
An Explicit-Correction-Force Scheme of IB-LBM Based on Interpolated Particle Distribution Function
Abstract
:1. Introduction
2. Related Work
- Lattice Boltzmann Equation
- Immersed Boundary Method
- Lattice Boltzmann-Immersed Boundary Method in other Work
3. The Present Explicit Correction Force Scheme for IB-LBM
- (1)
- The discrete-velocity distribution function can be used as an interpolation physical quantity in the direction from Euler to Lagrangian in Equation (17). (The crash of our program may suggest that it cannot be used as an interpolation quantity from Lagrangian to Euler);
- (2)
- The velocity obtained from the solid Equations (21,22) on the Lagrangian point can be regarded as the equilibrium velocity of the LBM force model in Equation (8);
- (3)
- The force model of LBM in Equation (8) is still applicable at the Lagrangian point.
- Explicit Force by the Interpolated Distribution Function and LBM Force Models
- Theoretical Correction of Explicit Force by Correction Matrix
- The Total Process for FSI by the Proposed Method
4. Results
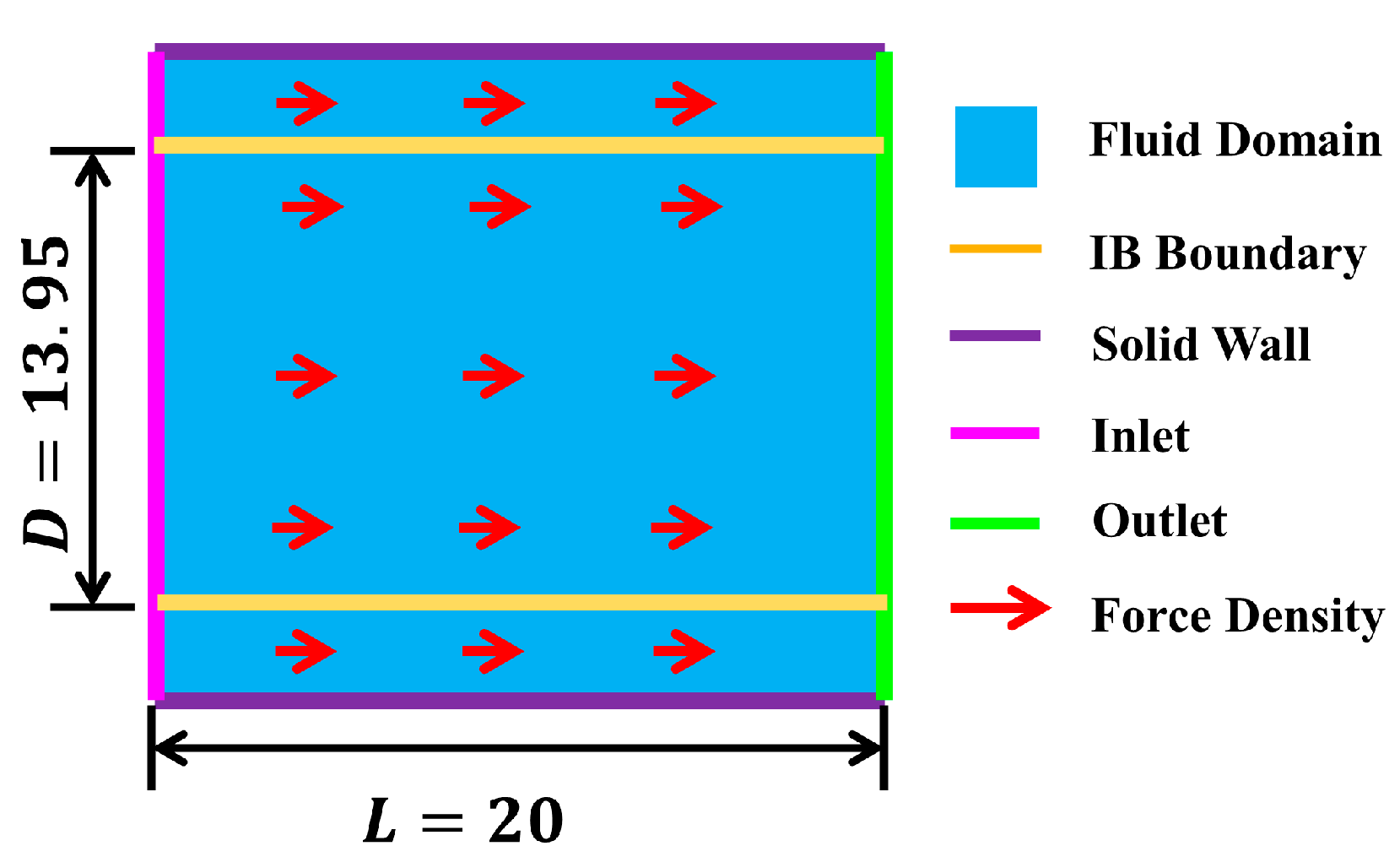
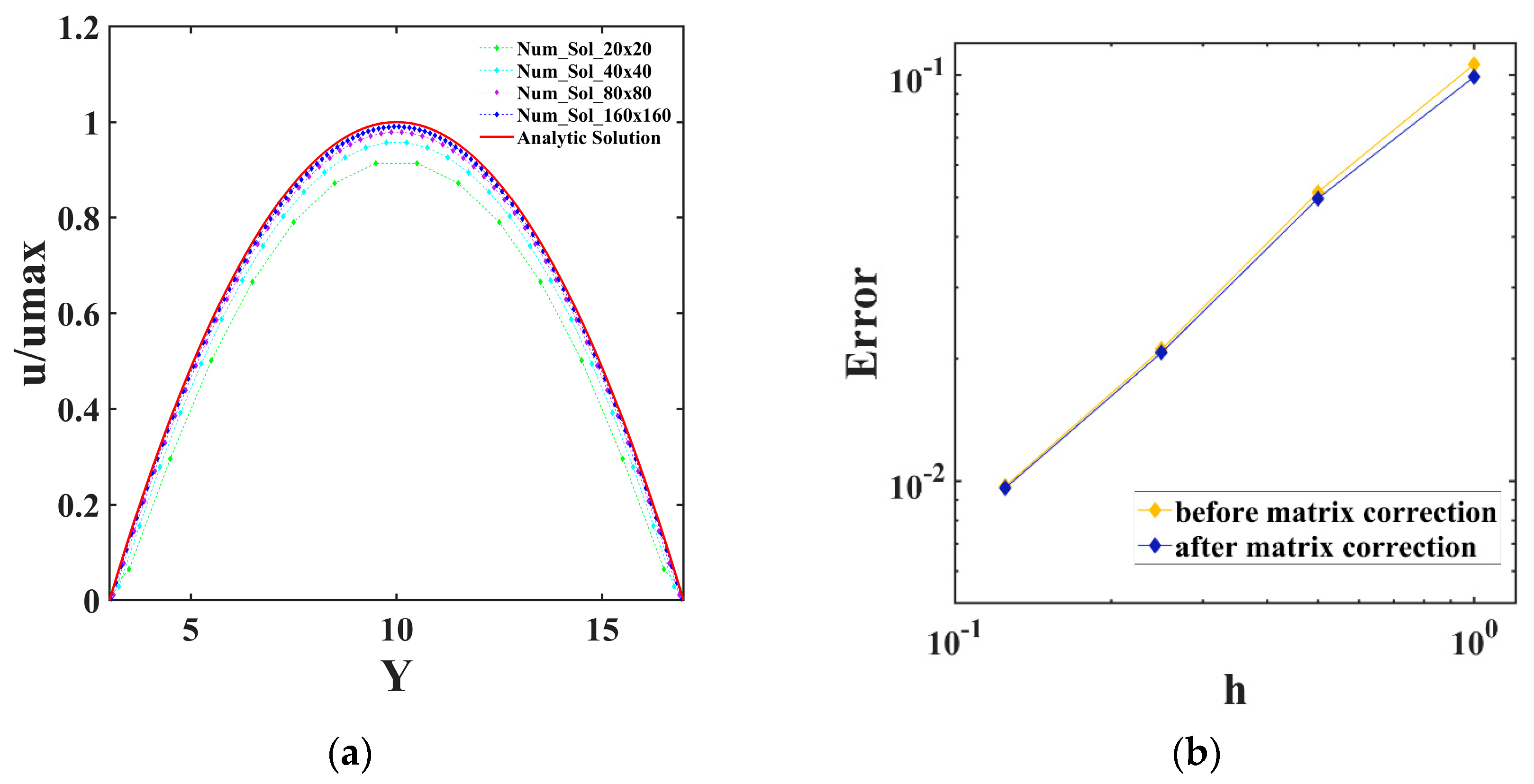
4.1. Plane Poiseuille Flow
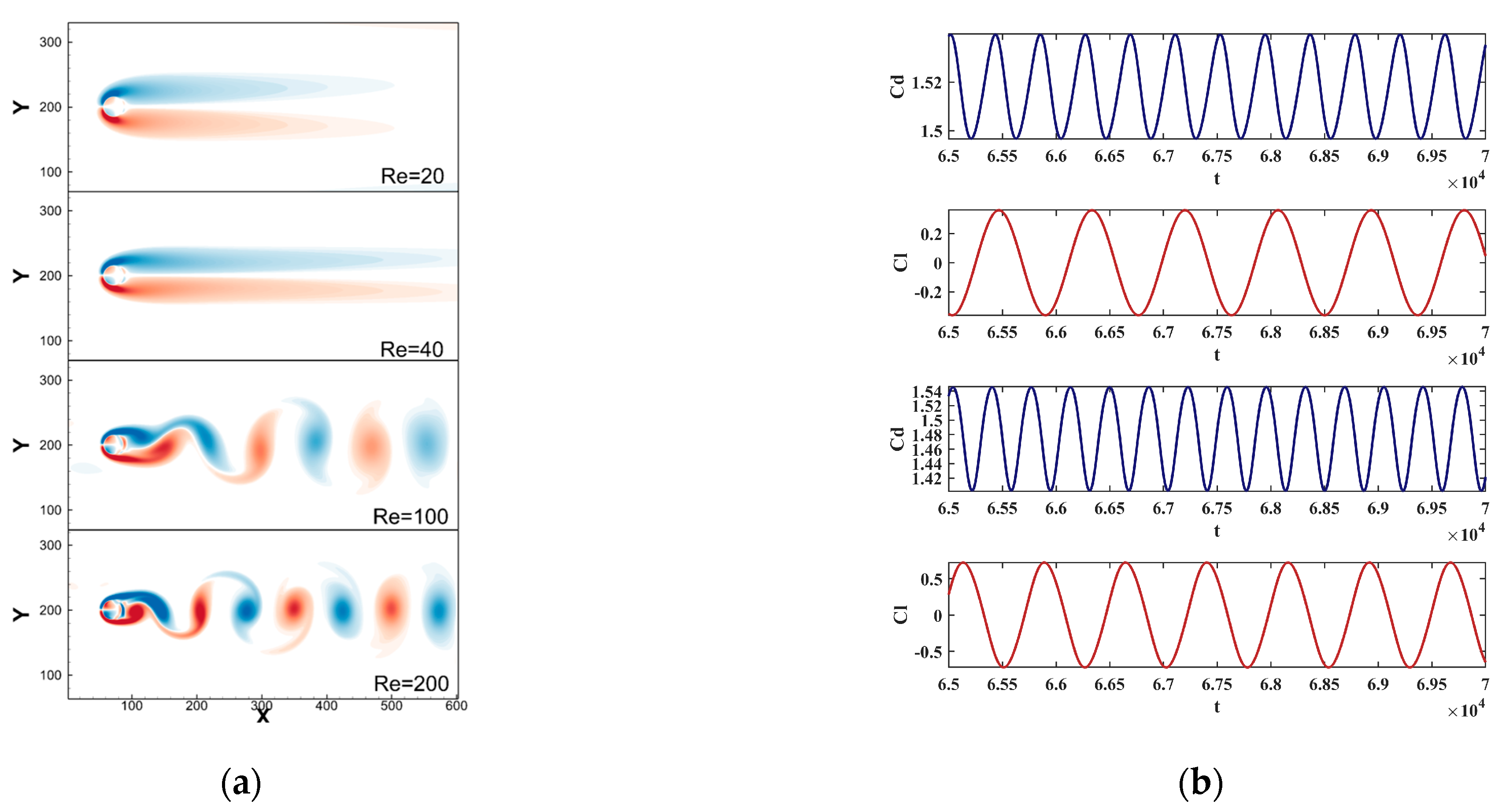
4.2. Flow over a Fixed Circular Cylinder
4.3. Free Oscillation of the Flapping Foil NACA0012
4.4. A Flow Past Free Deformation of Cylinders
5. Conclusions
- (1)
- We first obtained an explicit force with a simple form by assuming the existing LBM force model on IB in Equation (20). At present, the two most widely used explicit forces are a direct force proposed by Feng [33] and a bounce-back force proposed by Niu [44]. Feng’s direct force is similar to the stress integration method in LBM, and usually needs to calculate a complex stress tensor as in Equation (15); Niu’s bounce-back force is a combination of the bounce-back scheme and the momentum exchange method, and requires two steps: first, obtain the bounce-back distribution function (see [44] and a half-way bounce-back scheme optimized by Wang 2020 [48]), and then apply the momentum exchange method to obtain the interface force as in Equation (16). In contrast, our explicit force based on interpolating the distribution function and imposing the force model on the IB boundary can be realized in only one step, and the form is simple. Numerical experiments proved our force method and assumptions are accurate and effective;
- (2)
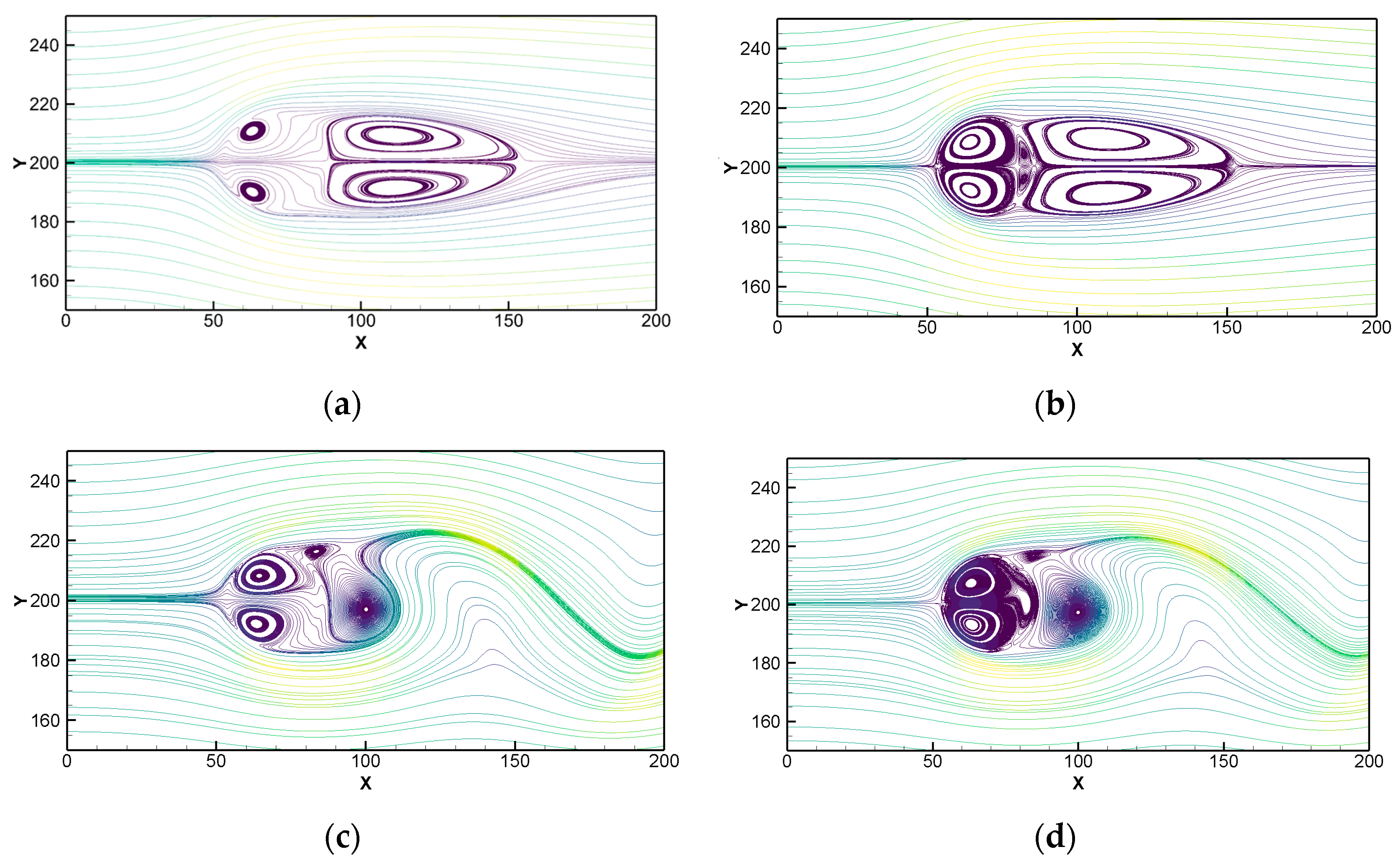
