
Quantum Annealing in the NISQ Era: Railway Conflict Management
 , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Railway Dispatching Problem on Single-Track Lines
2.1. Problem Description
2.2. Existing Algorithms
- Order and precedence variables prescribe the order in which a machine processes jobs, i.e., the order of trains passing a given block section in the railway dispatching problem on single-track lines.
- Discrete time units, in which the decision variables belong to discretized time instants; the binary variables describe whether the event happens at a given time.
2.3. Quantum Annealing and Related Methods
2.3.1. Ising-Based Solvers
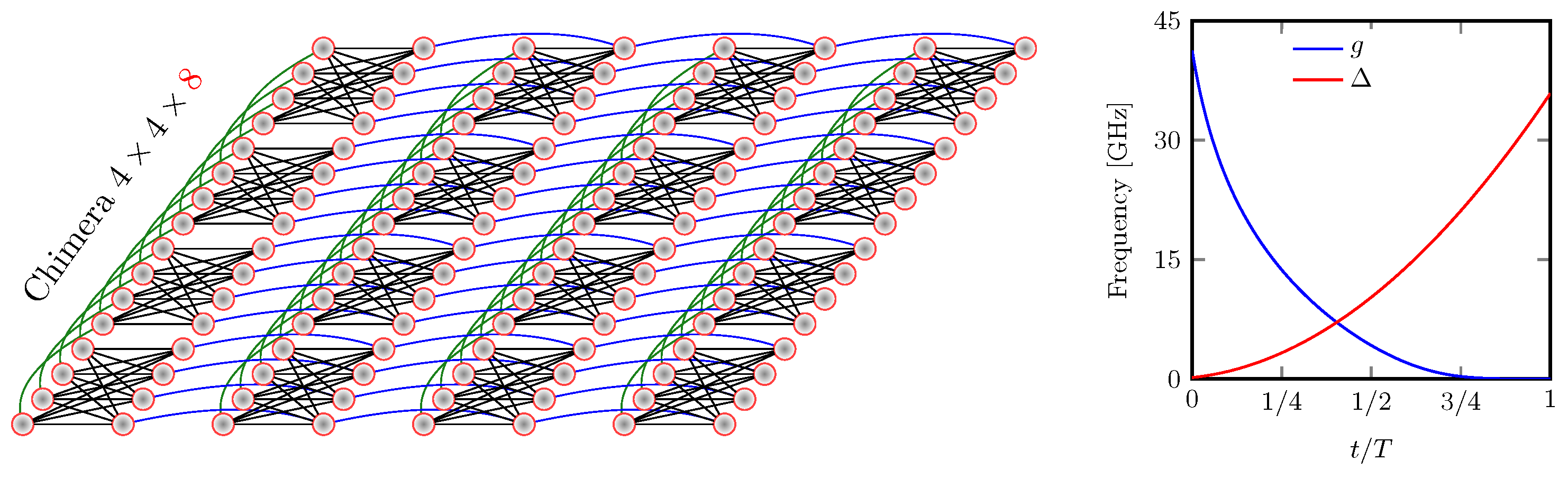
2.3.2. Quantum Annealing
