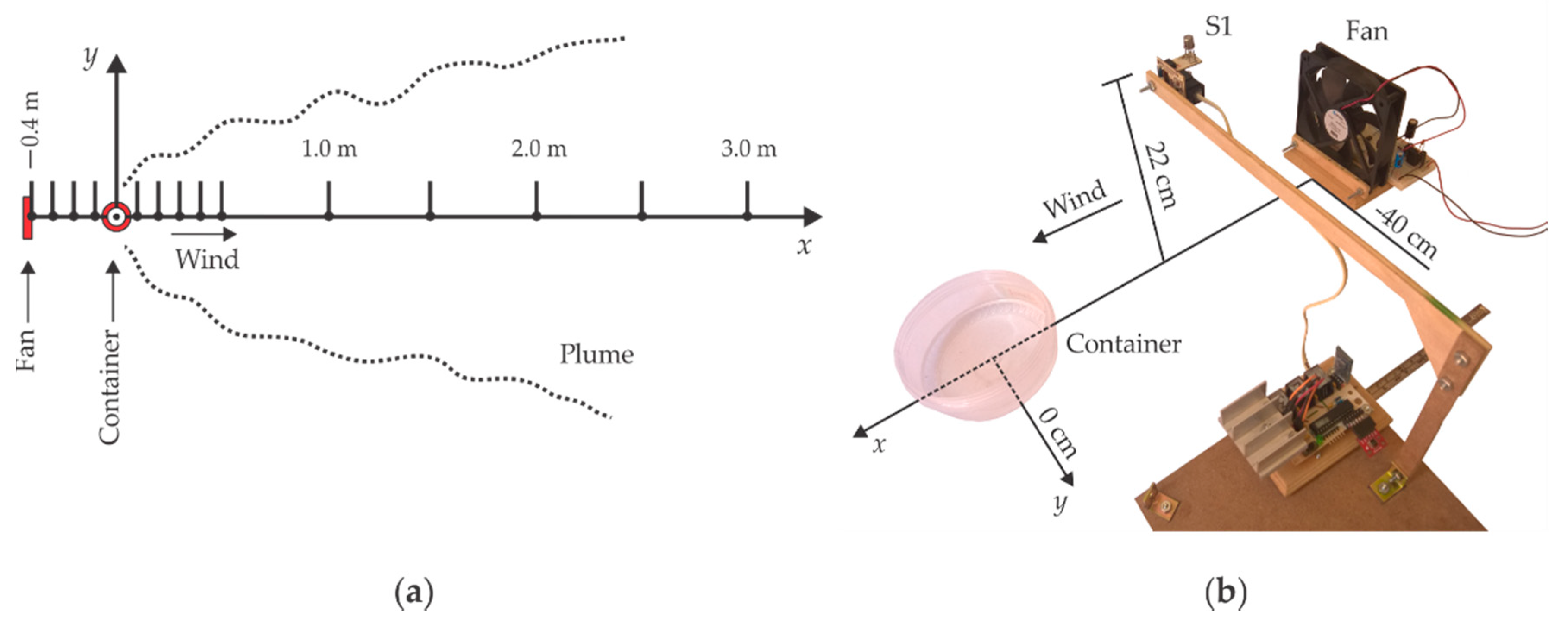
3.2. Data Acquisition, Robotic Platform and Fan
- Three TGS2620 sensors, together with the humidity and temperature sensor HIH6130 (Honeywell; Morris Plains, NJ, USA). The three TGS2620 sensors are placed facing up (22 cm height) at the vertices of an equilateral triangle as shown in Figure 3.
- An interface card as a link between the sensors and a computer, based on a PIC16F886 microcontroller (Microchip; Chandler, AZ, USA). It contains analog-digital converters for the TGS2620, it also implements the I2C communication protocol for the HIH6130 sensor and the UART protocol to transmit data to a computer via wireless.
- A computer in charge of sending commands to the interface card, as well as processing and storing the information received.
