1. Introduction
Chaos is a unique nonlinear dynamical phenomenon with the properties of ergodicity, initial sensitivity, and the long-term unpredictability of motion trajectories [
1,
2,
3,
4]. In recent years, the study of chaos has become very popular, and it is widely used in the field of secure communication [
5,
6,
7]. Chaos control and synchronization theory, which has great potential for application in the field of chaos research, has also become a hot spot in the high-tech competition between countries [
8,
9]. From the point of view of chaotic system interactions, studies related to chaotic synchronization can be divided into the following categories: generalized synchronization, phase synchronization, hysteresis synchronization, and so on [
10,
11,
12,
13]. In addition, during the process of research, researchers have proposed complete synchronization, projective synchronization, and adaptive synchronization [
14,
15,
16,
17]. In practical studies, the problem of parameter selection is inevitable regarding the structural differences between the drive and response systems. The generalized synchronization problem for chaotic or hyperchaotic systems would be a more relevant and worthwhile approach, given that the problems mentioned above can be easily solved for generalized chaotic synchronization systems. Meanwhile, the development of generalized synchronization theory has provided new tools for constructing more secure communication systems.
Generalized synchronization is the gradual convergence of the trajectory curves of two chaotic systems to a time-independent transformation relationship over time; that is, a functional relationship is determined between the state of the driven system and the state of the responding system, and the synchronization of the driven and responding systems is achieved by this functional relationship, which can be deterministic or nondeterministic [