2.3.3. Classical Algorithms for Solving Ising Problems
3. Our Model
3.1. Integer Formulation of the Constaints
3.2. 0-1 Formulation
3.3. QUBO Formulation: Penalties
4. Results
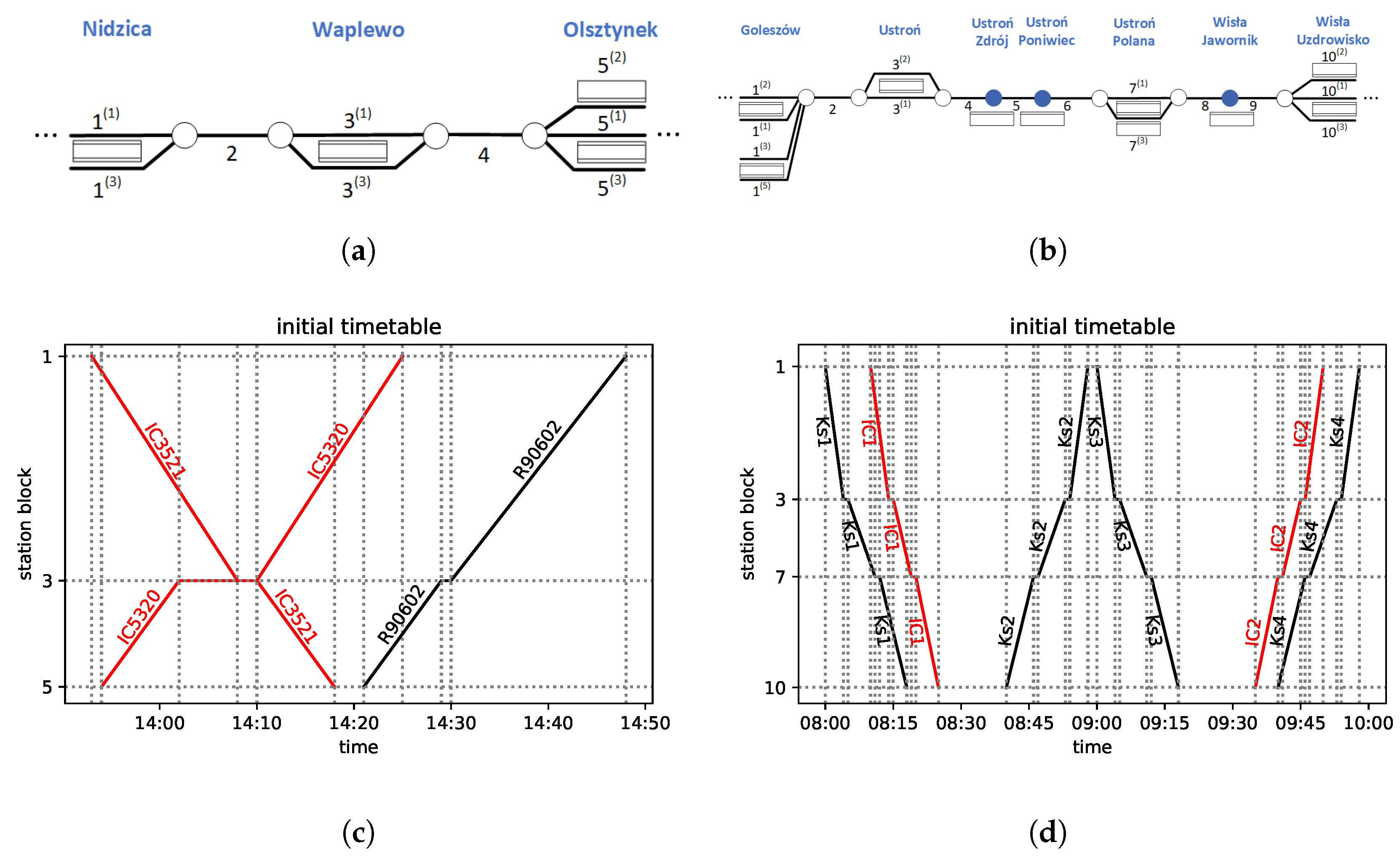
- Railway line No. 216 (Nidzica–Olsztynek section);
- Railway line No. 191 (Goleszów–Wisła Uzdrowisko section).
4.1. The Studied Network Segment
- 1.
- A moderate delay of the Inter-City train setting off from station block 1; see Figure S1a of the Supplemental Materials.
- 2.
- A moderate delay of all trains setting off from station block 1; see Figure S1b.
- 3.
- A significant delay of some trains setting off from station block 1; see Figure S1c.
- 4.
- A large delay of the Inter-City train setting off from station block 1; see Figure S1d.