- Then, we obtained the total explicit correction force scheme in Equation (30) by the correction matrix, which is an explicit scheme, only needing to add a matrix to Equation (20). The correction matrix T is only determined by the geometric position updated at time , and the implicit scheme needs to solve the equation at time t. From the results of the clear streamline in Figure 6, the present scheme can well guarantee the local mass conservation, that is, almost satisfy the no-slip boundary condition, especially for the unsteady flow in Figure 6d and the large curvature boundary condition in Figure 7c. The correction matrix can be obtained by the LU decomposition method or some iterative methods;
- (3)
- The proposed explicit correction force scheme has two modes for the user to choose: the first mode is Equation (11) and the second mode is Equation (11) and Equation (12) to obtain the interface force. When the user conducts a large number of grids or three-dimensional conditions for numerical simulation, the first mode can be selected to ensure acceptable simulation time. For medium-scale simulation, we recommend the full explicit correction force scheme to ensure clear results at the interface;
- (4)
- For the accuracy order, we have the same order as the general IBM or IB-LBM, that is, the first-order accuracy order in Table 1. However, compared with the IBM by N-S solver, LBM has an excellent parallel strategy and local grid refinement strategy, which helps obtaining numerical simulation results with smaller errors;
- (5)
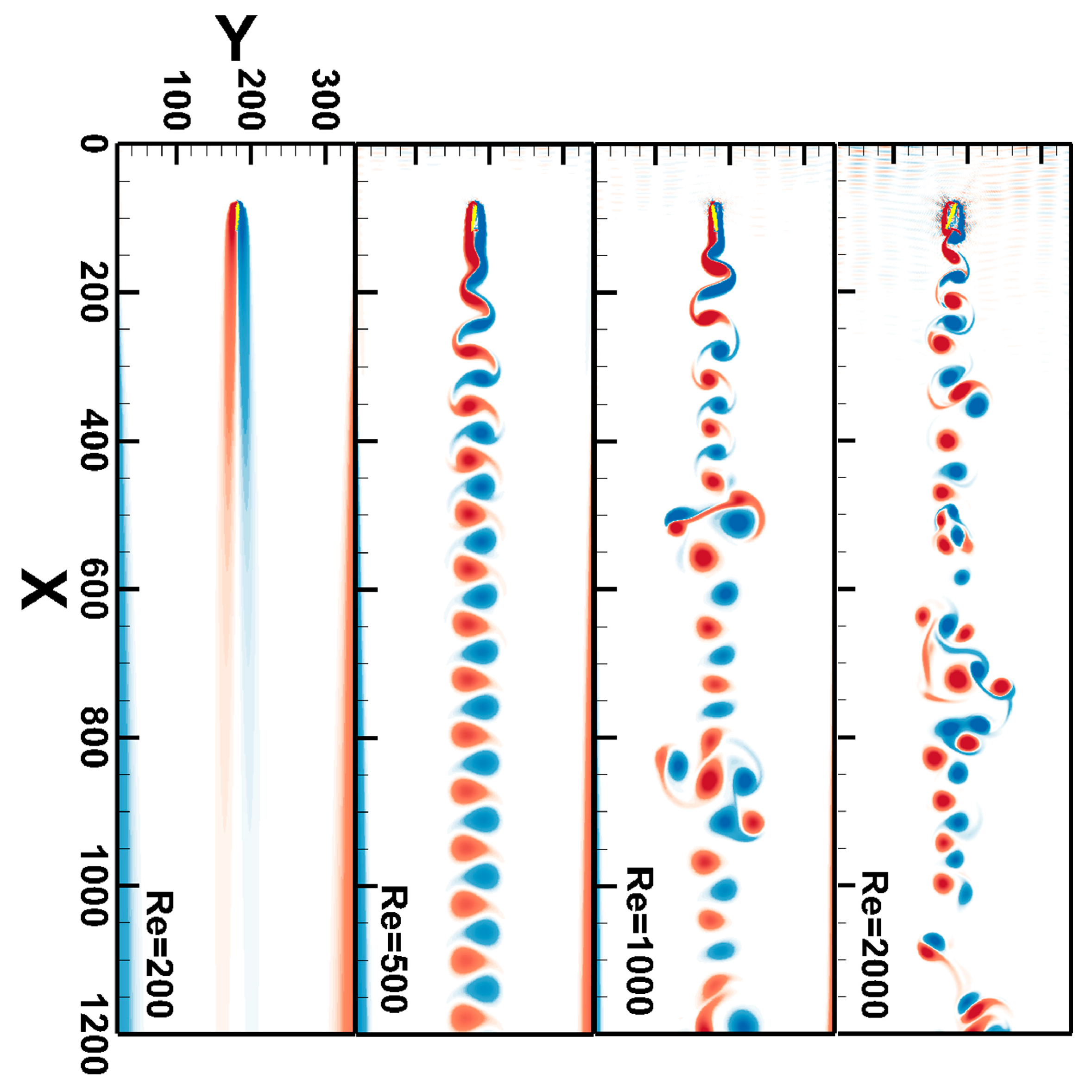
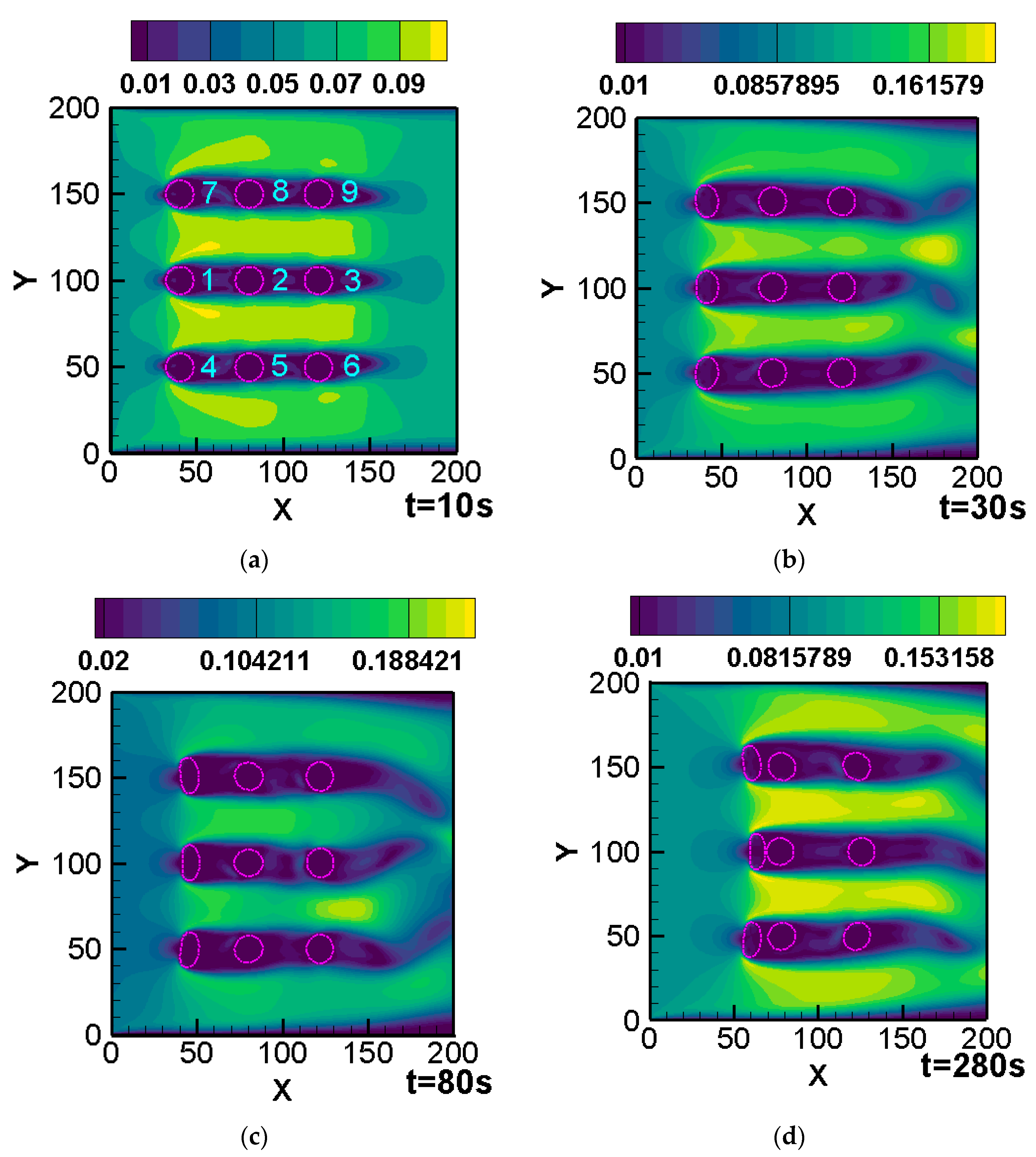
- The proposed scheme performed well on complex boundaries such as moving boundaries in Section 4.3 and flexible boundaries in Section 4.4. Although good simulation results can be achieved on flexible boundaries by improving traditional implicit methods, explicit methods have traditional advantages in simulating complex boundaries. The proposed reference models in Section 4.3 and Section 4.4 have a background in the relevant discipline or engineering, and researchers can improve the proposed reference model to achieve good simulation results in specific cases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Van Brummelen, E.H.; Geuzaine, P.J.B. Fundamentals of fluid-structure interaction. Encycl. Aerosp. Eng. 2010, 153, 1–7. [Google Scholar] [CrossRef]
- Wang, Y.; Shu, C.; Teo, C.J.; Wu, J. An immersed boundary-lattice Boltzmann flux solver and its applications to fluid–structure interaction problems. J. Fluids Struct. 2015, 54, 440–465. [Google Scholar] [CrossRef]