18,
19,
20,
21,
22]. This paper proposes a generalized chaotic synchronization method incorporating error-feedback coefficients into the process of determining the function relationships, which is based on the principle of using the relationships between the functions in the designed controller to synchronize the drive and response systems. Most of the systems used in practical engineering are high-dimensional nonlinear systems. With the continuous research in applied mathematical theory and the rapid development of computer technology, lower-dimensional chaotic systems in practical applications are facing more challenges; hence, high-dimensional hyperchaos with more than two Lyapunov exponents is of significant interest. Based on the above, new 3D and 6D discrete chaotic systems are constructed and proposed in this paper. The constructed new high-dimensional chaotic systems are used as the driving systems, and the response system is constructed by the proposed generalized chaotic synchronization method that incorporates error-feedback coefficients. The effectiveness of the synchronization method was confirmed by experiment.
The paper is organized as follows: The generalized synchronization theoretic of discrete chaotic systems and the stability principle of error systems are analyzed in
Section 2. A new 3D discrete chaotic system is proposed in
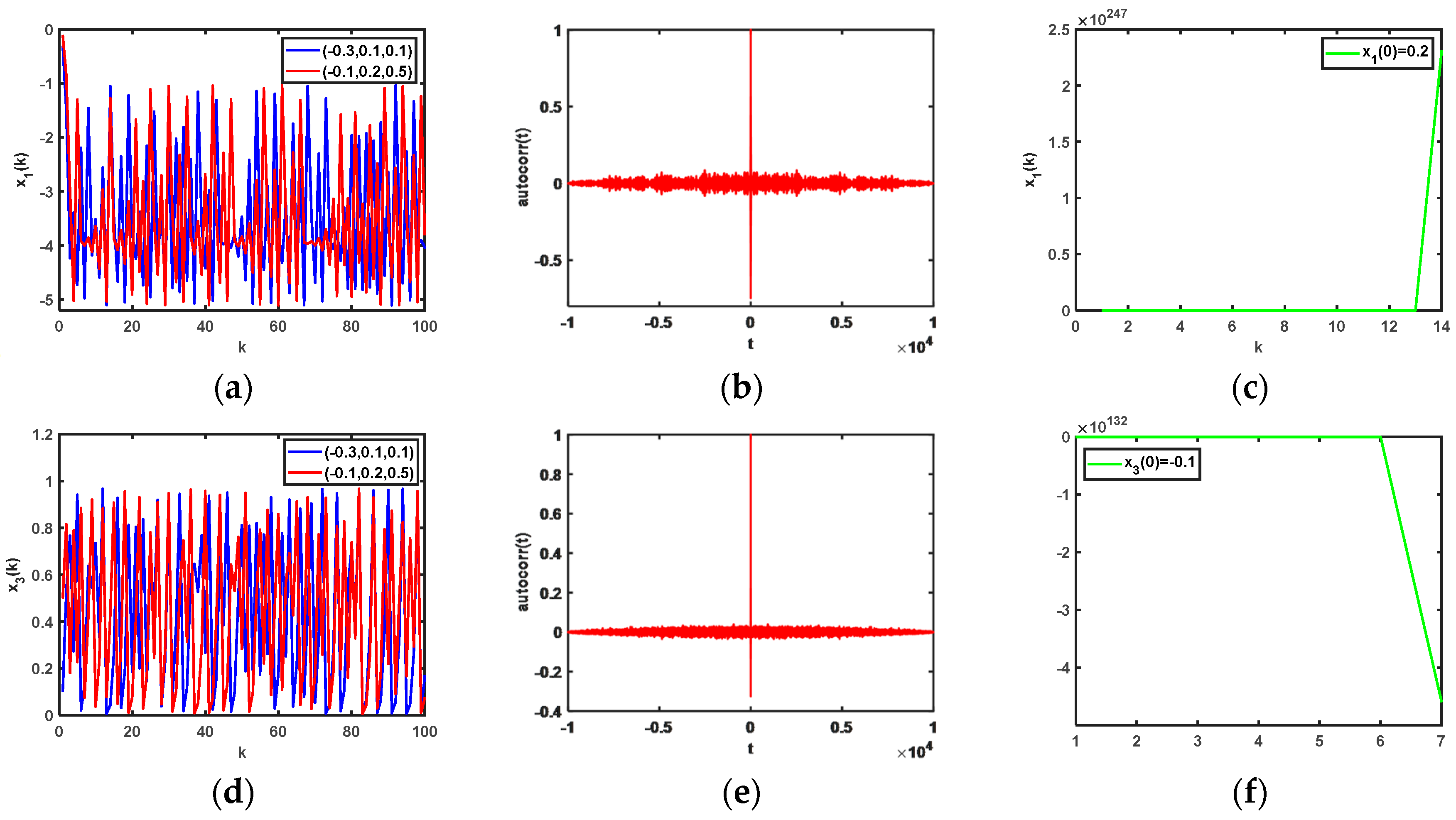
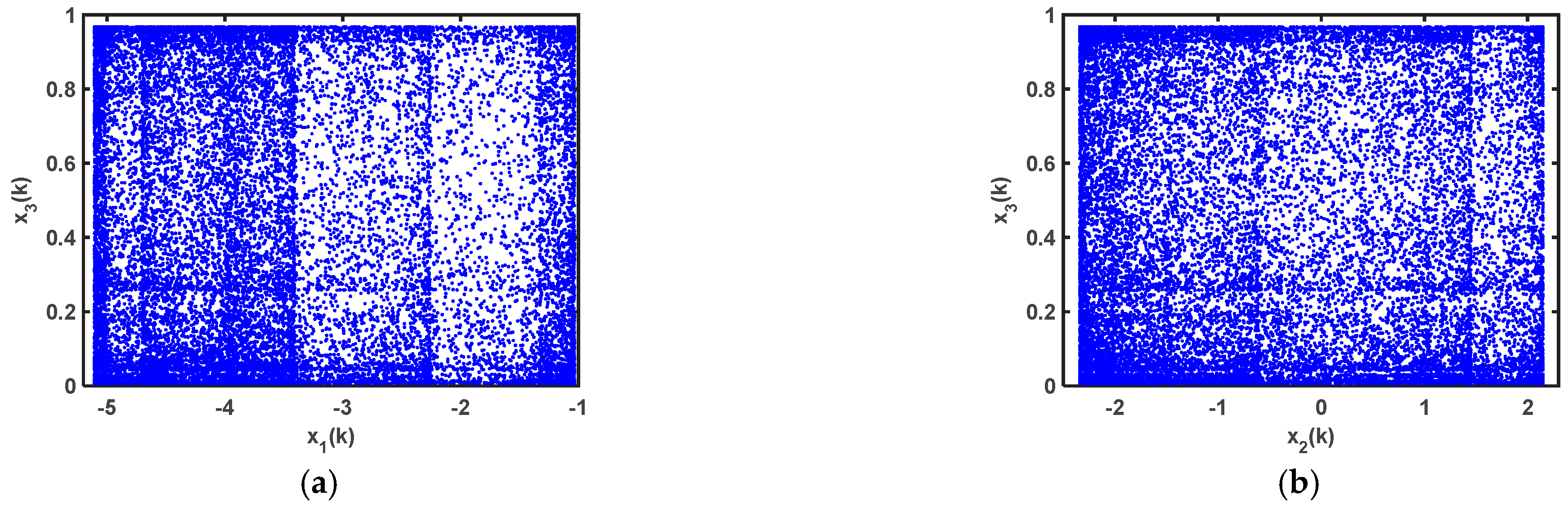
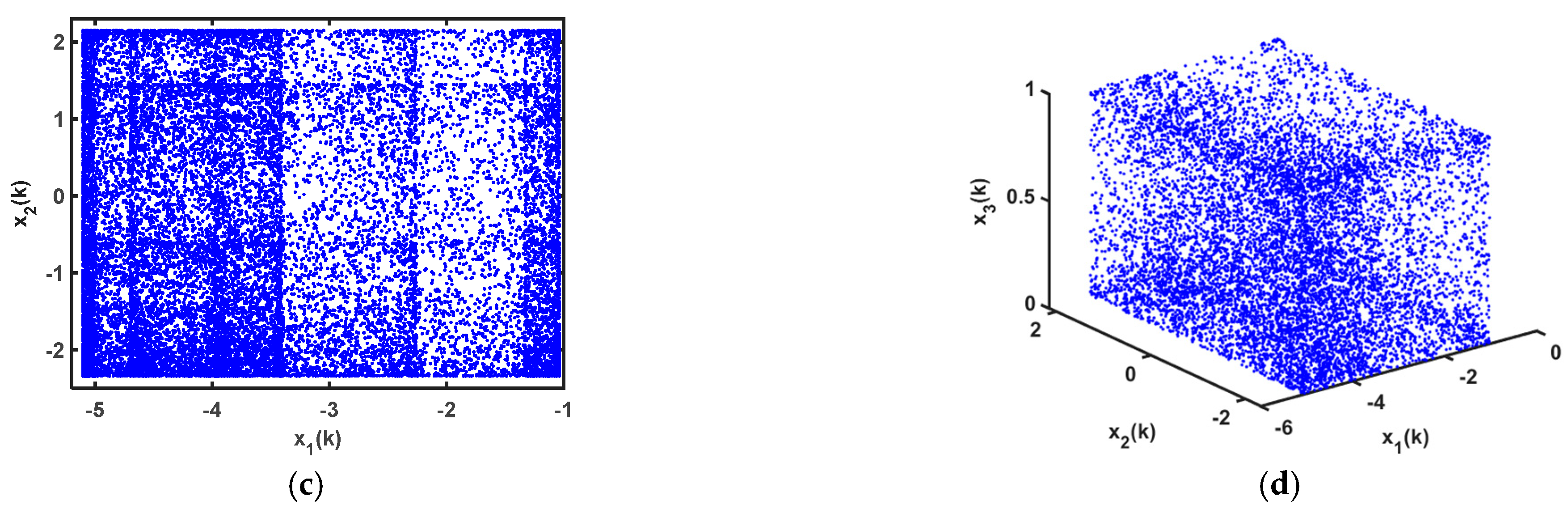
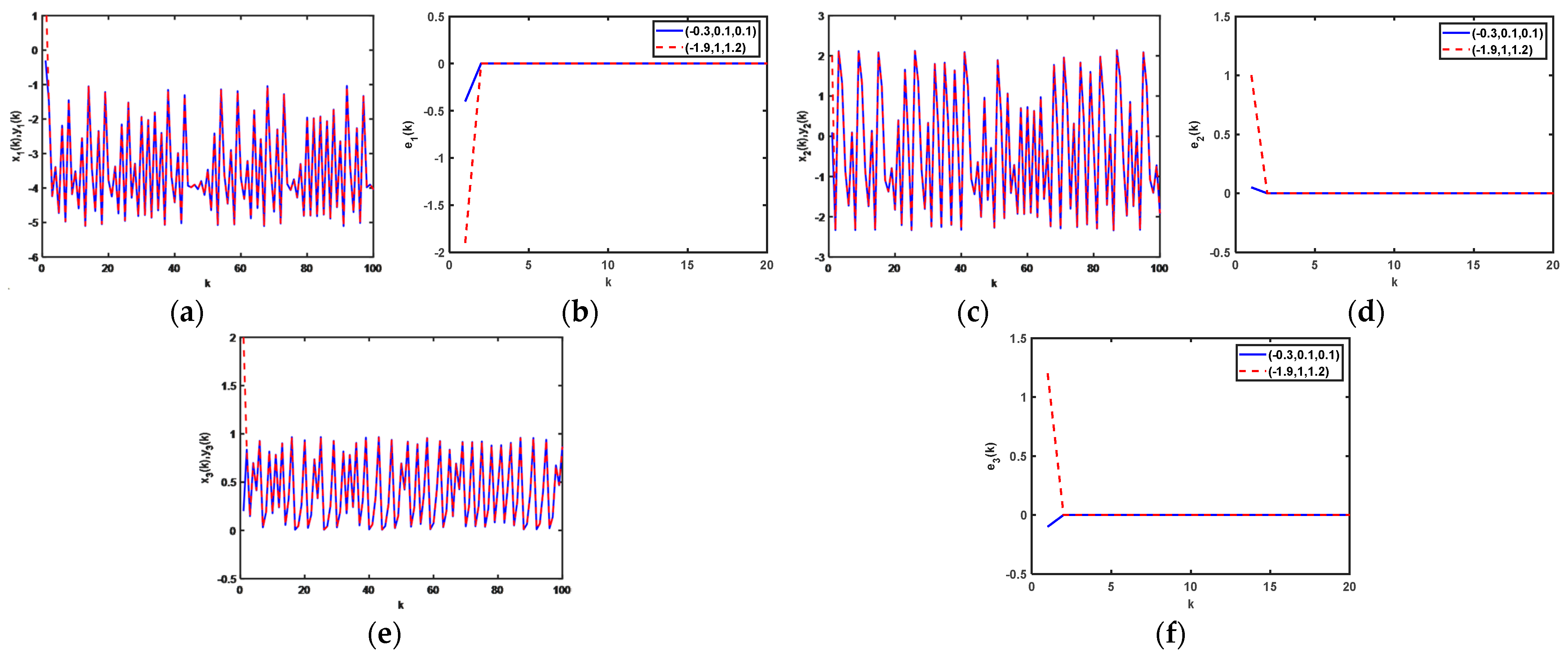