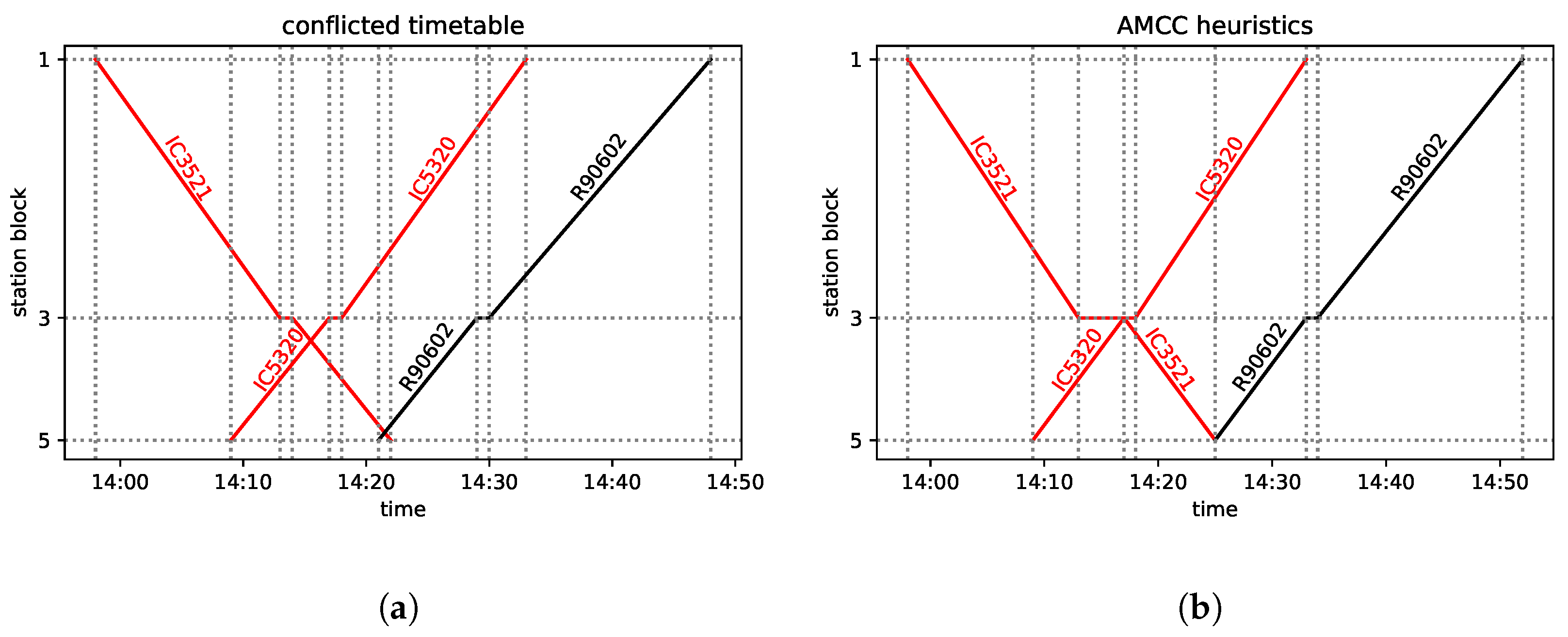
4.2. Simple Heuristics
4.3. Quantum and Calculated QUBO Solutions
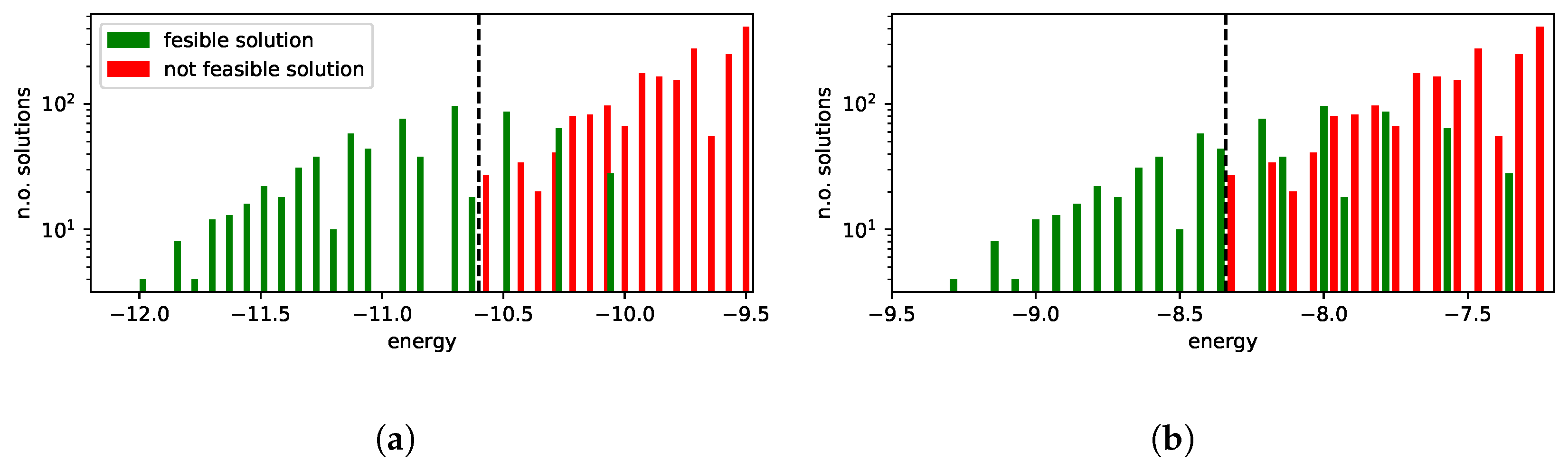
4.3.1. Exact Calculation of the Low-Energy Spectrum
4.3.2. Classical Algorithms for the Linear (Integer Programming) IP Model and QUBO
4.3.3. Quantum Annealing on the D-Wave Machine
4.4. Initial Studies on the D-Wave Advantage Machine
5. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Raymer, M.G.; Monroe, C. The US National Quantum Initiative. Quantum Sci. Technol. 2019, 4, 020504. [Google Scholar] [CrossRef]
- Riedel, M.; Kovacs, M.; Zoller, P.; Mlynek, J.; Calarco, T. Europe’s Quantum Flagship initiative. Quantum Sci. Technol. 2019, 4, 020501. [Google Scholar] [CrossRef]
- Yamamoto, Y.; Sasaki, M.; Takesue, H. Quantum information science and technology in Japan. Quantum Sci. Technol. 2019, 4, 020502. [Google Scholar] [CrossRef]
- Sussman, B.; Corkum, P.; Blais, A.; Cory, D.; Damascelli, A. Quantum Canada. Quantum Sci. Technol. 2019, 4, 020503. [Google Scholar] [CrossRef]
- Roberson, T.M.; White, A.G. Charting the Australian quantum landscape. Quantum Sci. Technol. 2019, 4, 020505. [Google Scholar] [CrossRef]
- Sanders, B.C. How to Build a Quantum Computer; IOP Publishing: Bristol, UK, 2017; pp. 2399–2891. [Google Scholar] [CrossRef]
- Aiello, C.D.; Awschalom, D.D.; Bernien, H.; Brower, T.; Brown, K.R.; Brun, T.A.; Caram, J.R.; Chitambar, E.; Felice, R.D.; Edmonds, K.M.; et al. Achieving a quantum smart workforce. Quantum Sci. Technol. 2021, 6, 030501. [Google Scholar] [CrossRef]
- Roberson, T.; Leach, J.; Raman, S. Talking about public good for the second quantum revolution: Analysing quantum technology narratives in the context of national strategies. Quantum Sci. Technol. 2021, 6, 025001. [Google Scholar] [CrossRef]
- Arute, F.; Arya, K.; Babbush, R.; Bacon, D.; Bardin, J.C.; Barends, R.; Biswas, R.; Boixo, S.; Brandao, F.G.S.L.; Buell, D.A.; et al. Quantum supremacy using a programmable superconducting processor. Nature 2019, 574, 505–510. [Google Scholar] [CrossRef] [Green Version]
- Preskill, J. Quantum Computing in the NISQ era and beyond. Quantum 2018, 2, 79. [Google Scholar] [CrossRef]
- Dattani, N.; Szalay, S.; Chancellor, N. Pegasus: The second connectivity graph for large-scale quantum annealing hardware. arXiv 2019, arXiv:1901.07636. [Google Scholar]
- Więckowski, A.; Deffner, S.; Gardas, B. Disorder-assisted graph coloring on quantum annealers. Phys. Rev. A 2019, 100, 062304. [Google Scholar] [CrossRef] [Green Version]
- Sax, I.; Feld, S.; Zielinski, S.; Gabor, T.; Linnhoff-Popien, C.; Mauerer, W. Approximate approximation on a quantum annealer. In Proceedings of the 17th ACM International Conference on Computing Frontiers, Catania, Italy, 11–13 May 2020; pp. 108–117. [Google Scholar]
- Stollenwerk, T.; O’Gorman, B.; Venturelli, D.; Mandrà, S.; Rodionova, O.; Ng, H.; Sridhar, B.; Rieffel, E.G.; Biswas, R. Quantum Annealing Applied to De-Conflicting Optimal Trajectories for Air Traffic Management. IEEE Trans. Intell. Transp. Syst. 2020, 21, 285–297. [Google Scholar] [CrossRef] [Green Version]