- Ma, J.; Wang, Z.; Young, J.; Lai, J.C.; Sui, Y.; Tian, F.B. An immersed boundary-lattice Boltzmann method for fluid-structure interaction problems involving viscoelastic fluids and complex geometries. J. Comput. Phys. 2020, 415, 109487. [Google Scholar] [CrossRef]
- Liu, F.; Liu, G.; Shu, C. Fluid–structure interaction simulation based on immersed boundary-lattice Boltzmann flux solver and absolute nodal coordinate formula. Phys. Fluids 2020, 32, 047109. [Google Scholar] [CrossRef]
- Karimnejad, S.; Delouei, A.A.; Başağaoğlu, H.; Nazari, M.; Shahmardan, M.; Falcucci, G.; Succi, S. A Review on Contact and Collision Methods for Multi-Body Hydrodynamic Problems in Complex Flows. Commun. Comput. Phys. 2022, 32, 899–950. [Google Scholar] [CrossRef]
- Le Tallec, P.; Mouro, J. Fluid structure interaction with large structural displacements. Comput. Methods Appl. Mech. Eng. 2001, 190, 3039–3067. [Google Scholar] [CrossRef]
- Hirt, C.W.; Amsden, A.A. An arbitrary Lagrangian-Eulerian computing method for all flow speeds. J. Comput. Phys. 1974, 14, 227–253. [Google Scholar] [CrossRef]
- Souli, M.; Ouahsine, A. ALE formulation for fluid–structure interaction problems. Comput. Methods Appl. Mech. Eng. 2000, 190, 659–675. [Google Scholar] [CrossRef]
- Peskin, C.S. Flow patterns around heart valves: A numerical method. J. Comput. Phys. 1972, 10, 252–271. [Google Scholar] [CrossRef]
- Sotiropoulos, F.; Yang, X. Immersed boundary methods for simulating fluid–structure interaction. Prog. Aerosp. Sci. 2014, 65, 7821–7836. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, X.; Li, Z. A smoothing technique for discrete delta functions with application to immersed boundary method in moving boundary simulations. J. Comput. Phys. 2009, 228, 7821–7836. [Google Scholar] [CrossRef]
- Bao, Y.; Kaye, J.; Peskin, C.S. A Gaussian-like immersed-boundary kernel with three continuous derivatives and improved translational invariance. J. Comput. Phys. 2016, 316, 139–144. [Google Scholar] [CrossRef] [Green Version]
- Fadlun, E.A.; Verzicco, R.; Orlandi, P.; Mohd-Yusof, J.C.D. Combined immersed-boundary finite-difference methods for three-dimensional complex flow simulations. J. Comput. Phys. 2000, 161, 35–60. [Google Scholar] [CrossRef]
- Yang, J.; Balaras, E. An embedded-boundary formulation for large-eddy simulation of turbulent flows interacting with moving boundaries. J. Comput. Phys. 2006, 215, 12–40. [Google Scholar] [CrossRef] [Green Version]