Section 3, in which the dynamic behavior of phase diagrams, Lyapunov exponent diagrams, and bifurcation diagrams are depicted and analyzed. Subsequently, a generalized chaotic synchronization method incorporating error-feedback coefficients is proposed, with a new 3D discrete chaotic system as the driving system. The effectiveness of the method was verified by experimental simulations. In
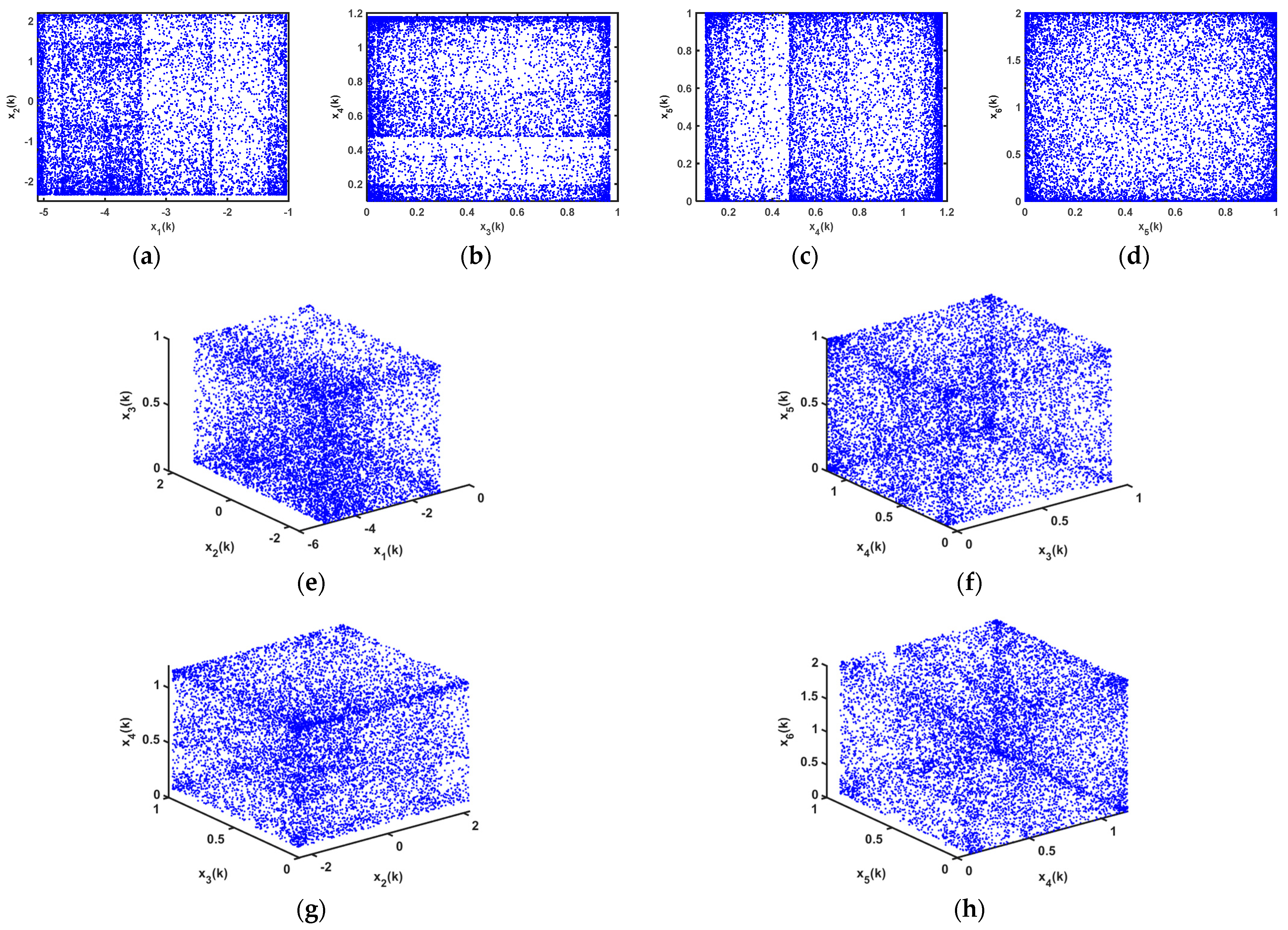
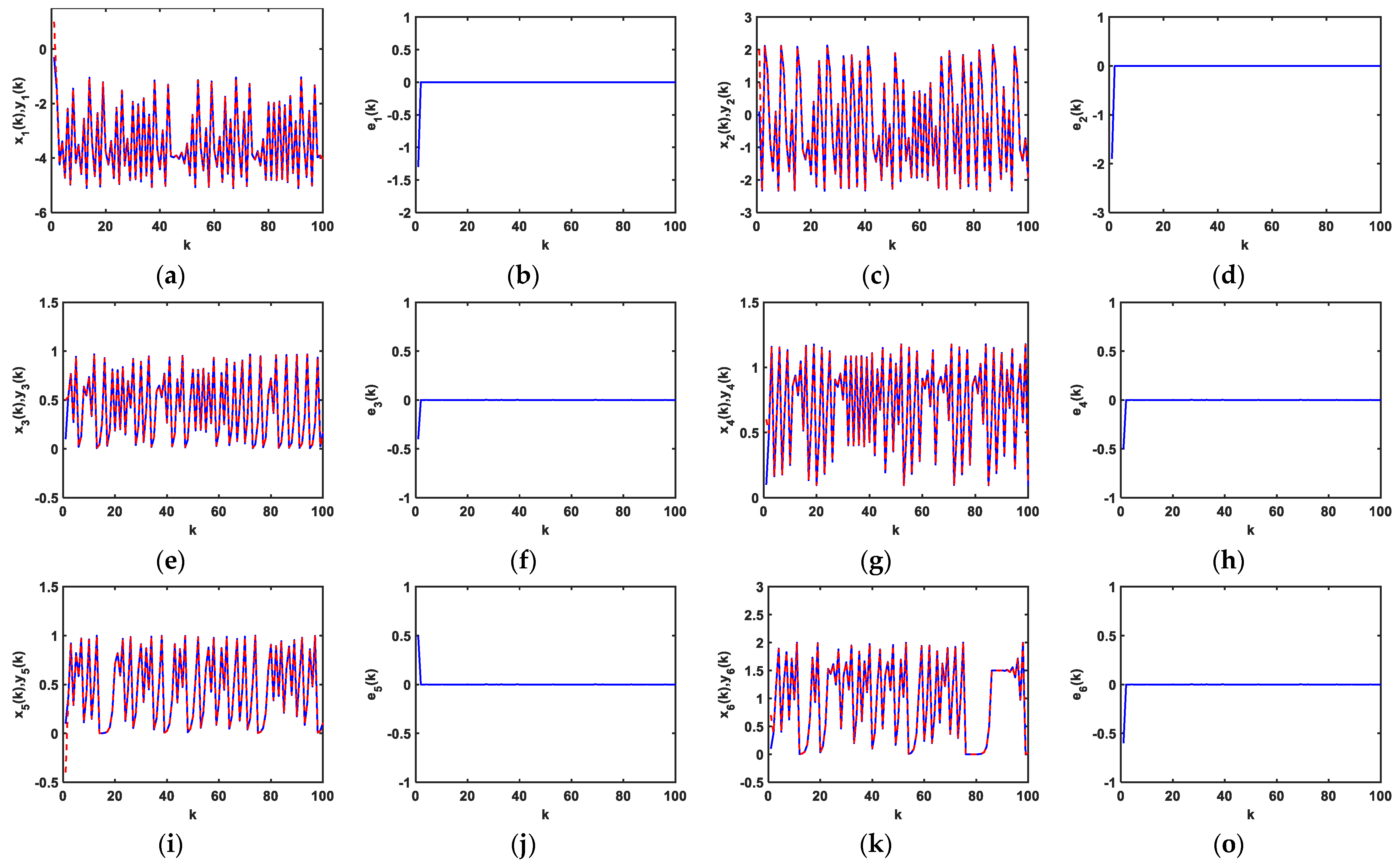
Section 4, a new 6D discrete chaotic system is proposed, and the dynamic behavioral properties of its phase diagram, Lyapunov exponent diagram, and bifurcation diagram are analyzed. Then, the new 6D discrete chaotic system is applied as the driving system through the proposed generalized chaotic synchronization method incorporating error-feedback coefficients; the effectiveness of the method was further demonstrated by performing simulations. In
Section 5, a digital image transmission system based on 6D chaotic synchronization and encryption is proposed, the encryption and decryption processes are analyzed in detail, and encryption and decryption simulations are given. Then, in
Section 6, security analyses are carried out based on the previously proposed encrypted image transmission system. Finally, the conclusion is given in the last section.
2. Theory of Generalized Synchronization for Discrete Chaotic Systems
In our study of chaotic control problems, it is more important to convert the problem of chaotic synchronization into the analysis of system errors. The main idea is to consider the difference in the state between the drive and response systems, that is, the synchronization error of the system. Once a reasonable controller has been designed by parameter changes to make the system error asymptotically stable at the origin point, then the two systems can be considered synchronized with each other. Firstly, the mathematical model of generalized chaotic synchronization is proposed in this paper and described, as follows.