- Domino, K.; Koniorczyk, M.; Krawiec, K.; Jałowiecki, K.; Gardas, B. Quantum computing approach to railway dispatching and conflict management optimization on single-track railway lines. arXiv 2020, arXiv:2010.08227. [Google Scholar]
- Grozea, C.; Hans, R.; Koch, M.; Riehn, C.; Wolf, A. Optimising Rolling Stock Planning including Maintenance with Constraint Programming and Quantum Annealing. arXiv 2021, arXiv:2109.07212. [Google Scholar]
- Yarkoni, S.; Huck, A.; Schülldorf, H.; Speitkamp, B.; Tabrizi, M.S.; Leib, M.; Bäck, T.; Neukart, F. Solving the Shipment Rerouting Problem with Quantum Optimization Techniques. In Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2021; pp. 502–517. [Google Scholar] [CrossRef]
- Cacchiani, V.; Huisman, D.; Kidd, M.; Kroon, L.; Toth, P.; Veelenturf, L.; Wagenaar, J. An overview of recovery models and algorithms for real-time railway rescheduling. Transp. Res. Part B Methodol. 2014, 63, 15–37. [Google Scholar] [CrossRef] [Green Version]
- Törnquist, J.; Persson, J.A. N-tracked railway traffic re-scheduling during disturbances. Transp. Res. Part B Methodol. 2007, 41, 342–362. [Google Scholar] [CrossRef]
- Lamorgese, L.; Mannino, C.; Pacciarelli, D.; Krasemann, J.T. Handbook of Optimization in the Railway Industry. In Train Dispatching; Springer International Publishing: Cham, Switzerland, 2018; pp. 265–283. [Google Scholar] [CrossRef]
- Jensen, J.; Nielsen, O.; Prato, C. Passenger Perspectives in Railway Timetabling: A Literature Review. Transp. Rev. 2016, 36, 500–526. [Google Scholar] [CrossRef]
- Wen, C.; Huang, P.; Li, Z.; Lessan, J.; Fu, L.; Jiang, C.; Xu, X. Train Dispatching Management With Data- Driven Approaches: A Comprehensive Review and Appraisal. IEEE Access 2019, 7, 114547–114571. [Google Scholar] [CrossRef]
- Van Leeuwen, J. Handbook of Theoretical Computer Science (vol. A) Algorithms and Complexity; MIT Press: Cambridge, MA, USA, 1991. [Google Scholar]
- Cai, X.; Goh, C.J. A fast heuristic for the train scheduling problem. Comput. Oper. Res. 1994, 21, 499–510. [Google Scholar] [CrossRef]
- Szpigel, B. Optimal train scheduling on a single line railway. Oper. Res. 1973, 72, 343–352. [Google Scholar]
- Pinedo, M.L. Scheduling: Theory, Algorithms, and Systems, 3rd ed.; Springer Publishing Company, Incorporated: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Cordeau, J.F.; Toth, P.; Vigo, D. A Survey of Optimization Models for Train Routing and Scheduling. Transp. Sci. 1998, 32, 380–404. [Google Scholar] [CrossRef]
- Törnquist, J. Computer-based decision support for railway traffic scheduling and dispatching: A review of models and algorithms. In Proceedings of the 5th Workshop on Algorithmic Methods and Models for Optimization of Railways (ATMOS’05), Schloss Dagstuhl-Leibniz-Zentrum für Informatik, Palma de Mallorca, Spain, 14 September 2005. [Google Scholar]