- Griffith, B.E.; Patankar, N.A. Immersed methods for fluid–structure interaction. Annu. Rev. Fluid Mech. 2020, 52, 421–448. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McNamara, G.R.; Zanetti, G. Use of the Boltzmann equation to simulate lattice-gas automata. Phys. Rev. Lett. 1988, 61, 2332. [Google Scholar] [CrossRef] [PubMed]
- Benzi, R.; Succi, S.; Vergassola, M. The lattice Boltzmann equation: Theory and applications. Phys. Rep. 1992, 222, 145–197. [Google Scholar] [CrossRef]
- Succi, S. The Lattice Boltzmann Equation: For Fluid Dynamics and Beyond, 1st ed.; Oxford University Press: New York, NY, USA, 2001; pp. 10–255. ISBN 0-19-850398-9. [Google Scholar]
- Krüger, T.; Kusumaatmaja, H.; Kuzmin, A.; Shardt, O. The Lattice Boltzmann Method: Principles and Practice, 1st ed.; Springer International Publishing: Cham, Switzerland, 2017; pp. 22–684. ISBN 978-3-319-44649-3. [Google Scholar]
- Bouzidi, M.H.; Firdaouss, M.; Lallemand, P. Momentum transfer of a Boltzmann-lattice fluid with boundaries. Phys. Fluids 2001, 13, 3452–3459. [Google Scholar] [CrossRef]
- Guo, Z.; Zheng, C.; Shi, B. An extrapolation method for boundary conditions in lattice Boltzmann method. Phys. Fluids 2002, 14, 2007–2010. [Google Scholar] [CrossRef]
- Ladd, A.J. Numerical simulations of particulate suspensions via a discretized Boltzmann equation. Part 1. Theoretical foundation. J. Fluid Mech. 1994, 271, 285–309. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, N.Q.; Ladd, A.J.C. Lubrication corrections for lattice-Boltzmann simulations of particle suspensions. Phys. Rev. E 2002, 66, 046708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ding, E.-J.; Aidun, C.K. Extension of the lattice-Boltzmann method for direct simulation of suspended particles near contact. J. Stat. Phys. 2003, 112, 685–708. [Google Scholar] [CrossRef]
- Başağaoğlu, H.; Succi, S.; Wyrick, D.; Blount, J. Particle shape influences settling and sorting behavior in microfluidic domains. Sci. Rep. 2018, 8, 8583. [Google Scholar] [CrossRef] [Green Version]
- Motta, J.B.; Costa, P.; Derksen, J.J.; Peng, C.; Wang, L.P.; Breugem, W.P.; Renon, N. Assessment of numerical methods for fully resolved simulations of particle-laden turbulent flows. Comput. Fluids 2019, 179, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Peng, Y.; Luo, L.S. A comparative study of immersed-boundary and interpolated bounce-back methods in LBE. Prog. Comput. Fluid Dyn. Int. J. 2008, 8, 156–167. [Google Scholar] [CrossRef] [Green Version]