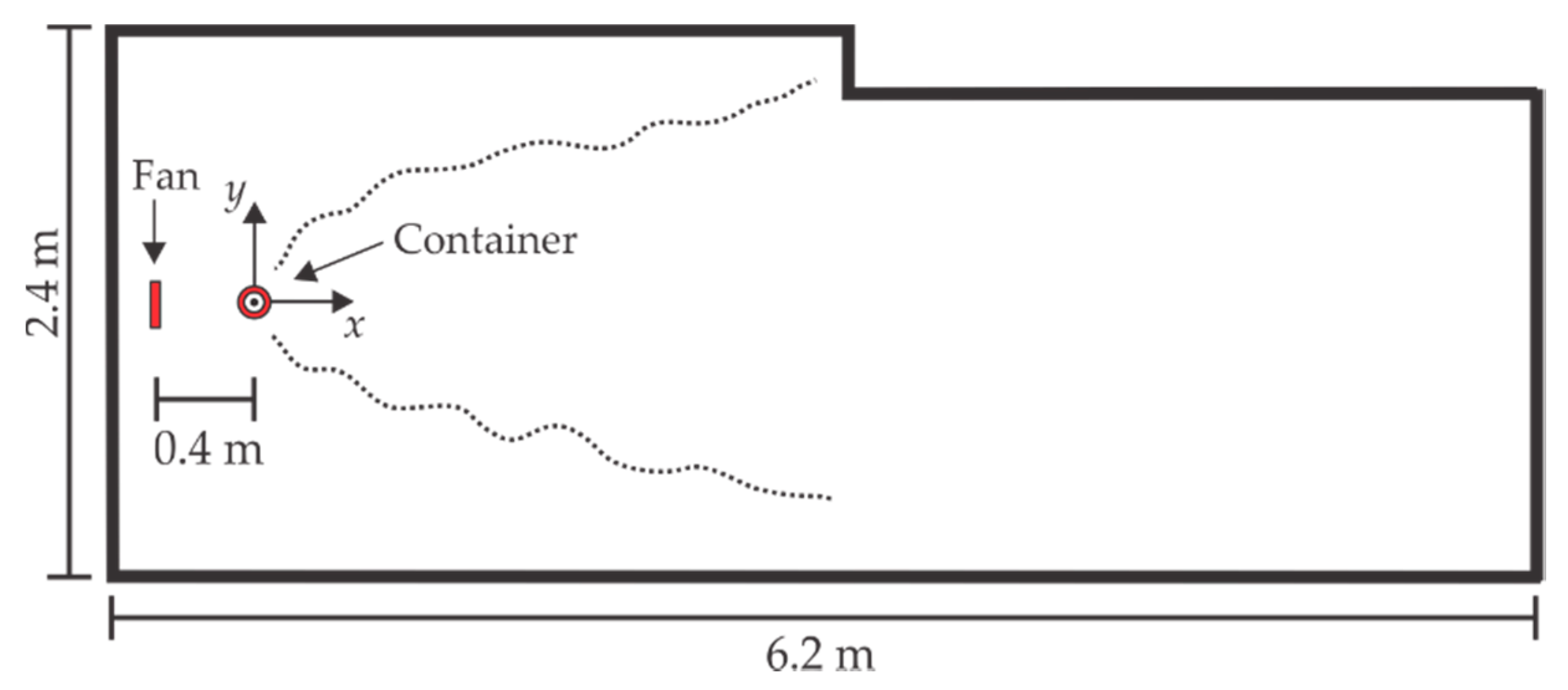
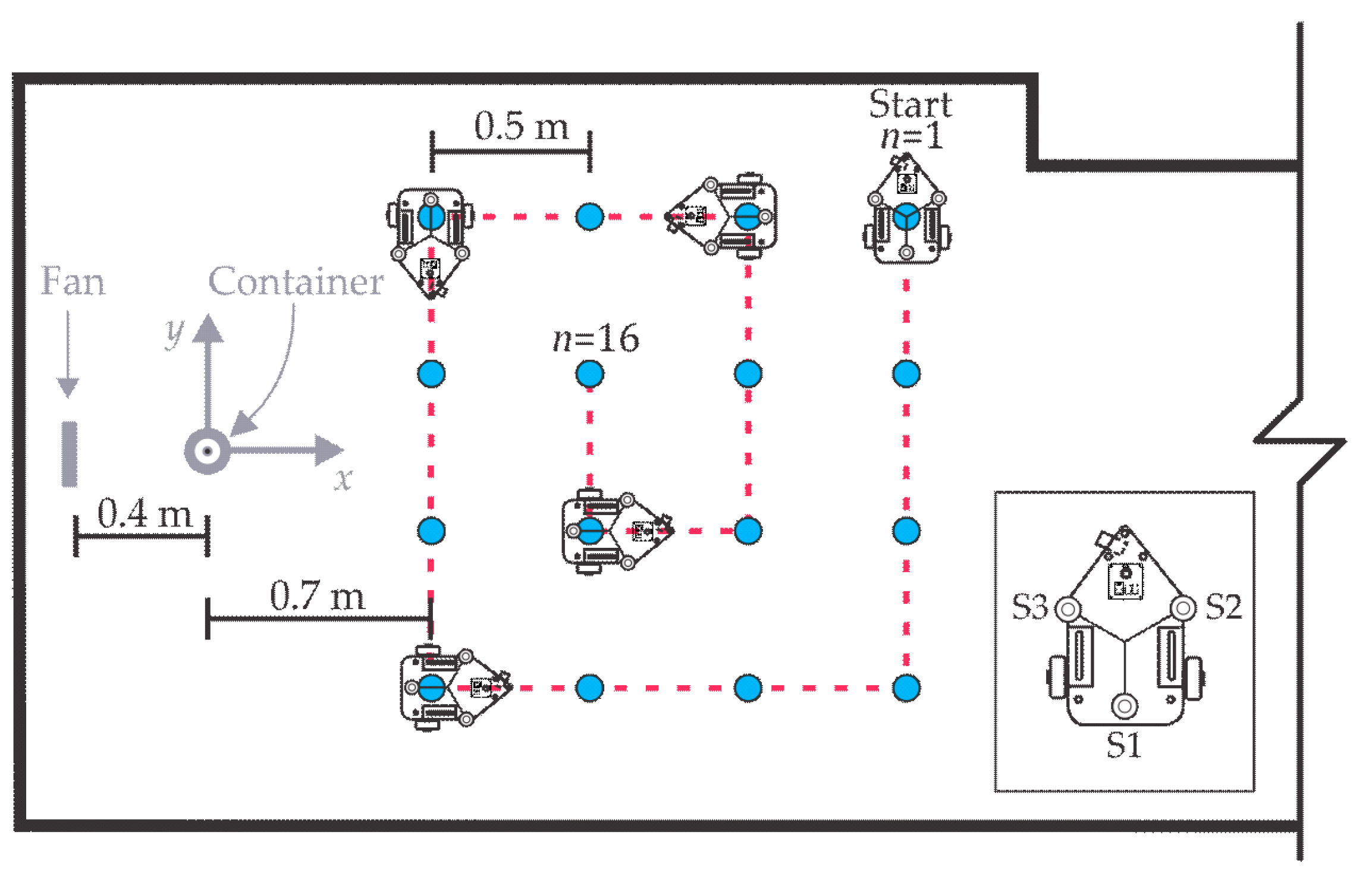
3.3. Arena
3.4. Measurements Order
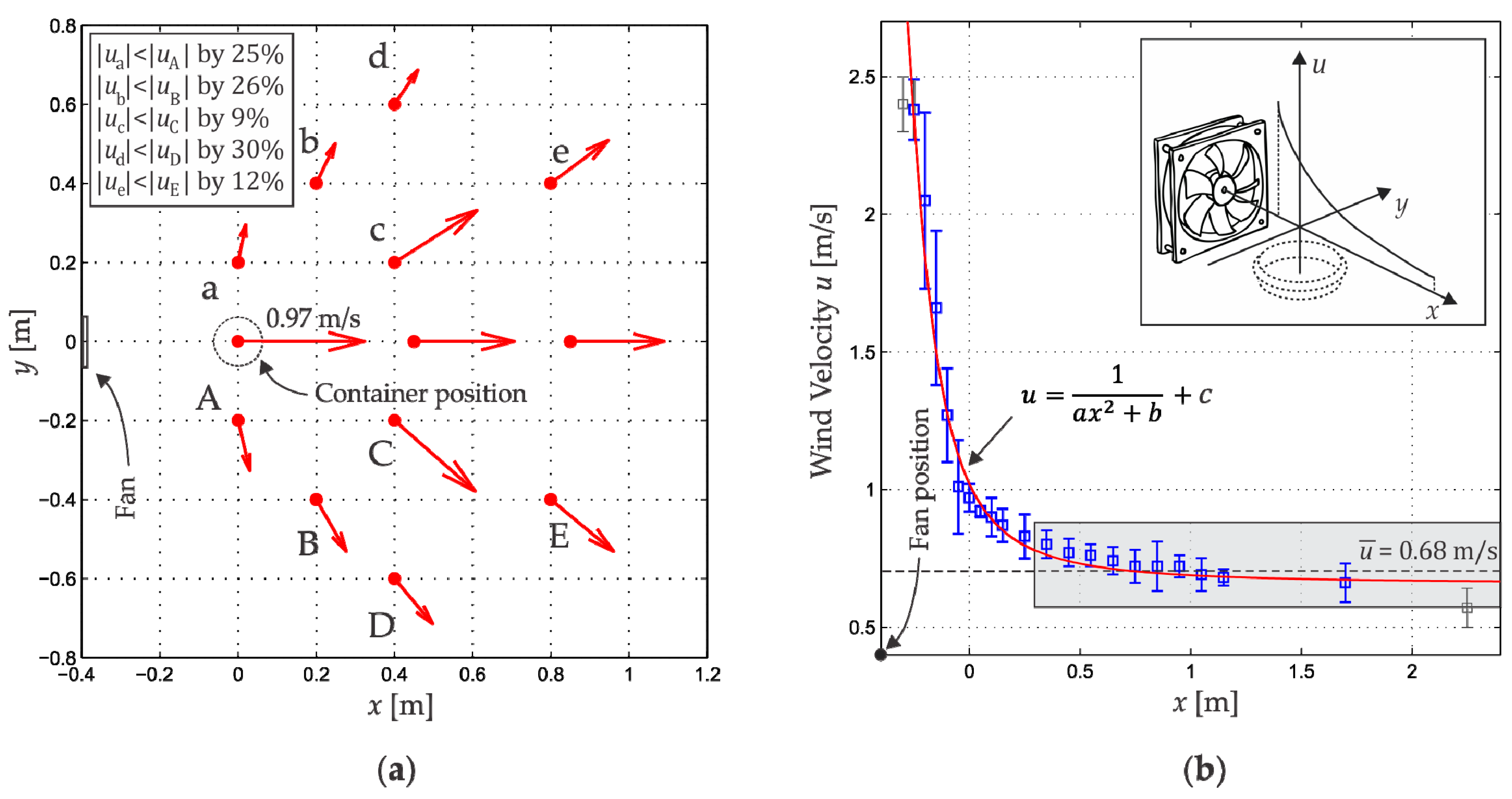
- How is the wind velocity distribution generated by the fan inside the room. It is important to determine this distribution since the model assumes a constant wind velocity in one-direction.