- Dollevoet, T.; Huisman, D.; Schmidt, M.; Schöbel, A. Delay Propagation and Delay Management in Transportation Networks. In Handbook of Optimization in the Railway Industry; Springer International Publishing: Cham, Switzerland, 2018; pp. 285–317. [Google Scholar] [CrossRef]
- Corman, F.; Meng, L. A Review of Online Dynamic Models and Algorithms for Railway Traffic Management. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1274–1284. [Google Scholar] [CrossRef]
- Cacchiani, V.; Toth, P. Nominal and robust train timetabling problems. Eur. J. Oper. Res. 2012, 219, 727–737. [Google Scholar] [CrossRef]
- Hansen, I. State-of-the-art of railway operations research. In Timetable Planning and Information Quality; WIT Press: Wessex, UK, 2010; pp. 35–47. [Google Scholar]
- Lange, J.; Werner, F. Approaches to modeling train scheduling problems as job-shop problems with blocking constraints. J. Sched. 2018, 21, 191–207. [Google Scholar] [CrossRef]
- Mascis, A.; Pacciarelli, D. Job-shop scheduling with blocking and no-wait constraints. Eur. J. Oper. Res. 2002, 143, 498–517. [Google Scholar] [CrossRef]
- D’Ariano, A.; Pacciarelli, D.; Pranzo, M. A branch and bound algorithm for scheduling trains in a railway network. Eur. J. Oper. Res. 2007, 183, 643–657. [Google Scholar] [CrossRef]
- Venturelli, D.; Marchand, D.J.J.; Rojo, G. Quantum Annealing Implementation of Job-Shop Scheduling. arXiv 2015, arXiv:1506.08479. [Google Scholar]
- Zhou, X.; Zhong, M. Single-track train timetabling with guaranteed optimality: Branch-and-bound algorithms with enhanced lower bounds. Transp. Res. Part B Methodol. 2007, 41, 320–341. [Google Scholar] [CrossRef]
- Harrod, S. Modeling Network Transition Constraints with Hypergraphs. Transp. Sci. 2011, 45, 81–97. [Google Scholar] [CrossRef]
- Meng, L.; Zhou, X. Simultaneous train rerouting and rescheduling on an N-track network: A model reformulation with network-based cumulative flow variables. Transp. Res. Part B Methodol. 2014, 67, 208–234. [Google Scholar] [CrossRef]
- Kadowaki, T.; Nishimori, H. Quantum annealing in the transverse Ising model. Phys. Rev. E 1998, 58, 5355–5363. [Google Scholar] [CrossRef]
- Aharonov, D.; van Dam, W.; Kempe, J.; Landau, Z.; Lloyd, S.; Regev, O. Adiabatic quantum computation is equivalent to standard quantum computation. In Proceedings of the 45th Annual IEEE Symposium on Foundations of Computer Science, Rome, Italy, 17–19 October 2004; pp. 42–51. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, M.A.; Chuang, I.L. Quantum Computation and Quantum Information: 10th Anniversary Edition; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar] [CrossRef] [Green Version]
- Biamonte, J.D.; Love, P.J. Realizable Hamiltonians for universal adiabatic quantum computers. Phys. Rev. A 2008, 78, 012352. [Google Scholar] [CrossRef] [Green Version]
- Lucas, A. Ising formulations of many NP problems. Front. Phys. 2014, 2, 5. [Google Scholar] [CrossRef] [Green Version]
- Albash, T.; Lidar, D.A. Adiabatic quantum computation. Rev. Mod. Phys. 2018, 90, 015002. [Google Scholar] [CrossRef] [Green Version]