- Saurabh, K.; Solovchuk, M.; Sheu, T.W.H. Investigating ion transport inside the pentameric ion channel encoded in COVID-19 E protein. Phys. Rev. E 2020, 102, 052408. [Google Scholar] [CrossRef] [PubMed]
- Afra, B.; Delouei, A.A.; Mostafavi, M.; Tarokh, A. Fluid-structure interaction for the flexible filament’s propulsion hanging in the free stream. J. Mol. Liq. 2021, 323, 114941. [Google Scholar] [CrossRef]
- Afra, B.; Karimnejad, S.; Delouei, A.A.; Tarokh, A. Flow control of two tandem cylinders by a highly flexible filament: Lattice spring IB-LBM. Ocean Eng. 2022, 250, 111025. [Google Scholar] [CrossRef]
- Cong, L.; Teng, B.; Bai, W.; Chen, B. A VOS based Immersed Boundary-Lattice Boltzmann method for incompressible fluid flows with complex and moving boundaries. Comput. Fluids 2023, 255, 105832. [Google Scholar] [CrossRef]
- Feng, Z.G.; Michaelides, E.E. The immersed boundary-lattice Boltzmann method for solving fluid–particles interaction problems. J. Comput. Phys. 2004, 195, 602–628. [Google Scholar] [CrossRef]
- Feng, Z.G.; Michaelides, E.E. Proteus: A direct forcing method in the simulations of particulate flows. J. Comput. Phys. 2005, 202, 20–51. [Google Scholar] [CrossRef]
- Feng, Z.G.; Michaelides, E.E. Robust treatment of no-slip boundary condition and velocity updating for the lattice-Boltzmann simulation of particulate flows. Comput. Fluids 2009, 38, 370–381. [Google Scholar] [CrossRef]
- Wu, J.; Shu, C. Implicit velocity correction-based immersed boundary-lattice Boltzmann method and its applications. J. Comput. Phys. 2009, 228, 1963–1979. [Google Scholar] [CrossRef]
- Wu, J.; Shu, C.; Zhang, Y.H. Simulation of incompressible viscous flows around moving objects by a variant of immersed boundary-lattice Boltzmann method. Int. J. Numer. Methods Fluids 2010, 62, 327–354. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Shu, C. Simulation of three-dimensional flows over moving objects by an improved immersed boundary–lattice Boltzmann method. Int. J. Numer. Methods Fluids 2012, 68, 977–1004. [Google Scholar] [CrossRef]
- Kang, S.K.; Hassan, Y.A. A comparative study of direct-forcing immersed boundary-lattice Boltzmann methods for stationary complex boundaries. Int. J. Numer. Methods Fluids 2011, 66, 1132–1158. [Google Scholar] [CrossRef]