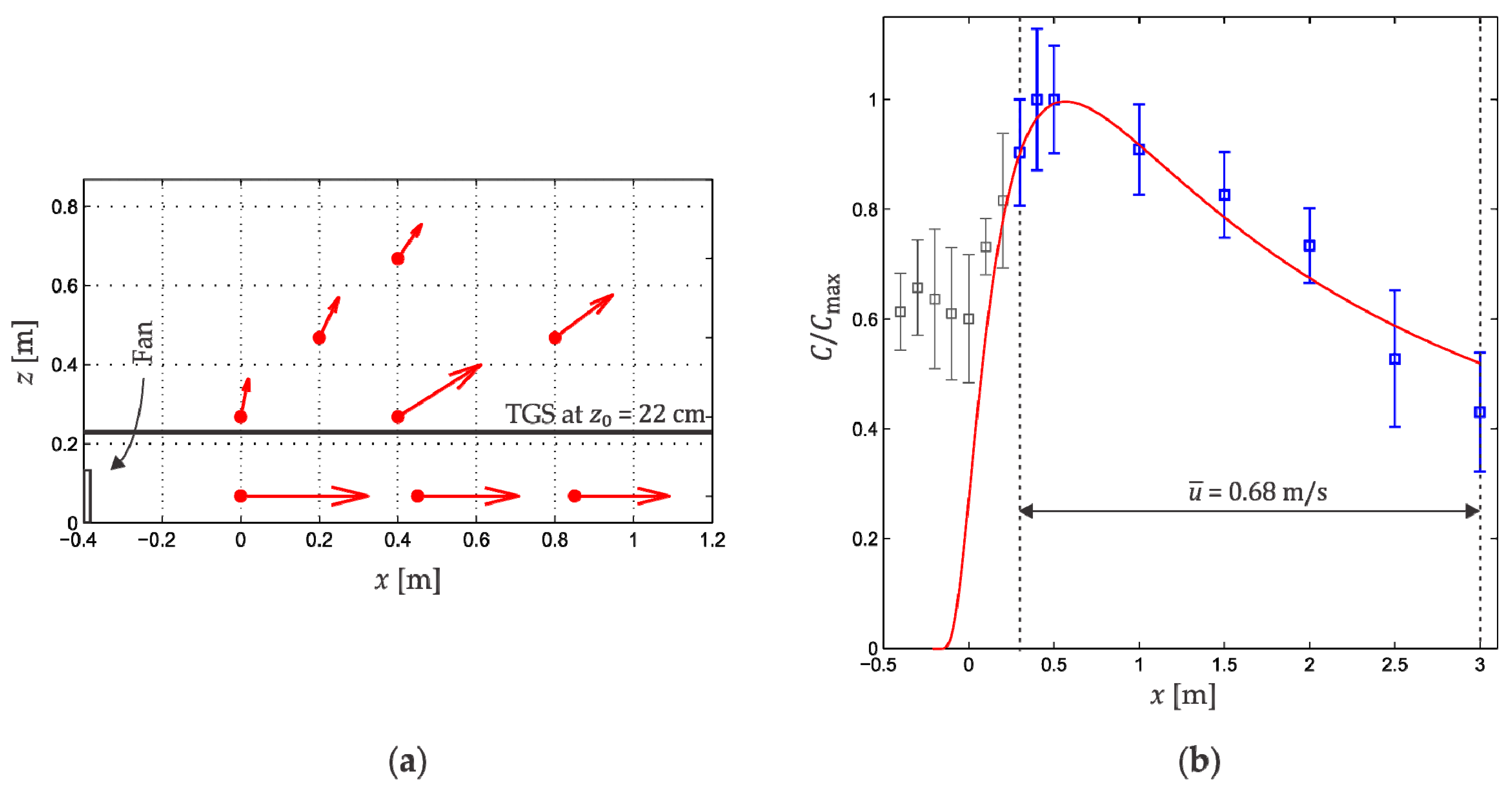
- How is the gas concentration profile along x-axis for our fan-container arrangement. The gas experimental profile is the first indication of the possible application of the model.
- How is the concentration distribution inside the room generated by our fan-container arrangement at a height. If the concentration distribution is similar to a Gaussian plume at least in one region, then the model can be used.