Definition 1. Consider two n-dimensional nonlinear dynamical systems, and describe them using the following equations:where , , and as well as are n-dimensional nonlinear functions, and is an n-dimensional input control function. If the selectable function is applied such that , and thus , then it can be translated into the study of the error system , for which , and therefore . In this case, the drive system and response system can reach a generalized synchronization. Theorem 1. Define an invertible transform ();consequently, there is an incorporated error-feedback coefficient .Where the feedback coefficient satisfies the condition , it can enable the progressive stability of the zero solution of Error Equation (3) of the system, which is represented as follows: Because the zero solution of Equation (3) is gradually stable, by introducing a reasonable feedback coefficient (), the drive and response systems can be synchronized in a universal way.
Hence, according to Theorem 1, it can be concluded that to synchronize the drive system (1) and response system (2), a nonlinear error system () needs to be constructed, and the progressive stability of the error equation of the system () needs to be guaranteed. Based on the above, the next major concern is to determine that the system error equation is asymptotically stable at the original point; therefore, the following lemmas are given:
Lemma 1 ([
23])
. Given a linear discrete system, which can be defined as follows:where A is a coefficient matrix, and , we can draw the following conclusions:- (1)
Chaotic system (4) is progressively stable if the modulus of all eigenvalues of matrix A is not more than 1;
- (2)
In case there is a matrix (Q > 0), so that the Lyapunov equation (ATPA − P = −Q) has a unique positive solution (P), system (4) is asymptotically stable.
Proof of Lemma 1(
1)
. Set
, and then the tiny variables of
can be calculated as follows:
Because all the eigenvalues of matrix A have a value of modulo less than 1, all the eigenvalues of matrix are integers, which are less than 1; therefore, , and system (4) is asymptotically stable. □
Proof of Lemma 1(
2)
. Set
, where P is a positive definite matrix, given that
, and then the tiny variables of
can be calculated as follows:
Furthermore, ; hence, system (4) is asymptotically stable. □
Based on the proof processes for the stability of linear discrete systems as related in Lemma 1, the determination processes for the stability of nonlinear discrete systems can be given through Lemma 2, which is described as follows:
Lemma 2. For a nonlinear discrete system (), let (i.e., ) be the equilibrium point of the proposed system. Provided that the scalar function concerning satisfies the following:
- (1)
,
- (2)
.
then is progressively stable.
Proof of Lemma 2. For condition (1), let
, and in the case of
,
, the first condition is proven. For condition (2), let
. We can prove that P is a positive definite matrix from
Lemma 1. Moreover,
, and
; subsequently, the small changes (
) can be described (
), which are calculated as follows:
□
Thus, the proof of condition (2) is complete. Based on the above, it is concluded that nonlinear system (4) is asymptotically stable at the origin point.