- Seta, T.; Rojas, R.; Hayashi, K.; Tomiyama, A. Implicit-correction-based immersed boundary–lattice Boltzmann method with two relaxation times. Phys. Rev. E 2014, 89, 023307. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.Q.; Yan, Y.; Liu, G.R. An IB-LBM implementation for fluid-solid interactions with an MLS approximation for implicit coupling. Appl. Math. Model. 2018, 62, 638–653. [Google Scholar] [CrossRef]
- Gsell, S.; Favier, J. Direct-forcing immersed-boundary method: A simple correction preventing boundary slip error. J. Comput. Phys. 2021, 435, 110265. [Google Scholar] [CrossRef]
- Peng, C.; Wang, L.P. Force-amplified, single-sided diffused-interface immersed boundary kernel for correct local velocity gradient computation and accurate no-slip boundary enforcement. Phys. Rev. E 2020, 101, 053305. [Google Scholar] [CrossRef]
- Afra, B.; Nazari, M.; Kayhani, M.H.; Delouei, A.A.; Ahmadi, G. An immersed boundary-lattice Boltzmann method combined with a robust lattice spring model for solving flow–structure interaction problems. Appl. Math. Model. 2018, 55, 502–521. [Google Scholar] [CrossRef]
- Niu, X.D.; Shu, C.; Chew, Y.T. A momentum exchange-based immersed boundary-lattice Boltzmann method for simulating incompressible viscous flows. Phys. Lett. A 2006, 354, 173–182. [Google Scholar] [CrossRef]
- Hu, Y.; Yuan, H.; Shu, S.; Niu, X.; Li, M. An improved momentum exchanged-based immersed boundary–lattice Boltzmann method by using an iterative technique. Comput. Math. Appl. 2014, 68, 140–155. [Google Scholar] [CrossRef]
- Yuan, H.Z.; Niu, X.D.; Shu, S.; Li, M.; Yamaguchi, H. A momentum exchange-based immersed boundary-lattice Boltzmann method for simulating a flexible filament in an incompressible flow. Comput. Math. Appl. 2014, 67, 1039–1056. [Google Scholar] [CrossRef]
- Tao, S.; Chen, B.; Yang, X.; Huang, S. Second-order accurate immersed boundary-discrete unified gas kinetic scheme for fluid-particle flows. Comput. Fluids 2018, 165, 54–63. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, Y.; Qian, Y. A bounce back-immersed boundary-lattice Boltzmann model for curved boundary. Appl. Math. Model. 2020, 81, 428–440. [Google Scholar] [CrossRef]
- Peng, C.; Ayala, O.M.; Wang, L.P. A comparative study of immersed boundary method and interpolated bounce-back scheme for no-slip boundary treatment in the lattice Boltzmann method: Part I, laminar flows. Comput. Fluids 2019, 192, 104233. [Google Scholar] [CrossRef] [Green Version]