4. Results and Discussion
4.1. Wind Velocity Distribution
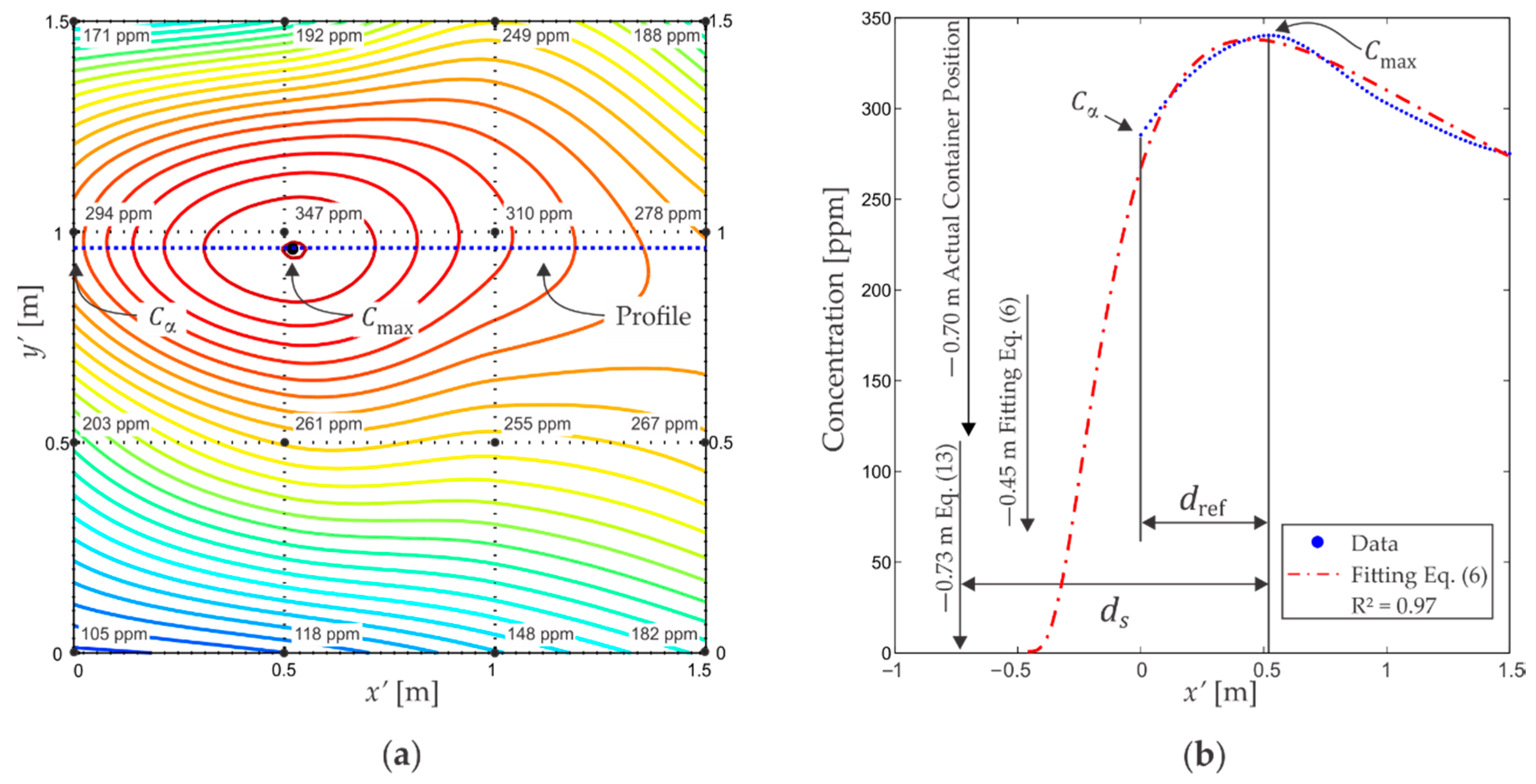
4.2. Ethanol Concentration Distribution Profile
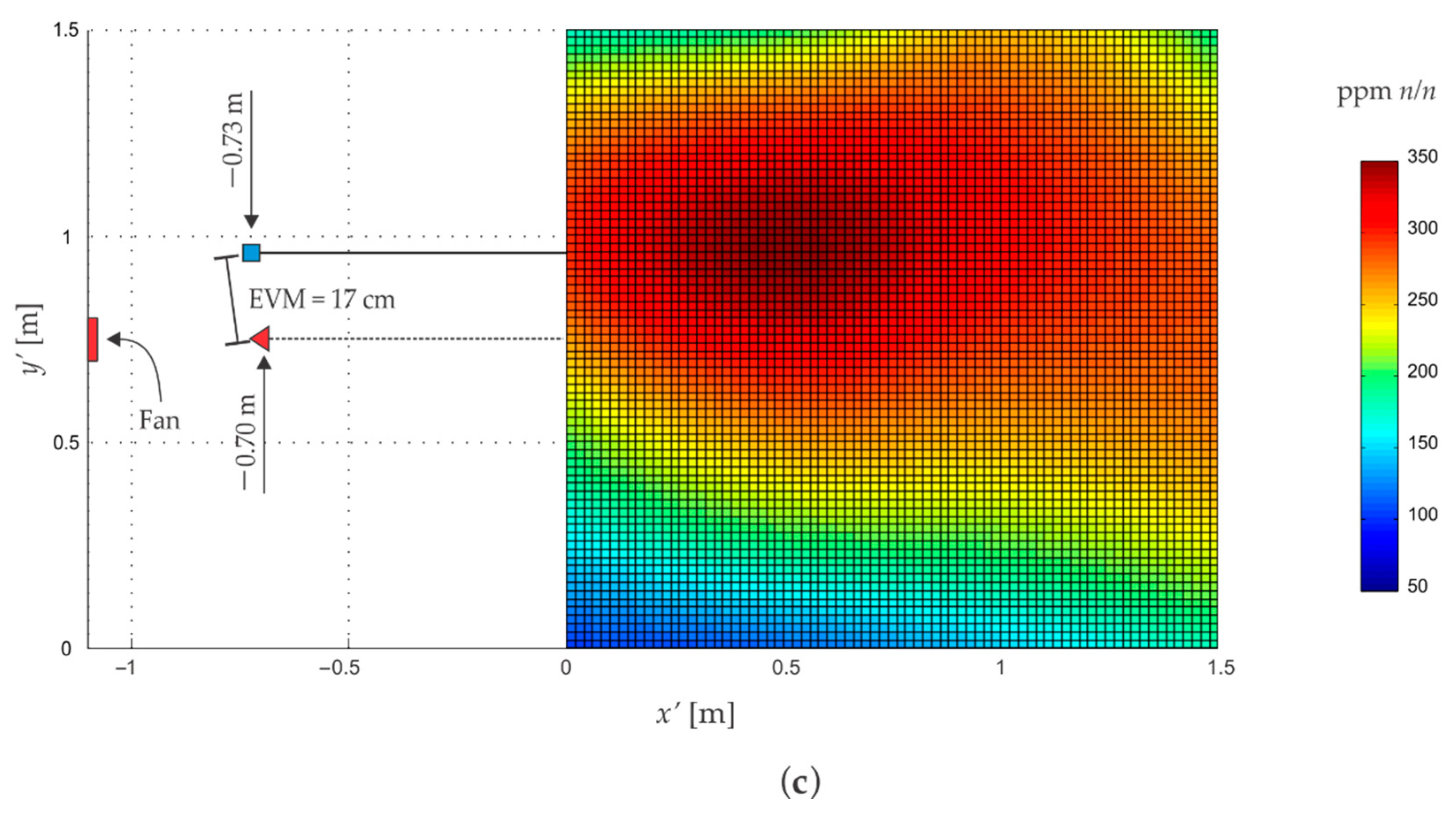
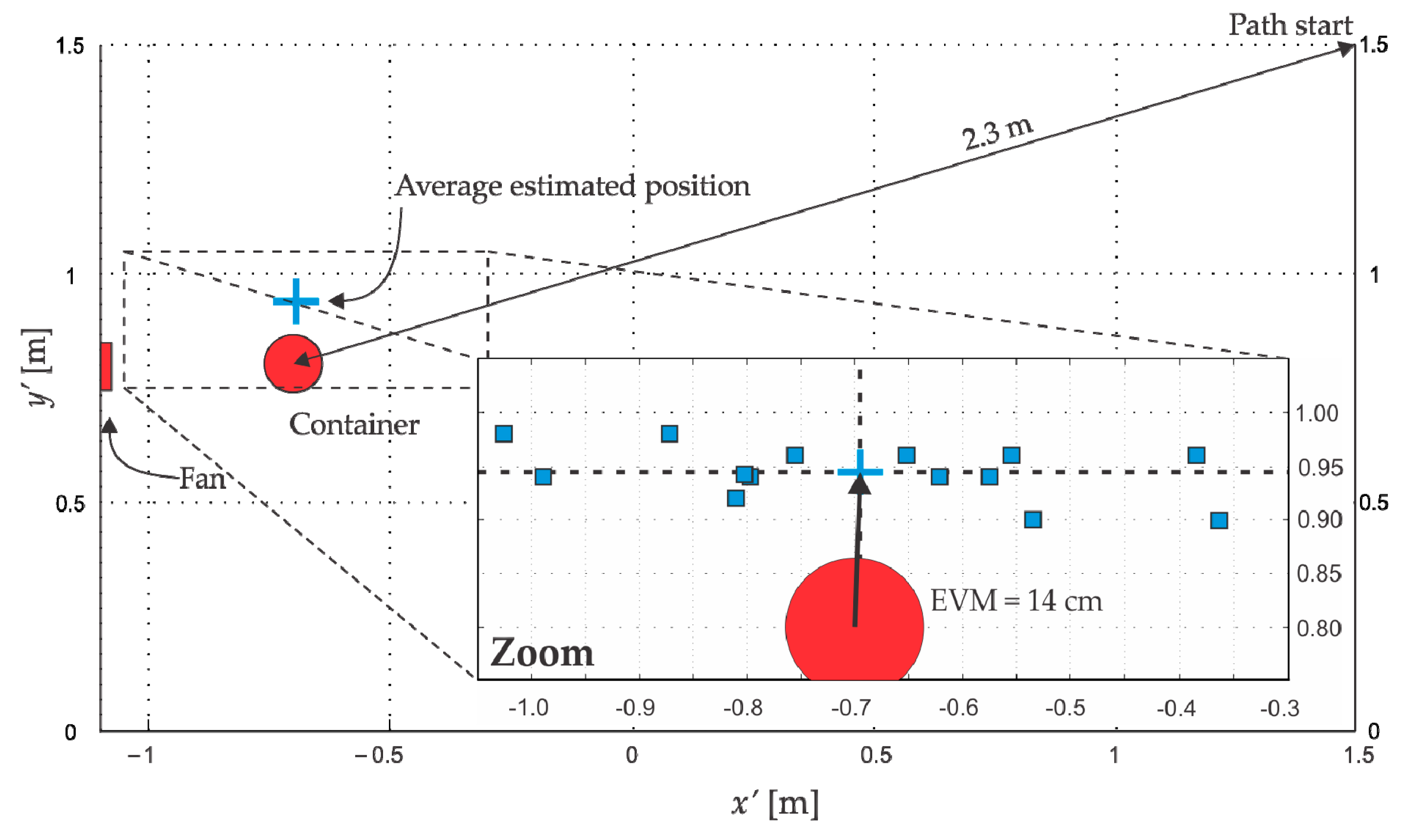
4.3. Ethanol Concentration Mapping Inside the Room and Locating the Source
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gongora, A.; Monroy, J.; Gonzalez-Jimenez, J. Gas Source Localization Strategies for Teleoperated Mobile Robots. An Experimental Analysis. In Proceedings of the European Conference on Mobile Robotics (ECMR 2017), Paris, France, 6–8 September 2017. [Google Scholar] [CrossRef]
- Russell, R.A.; Bab-Hadiashar, A.; Shepherd, R.L.; Wallace, G.G. A comparison of reactive robot chemotaxis algorithms. Robot. Auton. Syst. 2003, 45, 83–97. [Google Scholar] [CrossRef]
- Li, J.-G.; Meng, Q.-H.; Wang, Y.; Zeng, M. Odor source localization using a mobile robot in outdoor airflow environments with a particle filter algorithm. Auton. Rob. 2011, 30, 281–292. [Google Scholar] [CrossRef]