- Lanting, T.; Przybysz, A.J.; Smirnov, A.Y.; Spedalieri, F.M.; Amin, M.H.; Berkley, A.J.; Harris, R.; Altomare, F.; Boixo, S.; Bunyk, P.; et al. Entanglement in a quantum annealing processor. Phys. Rev. X 2014, 4, 021041. [Google Scholar] [CrossRef] [Green Version]
- Wu, F.Y. The Potts model. Rev. Mod. Phys. 1982, 54, 235–268. [Google Scholar] [CrossRef]
- Castellani, T.; Cavagna, A. Spin-glass theory for pedestrians. J. Stat. Mech. 2005, 2005, P05012. [Google Scholar] [CrossRef] [Green Version]
- Glover, F.; Kochenberger, G.; Du, Y. Quantum Bridge Analytics I: A tutorial on formulating and using QUBO models. Ann. J. Oper. Res. 2019, 17, 335–371. [Google Scholar] [CrossRef]
- Aramon, M.; Rosenberg, G.; Valiante, E.; Miyazawa, T.; Tamura, H.; Katzgraber, H.G. Physics-Inspired Optimization for Quadratic Unconstrained Problems Using a Digital Annealer. Front. Phys. 2019, 7, 48. [Google Scholar] [CrossRef]
- Pierangeli, D.; Rafayelyan, M.; Conti, C.; Gigan, S. Scalable spin-glass optical simulator. arXiv 2020, arXiv:2006.00828. [Google Scholar] [CrossRef]
- Yamamoto, Y.; Aihara, K.; Leleu, T.; Kawarabayashi, K.; Kako, S.; Fejer, M.; Inoue, K.; Takesue, H. Coherent Ising machines—Optical neural networks operating at the quantum limit. Npj Quantum Inf. 2017, 3, 49. [Google Scholar] [CrossRef] [Green Version]
- Fukushima-Kimura, B.H.; Handa, S.; Kamakura, K.; Kamijima, Y.; Sakai, A. Mixing time and simulated annealing for the stochastic cellular automata. arXiv 2020, arXiv:2007.11287. [Google Scholar]
- Cai, F.; Kumar, S.; Van Vaerenbergh, T.; Sheng, X.; Liu, R.; Li, C.; Liu, Z.; Foltin, M.; Yu, S.; Xia, Q.; et al. Power-efficient combinatorial optimization using intrinsic noise in memristor Hopfield neural networks. Nat. Electron. 2020, 3, 409–418. [Google Scholar] [CrossRef]
- Avron, J.E.; Elgart, A. Adiabatic Theorem without a Gap Condition. Commun. Math. Phys. 1999, 203, 445–463. [Google Scholar] [CrossRef] [Green Version]
- Ozfidan, I.; Deng, C.; Smirnov, A.Y.; Lanting, T.; Harris, R.; Swenson, L.; Whittaker, J.; Altomare, F.; Babcock, M.; Baron, C.; et al. Demonstration of nonstoquastic Hamiltonian in coupled superconducting flux qubits. arXiv 2019, arXiv:1903.06139. [Google Scholar] [CrossRef] [Green Version]
- Choi, V. Minor-embedding in adiabatic quantum computation: I. The parameter setting problem. Quantum Inf. Process. 2008, 7, 193–209. [Google Scholar] [CrossRef] [Green Version]
- Hamerly, R.; Inagaki, T.; McMahon, P.L.; Venturelli, D.; Marandi, A.; Onodera, T.; Ng, E.; Langrock, C.; Inaba, K.; Honjo, T.; et al. Experimental investigation of performance differences between coherent Ising machines and a quantum annealer. Sci. Adv. 2019, 5, aau0823. [Google Scholar] [CrossRef] [Green Version]
- King, A.D.; Bernoudy, W.; King, J.; Berkley, A.J.; Lanting, T. Emulating the coherent Ising machine with a mean-field algorithm. arXiv 2018, arXiv:1806.08422v1. [Google Scholar]
- Onodera, T.; Ng, E.; McMahon, P.L. A quantum annealer with fully programmable all-to-all coupling via Floquet engineering. arXiv 2019, arXiv:math-ph/0409035. [Google Scholar] [CrossRef]