- Uhlmann, M. An immersed boundary method with direct forcing for the simulation of particulate flows. J. Comput. Phys. 2005, 209, 448–476. [Google Scholar] [CrossRef] [Green Version]
- Bhatnagar, P.L.; Gross, E.P.; Krook, M. A model for collision processes in gases. I. Small amplitude processes in charged and neutral one-component systems. Phys. Rev. 1954, 94, 511. [Google Scholar] [CrossRef]
- He, X.; Luo, L.S. Theory of the lattice Boltzmann method: From the Boltzmann equation to the lattice Boltzmann equation. Phys. Rev. E 1997, 56, 6811. [Google Scholar] [CrossRef] [Green Version]
- Guo, Z.; Zheng, C. Discrete lattice effects on the forcing term in the lattice Boltzmann method. Phys. Rev. E 2002, 65, 046308. [Google Scholar] [CrossRef] [PubMed]
- Qian, Y.H.; d’Humières, D.; Lallemand, P. Lattice BGK models for Navier-Stokes equation. Europhys. Lett. 1992, 17, 479. [Google Scholar] [CrossRef]
- Peskin, C.S. Numerical analysis of blood flow in the heart. J. Comput. Phys. 1972, 25, 220–252. [Google Scholar] [CrossRef]
- Peskin, C.S. The immersed boundary method. Acta Numer. 2002, 11, 479–517. [Google Scholar] [CrossRef] [Green Version]
- Cao, N.; Chen, S.; Jin, S.; Martinez, D. Physical symmetry and lattice symmetry in the lattice Boltzmann method. Phys. Rev. E 1997, 55, R21. [Google Scholar] [CrossRef]
- He, X.; Luo, L.S.; Dembo, M. Some progress in lattice Boltzmann method. Part I. Nonuniform mesh grids. J. Comput. Phys. 1996, 129, 357–363. [Google Scholar] [CrossRef] [Green Version]
- Stuart, J.T. On the non-linear mechanics of wave disturbances in stable and unstable parallel flows Part 1. The basic behaviour in plane Poiseuille flow. J. Fluid Mech. 1960, 9, 353–370. [Google Scholar] [CrossRef]
- Su, S.W.; Lai, M.C.; Lin, C.A. An immersed boundary technique for simulating complex flows with rigid boundary. Comput. Fluids 2007, 36, 313–324. [Google Scholar] [CrossRef]
- Zhao-Li, G.; Chu-Guang, Z.; Bao-Chang, S. Non-equilibrium extrapolation method for velocity and pressure boundary conditions in the lattice Boltzmann method. Chin. Phys. 2002, 11, 366. [Google Scholar] [CrossRef]
- Tritton, D.J. Experiments on the flow past a circular cylinder at low Reynolds numbers. J. Fluid Mech. 1959, 9, 547–567. [Google Scholar] [CrossRef]
- Calhoun, D.A. Cartesian grid method for solving the two-dimensional stream function-vorticity equations in irregular regions. J. Comput. Phys. 2002, 176, 231–275. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Zhang, X.; Tian, X.; Li, X.; Lu, W. A review on fluid dynamics of flapping foils. Ocean Eng. 2020, 195, 106712. [Google Scholar] [CrossRef]