- Ishida, H.; Kagawa, Y.; Nakamoto, T.; Moriizumi, T. Odor-source localization in the clean room by an autonomous mobile sensing system. Sens. Actuators B 1996, 33, 115–121. [Google Scholar] [CrossRef]
- Ishida, H.; Nakamoto, T.; Moriizumi, T. Remote sensing of gas/odor source location and concentration distribution using mobile system. Sens. Actuators B 1998, 49, 52–57. [Google Scholar] [CrossRef]
- Marques, L.; Nunes, U.; de Almeida, A.T. Olfaction-based mobile robot navigation. Thin Solid Films 2002, 418, 51–58. [Google Scholar] [CrossRef] [Green Version]
- Hernandez Bennetts, V.; Lilienthal, A.J.; Neumann, P.P.; Trincavelli, M. Mobile robots for localizing gas emission sources on landfill sites: Is bio-inspiration the way to go? Front. Neuroeng. 2011, 4, 20. [Google Scholar] [CrossRef] [PubMed]
- Asadi, S.; Fan, H.; Hernandez Bennetts, V.; Lilienthal, A.J. Time-dependent gas distribution modelling. Robot. Auton. Syst. 2017, 96, 157–170. [Google Scholar] [CrossRef]
- Lilienthal, A.J.; Reggente, M.; Trincavelli, M.; Blanco, J.L.; Gonzalez, J. A Statistical Approach to Gas Distribution Modelling with Mobile Robots—The Kernel DM+V Algorithm. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009. [Google Scholar] [CrossRef]
- Lilienthal, A.J.; Loutfi, A.; Duckett, T. Airborne Chemical Sensing with Mobile Robots. Sensors 2006, 6, 1616–1678. [Google Scholar] [CrossRef] [Green Version]
- Monroy, J.; Gonzalez-Jimenez, J. Towards Odor—Sensitive Mobile Robots. In Electronic Nose Technologies and Advances in Machine Olfaction; IGI Global: Hershey, PA, USA, 2018; pp. 244–263. [Google Scholar] [CrossRef]
- Osório, L.; Cabrita, G.; Marques, L. Mobile Robot Odor Plume Tracking Using Three Dimensional Information. In Proceedings of the European Conference on Mobile Robots (ECMR2011), Session 6, Örebro, Sweden, 7–9 September 2011. [Google Scholar]
- Trincavelli, M.; Coradeshi, S.; Loutfi, A. Classification of Odours with Mobile Robots Based on Transient Response. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008. [Google Scholar] [CrossRef]
- Young Company. Available online: http://www.youngusa.com/products/11/3.html (accessed on 25 October 2018).