Thus, having proved Lemma 1 and Lemma 2, the proof of Theorem 1 can be obtained, which is as follows:
Proof of Theorem 1. According to Equations (1) and (2), Equation (3) can be calculated as follows:
where
, and
is a control function, which be represented as follows:
Then, Equation (9) can be simplified as the following equation:
Denote the scaled function of the nonlinear error system (
) represented as
, and then the
is calculated as follows:
Therefore, when the parameter satisfies the condition , ; hence, and . □
Furthermore, . Thus, according to Lemma 2, the nonlinear error system () is asymptotically stable when , and, in turn, the drive and response systems are asymptotically synchronized.
5. Cryptographic Transmission System for Digital Images Based on Proposed Generalized Chaos Synchronization Approach
5.1. Cryptographic Transmission System for Digital Images
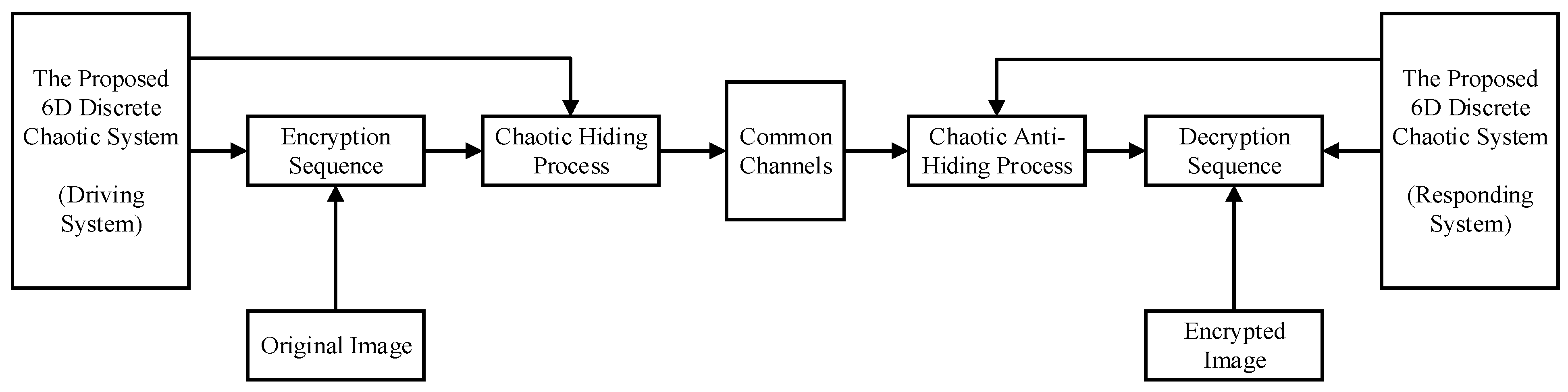
The framework diagram of the proposed encryption and decryption transmission system constructed in this paper is shown in
Figure 8.
The proposed system is designed for the encrypted transmission of digital images with pixel matrix values of , , and for each component of the color digital image, where the number of pixels in the image is . Then, matrix components are converted into a sequence of integer values in row order, and the pixel values are selected in the range , converting each pixel value into an 8-bit binary number. Based on the above operations, the binary sequences , , and , which are based on the color image, can be obtained, where .
The output sequences (
) of the proposed 6D generalized discrete chaotic system are quantized by the region to generate binary sequences for encryption. Therefore, the quantification process can be represented by the following equation:
where
is an arbitrary integer greater than 0, and
are denoted as
consecutive equal intervals on the interval of a range of real-valued sequences. If the output value of a chaotic sequence is in the odd interval, then it outputs 0, and if it is in the even interval, then it outputs 1.
The workflow of the whole system is as follows, and the process of encryption on the transmitter side of the proposed system consists of the following parts:
Step 1: The chaotic sequences generated by the proposed 6D discrete chaotic system are quantized and denoted as
,
,
, and
. Furthermore, the three color components of the original image are encrypted with chaotic sequences, and the calculation formula is Equation (31):
Step 2: The encrypted sequences of the three color components are combined into
using Equation (32):
Step 3: Chaotic hiding of
with the chaotic sequence
. The resulting mixed signal (
) is transmitted in the common channel and is calculated as the following equation:
On the receiving side of the proposed system, the response system will be in general synchronization with the driver system. Furthermore, the receiver will be able to decode all the state variables of the sender. Similarly, there are several parts to the decryption processes for the receiver of the proposed system.