- Childs, A.M.; Farhi, E.; Preskill, J. Robustness of adiabatic quantum computation. Phys. Rev. A 2001, 65, 012322. [Google Scholar] [CrossRef] [Green Version]
- Katzgraber, H.G.; Hamze, F.; Zhu, Z.; Ochoa, A.J.; Munoz-Bauza, H. Seeking Quantum Speedup Through Spin Glasses: The Good, the Bad, and the Ugly. Phys. Rev. X 2015, 5, 031026. [Google Scholar] [CrossRef]
- Sachdev, S. Quantum Phase Transitions; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Dziarmaga, J. Dynamics of a quantum phase transition: Exact solution of the quantum Ising model. Phys. Rev. Lett. 2005, 95, 245701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dziarmaga, J. Dynamics of a quantum phase transition and relaxation to a steady state. Adv. Phys. 2010, 59, 1063–1189. [Google Scholar] [CrossRef] [Green Version]
- Kibble, T.W.B. Topology of cosmic domains and strings. J. Phys. A Math. Gen. 1976, 9, 1387. [Google Scholar] [CrossRef]
- Kibble, T.W.B. Some implications of a cosmological phase transition. Phys. Rep. 1980, 67, 183–199. [Google Scholar] [CrossRef]
- Zurek, W.H. Cosmological experiments in superfluid helium? Nature 1985, 317, 505. [Google Scholar] [CrossRef] [Green Version]
- Francuz, A.; Dziarmaga, J.; Gardas, B.; Zurek, W.H. Space and time renormalization in phase transition dynamics. Phys. Rev. B 2016, 93, 075134. [Google Scholar] [CrossRef] [Green Version]
- Deffner, S. Kibble-Zurek scaling of the irreversible entropy production. Phys. Rev. E 2017, 96, 052125. [Google Scholar] [CrossRef] [Green Version]
- Gardas, B.; Dziarmaga, J.; Zurek, W.H. Dynamics of the quantum phase transition in the one-dimensional Bose-Hubbard model: Excitations and correlations induced by a quench. Phys. Rev. B 2017, 95, 104306. [Google Scholar] [CrossRef] [Green Version]
- Gardas, B.; Dziarmaga, J.; Zurek, W.H.; Zwolak, M. Defects in Quantum Computers. Sci. Rep. 2018, 8, 4539. [Google Scholar] [CrossRef] [Green Version]
- Venuti, L.C.; Albash, T.; Lidar, D.A.; Zanardi, P. Adiabaticity in open quantum systems. Phys. Rev. A 2016, 93, 032118. [Google Scholar] [CrossRef]
- Schollwöck, U. The density-matrix renormalization group. Rev. Mod. Phys. 2005, 77, 259–315. [Google Scholar] [CrossRef] [Green Version]
- Verstraete, F.; Cirac, J.I. Matrix product states represent ground states faithfully. Phys. Rev. B 2006, 73, 094423. [Google Scholar] [CrossRef] [Green Version]
- Rams, M.M.; Mohseni, M.; Eppens, D.; Jałowiecki, K.; Gardas, B. Approximate optimization, sampling, and spin-glass droplet discovery with tensor networks. Phys. Rev. E 2021, 104, 025308. [Google Scholar] [CrossRef] [PubMed]
- Czartowski, J.; Szymański, K.; Gardas, B.; Fyodorov, Y.V.; Życzkowski, K. Separability gap and large-deviation entanglement criterion. Phys. Rev. A 2019, 100, 042326. [Google Scholar] [CrossRef] [Green Version]
- Jałowiecki, K.; Więckowski, A.; Gawron, P.; Gardas, B. Parallel in time dynamics with quantum annealers. Sci. Rep. 2020, 10, 13534. [Google Scholar] [CrossRef]