- Meng, Q.; Yang, W.; Wang, Y.; Li, F.; Zeng, M. Adapting an Ant Colony Metaphor for Multi-Robot Chemical Plume Tracing. Sensors 2012, 12, 4737–4763. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martinez, D.; Teixidó, M.; Font, D.; Moreno, J.; Tresanchez, M.; Marco, S.; Palacín, J. Ambient Intelligence Application Based on Environmental Measurements Performed with an Assistant Mobile Robot. Sensors 2014, 14, 6045–6055. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scientific Sales, Inc. Available online: https://www.scientificsales.com/1405-PK-021-Gill-UltraSonic-Anemometer-p/989-1.htm (accessed on 25 October 2018).
- Moreira, D.M.; Moraes, A.C.; Goulart, A.G.; Toledo, T. A contribution to solve the atmospheric diffusion equation with eddy diffusivity depending on source distance. Atmos. Environ. 2014, 83, 254–259. [Google Scholar] [CrossRef]
- De Nevers, N. Air Pollutant Concentration Models. In Air Pollution Control Engineering, 3rd ed.; Waveland Press Inc.: Long Grove, IL, USA, 2017; pp. 120–160. ISBN 1-4786-2905-3. [Google Scholar]
- Turner, D.B. Estimates of Atmospheric Dispersion. In Workbook of Atmospheric Dispersion Estimates; Report AP-26; U.S. Environmental Protection Agency: Cincinnati, OH, USA, 1970. [Google Scholar]
- Marjovi, A.; Marques, L. Multi-Robot Odor Distribution Mapping in Realistic Time-Variant Conditions. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014. [Google Scholar] [CrossRef]
- Stockie, J.M. The mathematics of atmospheric dispersion modelling. SIAM Rev. 2011, 53, 349–372. [Google Scholar] [CrossRef]
- Loos, C.; Seppelt, R.; Meier-Bethke, S.; Shiemann, J.; Richter, O. Spatially explicit modelling of transgenic maize pollen dispersal and cross-pollination. J. Theor. Biol. 2003, 255, 241–255. [Google Scholar] [CrossRef]
- Murlis, J.; Elkinton, J.S.; Cardé, R.T. Odor plumes and how insects use them. Annu. Rev. Entomol. 1992, 37, 505–532. [Google Scholar] [CrossRef]
- Cha, J.; Lim, S.; Kim, T.; Shin, W.G. The effect of the Reynolds number on the velocity and temperature distributions of a turbulent condensing jet. Int. J. Heat Fluid Flow 2017, 67, 125–132. [Google Scholar] [CrossRef]
- Ferry, G.; Caselli, E.; Mattoli, V.; Mondini, A.; Mazzolai, B.; Dario, P. A novel biologically-inspired algorithm for gas/odor source localization in an indoor environment with no strong airflow. Robot. Auton. Syst. 2009, 57, 393–402. [Google Scholar] [CrossRef]
- Lilienthal, A.J.; Ulmer, H.; Fröhlich, H.; Stützle, A.; Werner, F.; Zell, A. Gas Source Declaration with a Mobile Robot. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar] [CrossRef]
- Taylor, G.I. Diffusion by continuous movements. Proc. Lond. Math. Soc. 1922, s2-20, 196–212. [Google Scholar] [CrossRef]
- Olver, F.W.J.; Lozier, D.W.; Boisvert, R.F.; Clark, C.W. 4.13 Lambert W-Function. In NIST Handbook of Mathematical Functions, 1st ed.; Cambridge University Press: New York, NY, USA, 2010; p. 111. ISBN 978-0-521-19225-5. [Google Scholar]
- Song, K.; Liu, Q.; Wang, Q. Olfaction and Hearing Based Mobile Robot Navigation for Odor/Sound Source Search. Sensors 2011, 11, 2129–2154. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Technical Information for TGS2620. Figaro Engineering Inc. Available online: http://www.figarosensor.com/products/entry/tgs2620.html#ti (accessed on 1 December 2018).
- Anfossi, D.; Brusasca, G.; Tinarelli, G. Simulation of Atmospheric Diffusion in Low Windspeed Meandering Conditions by a Monte Carlo Dispersion Model. Il Nuovo Cimento 1990, 13C, 995–1005. [Google Scholar] [CrossRef]












© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez-Sosa, J.E.; Castillo-Mixcóatl, J.; Beltrán-Pérez, G.; Muñoz-Aguirre, S. An Application of the Gaussian Plume Model to Localization of an Indoor Gas Source with a Mobile Robot. Sensors 2018, 18, 4375. https://doi.org/10.3390/s18124375
Sánchez-Sosa JE, Castillo-Mixcóatl J, Beltrán-Pérez G, Muñoz-Aguirre S. An Application of the Gaussian Plume Model to Localization of an Indoor Gas Source with a Mobile Robot. Sensors. 2018; 18(12):4375. https://doi.org/10.3390/s18124375
Chicago/Turabian StyleSánchez-Sosa, Jorge Edwin, Juan Castillo-Mixcóatl, Georgina Beltrán-Pérez, and Severino Muñoz-Aguirre. 2018. "An Application of the Gaussian Plume Model to Localization of an Indoor Gas Source with a Mobile Robot" Sensors 18, no. 12: 4375. https://doi.org/10.3390/s18124375