- Verma, S.; Hemmati, A. Characterization of bifurcated dual vortex streets in the wake of an oscillating foil. J. Fluid Mech. 2022, 945, A7. [Google Scholar] [CrossRef]
- Imamura, T.; Suzuki, K.; Nakamura, T.; Yoshida, M. Flow simulation around an airfoil by lattice Boltzmann method on generalized coordinates. AIAA J. 2005, 43, 1968–1973. [Google Scholar] [CrossRef]
- Johnson, A.A.; Tezduyar, T.E. Mesh update strategies in parallel finite element computations of flow problems with moving boundaries and interfaces. Comput. Methods Appl. Mech. Eng. 1994, 119, 73–94. [Google Scholar] [CrossRef]
- Hellström, J.G.I.; Frishfelds, V.; Lundström, T.S. Mechanisms of flow-induced deformation of porous media. J. Fluid Mech. 2010, 664, 220–237. [Google Scholar] [CrossRef]
- Wang, R.; Wei, Y.; Wu, C.; Sun, L.; Zheng, W. Numerical simulations of the motion and deformation of three RBCs during poiseuille flow through a constricted vessel using IB-LBM. Comput. Math. Methods Med. 2018, 2018, 9425375. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | Rate | Rate | ||
|---|---|---|---|---|
| 0.0797334 | 0.0858161 | |||
| 0.0413924 | 0.9458183 | 0.0429297 | 0.9992722 | |
| 0.0207219 | 0.9982096 | 0.0211221 | 1.0232228 | |
| 0.00960611 | 1.1091321 | 0.00971167 | 1.1209620 |
| Parameter | Reference | Re = 200 | Re = 100 | Re = 40 | Re = 20 |
|---|---|---|---|---|---|
| Tritton [62] | 1.48 | 2.22 | |||
| Calhoun [63] | 1.17 | 1.33 | 1.62 | 2.19 | |
| Hu [45] | 1.394 | 1.418 | 1.660 | 2.213 | |
| This study | 1.471 | 1.518 | 1.755 | 2.335 | |
| Wu [35] | 0.344 | ||||
| Calhoun [63] | 0.67 | 0.298 | |||
| Hu [45] | 0.712 | 0.367 | |||
| This study | 0.711 | 0.3609 | |||
| Wu [35] | 0.197 | 0.163 | |||
| Calhoun [63] | 0.202 | 0.175 | |||
| Hu [45] | 0.195 | 0.166 | |||
| This study | 0.216 | 0.185 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Shi, W. An Explicit-Correction-Force Scheme of IB-LBM Based on Interpolated Particle Distribution Function. Entropy 2023, 25, 526. https://doi.org/10.3390/e25030526
Liu B, Shi W. An Explicit-Correction-Force Scheme of IB-LBM Based on Interpolated Particle Distribution Function. Entropy. 2023; 25(3):526. https://doi.org/10.3390/e25030526
Chicago/Turabian StyleLiu, Bowen, and Weiping Shi. 2023. "An Explicit-Correction-Force Scheme of IB-LBM Based on Interpolated Particle Distribution Function" Entropy 25, no. 3: 526. https://doi.org/10.3390/e25030526