Step 1: Reconstructing the chaotic signal (
), the sequences generated after quantization are denoted as
,
,
, and
, as we can see from
Figure 8. The decryption process is the inverse of the encryption process; thus, it is important to perform the anti-hiding operation on the signal
to obtain
, which is calculated as follows:
Step 2: Decompose
into three color components. The formulation is calculated as Equation (35), and therefore the encrypted image is decoded using Equation (36):
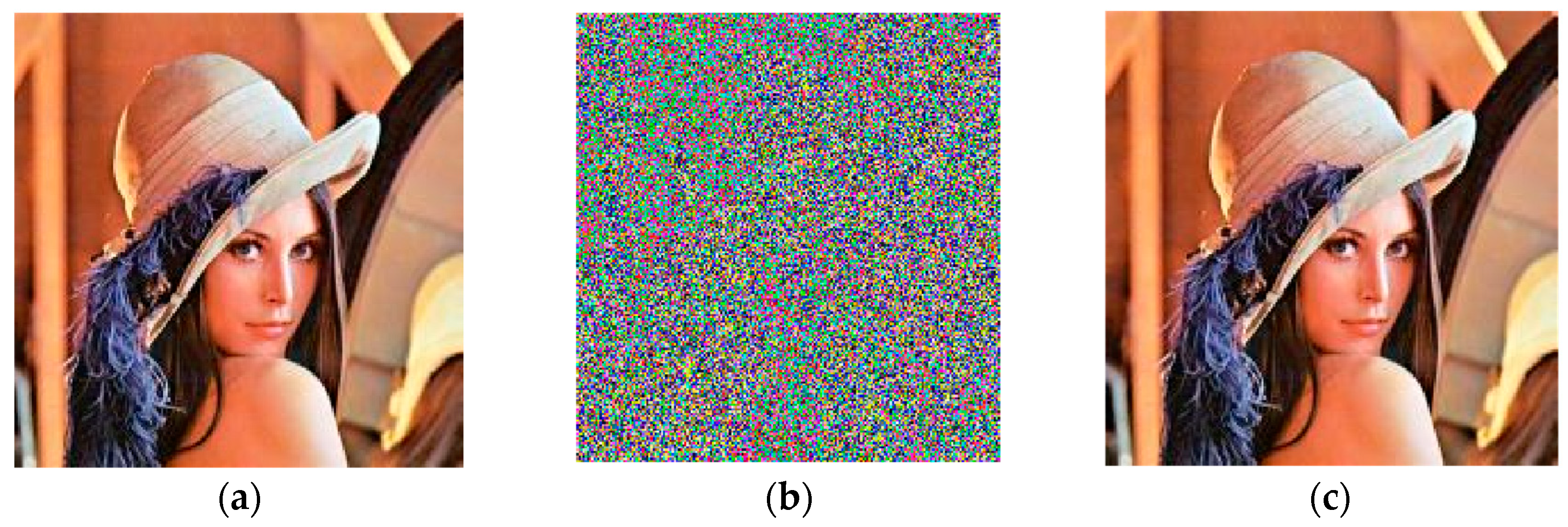
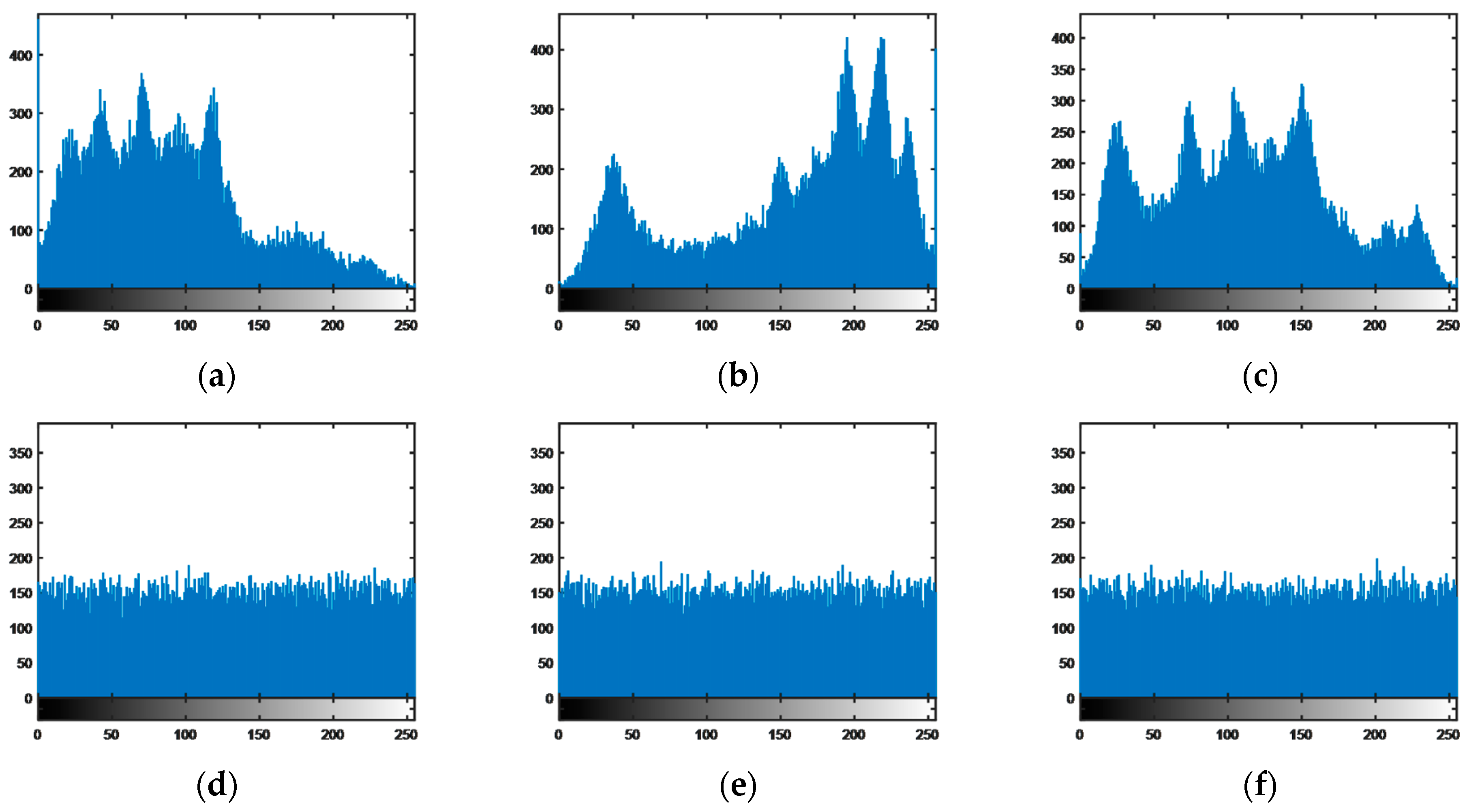
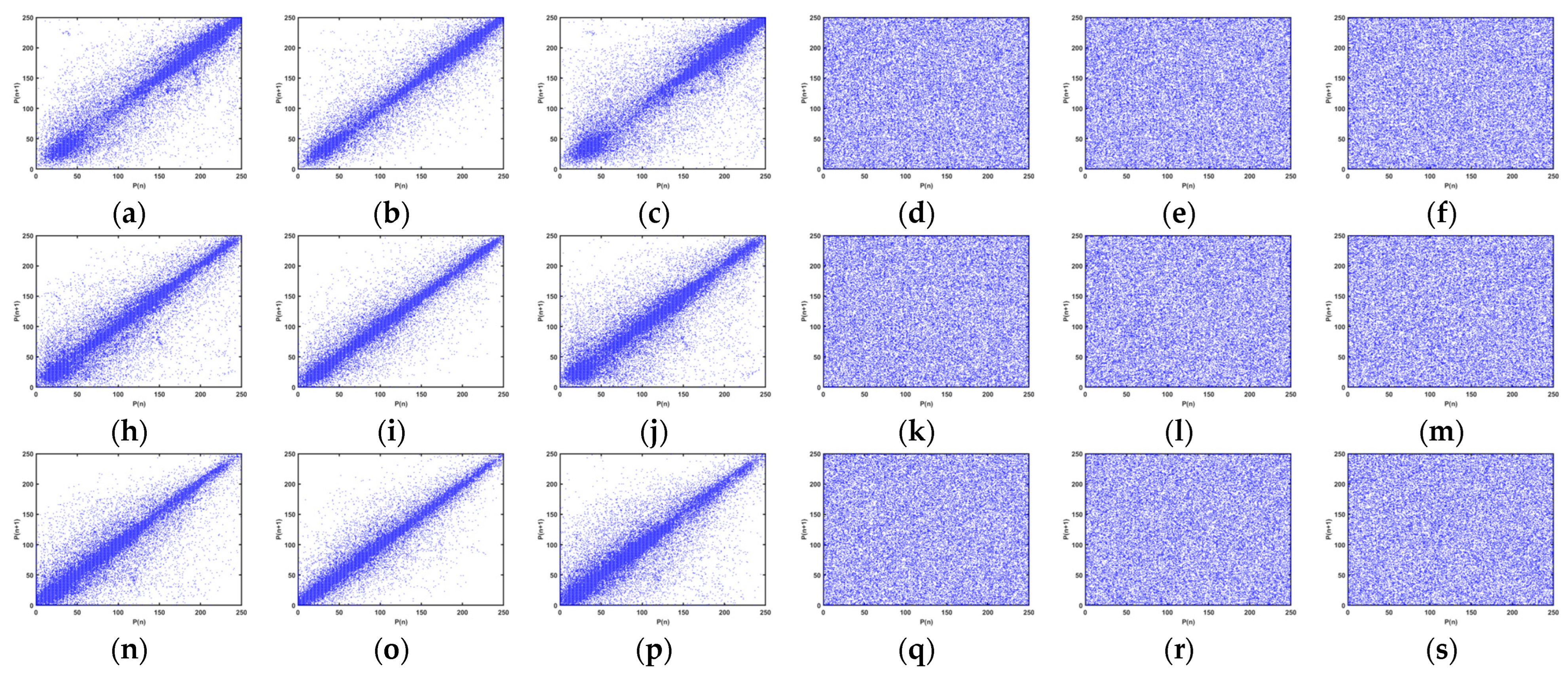
The standard Lena (256 × 256) image was used as an example for the encryption and decryption processes, and the results of the operation are shown in
Figure 9.
5.2. Time Complexity
As can be seen from the encryption process in
Section 5.1, the entire encryption algorithm consists of simple operations, such as addition, subtraction, and iso-or. However, in the process of encrypting a three-dimensional matrix of the size 8 ×
m ×
n, it takes about
operations to complete the bit-level operation of the encryption of the xor operation. Hence, the time complexity of the proposed algorithm in this paper is
.
7. Conclusions
In this paper, two discrete chaotic systems of different dimensions are constructed. Additionally, the dynamics of the new systems are analyzed, and the phase diagram, Lyapunov exponent diagram, and bifurcation diagram of the systems are presented and analyzed simultaneously. The proposed 3D and 6D discrete chaotic systems were constructed as drive systems, and the response systems were constructed by employing the new generalized synchronization method incorporating error-feedback coefficients. The experimental results show that the design of adaptive generalized synchronous systems can be realized provided that the feedback coefficient () of the error system satisfies certain conditions for the design of adaptive generalized synchronous systems. Further, the generalized synchronization method incorporating the error-feedback coefficient, and the incorporation of it into the controller, enables simpler and more flexible control of the generalized synchronization. Finally, a chaotic synchronization and encryption–decryption system for secure digital image transmission was constructed by applying the method of generalized synchronous chaotic systems incorporating the error-feedback coefficients devised in this paper. Due to the limited accuracy of the computer, the system proposed in this paper is more resistant to dynamic degradation and, hence, these features of high-dimensional chaotic systems play an active role and have very good theoretical value in image encryption as well as chaotic synchronization.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}