- Gardas, B.; Rams, M.M.; Dziarmaga, J. Quantum neural networks to simulate many-body quantum systems. Phys. Rev. B 2018, 98, 184304. [Google Scholar] [CrossRef] [Green Version]
- Jałowiecki, K.; Rams, M.M.; Gardas, B. Brute-forcing spin-glass problems with CUDA. Comput. Phys. Commun. 2021, 260. [Google Scholar] [CrossRef]
- Luenberger, D.; Ye, Y. Linear and Nonlinear Programming; International Series in Operations Research & Management Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Hen, I.; Spedalieri, F.M. Quantum Annealing for Constrained Optimization. Phys. Rev. Appl. 2016, 5, 034007. [Google Scholar] [CrossRef] [Green Version]
- DWave Ocean Software Documentation. Available online: https://docs.ocean.dwavesys.com/en/stable (accessed on 29 June 2020).
- Gusmeroli, N.; Wiegele, A. EXPEDIS: An exact penalty method over discrete sets. Discret. Optim. 2022, 44, 100622. [Google Scholar] [CrossRef]
- PKP Polskie Linie Kolejowe, S.A. Public Procurement Website. Available online: https://zamowienia.plk-sa.pl/ (accessed on 3 February 2020).
- CPLEX Optimizer. Available online: https://www.ibm.com/analytics/cplex-optimizer (accessed on 29 June 2020).
- Optimization with PuLP. Available online: https://coin-or.github.io/pulp (accessed on 15 February 2021).
- Zbinden, S.; Bärtschi, A.; Djidjev, H.; Eidenbenz, S. Embedding Algorithms for Quantum Annealers with Chimera and Pegasus Connection Topologies. In Proceedings of the International Conference on High Performance Computing, Frankfurt, Germany, 22–25 June 2020; pp. 187–206. [Google Scholar]
- Pelofske, E.; Hahn, G.; Djidjev, H. Decomposition Algorithms for Solving NP-hard Problems on a Quantum Annealer. J. Signal Process. Syst. 2021, 93, 405–420. [Google Scholar] [CrossRef]
- Endo, S.; Cai, Z.; Benjamin, S.C.; Yuan, X. Hybrid Quantum-Classical Algorithms and Quantum Error Mitigation. J. Phys. Soc. Jpn. 2021, 90, 032001. [Google Scholar] [CrossRef]
- Ding, Y.; Chen, X.; Lamata, L.; Solano, E.; Sanz, M. Implementation of a Hybrid Classical-Quantum Annealing Algorithm for Logistic Network Design. SN Comput. Sci. 2021, 2, 68. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Heuristics | Case 1 | Case 2 | Case 3 | Case 4 |
|---|---|---|---|---|
| FLFS | 6 | 13 | 4 | 2 |
| FCFS | 5 | 5 | 5 | 2 |
| AMCC | 5 | 5 | 4 | 2 |
| Method | Case 1 | Case 2 | Case 3 | Case 4 | |
|---|---|---|---|---|---|
| QUBO approach | CPLEX | 0.54 | 1.40 | 0.73 | 0.20 |
| tensor network | 0.54 | 1.40 | 1.65 | 0.29 | |
| linear integer programming | 0.54 | 1.40 | 0.73 | 0.20 | |
| Simple heuristics | AMCC | 0.77 | 1.30 | 0.73 | 0.20 |
| FLFS | 0.54 | 1.71 | 0.73 | 0.20 | |
| FCFS | 0.77 | 1.30 | 0.95 | 0.20 | |
| css | Hard Constraints’ Penalty | ||
|---|---|---|---|
| 2 | |||
| 2 | |||
| 4 | |||
| 4 | |||
| 6 | |||
| 6 |
| Features | Line 216 | Line 191 | ||||
|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | Enlarged | ||
| problem size (# logical bits) | 48 | 198 | 198 | 198 | 198 | 594 |
| # edges | 395 | 1851 | 2038 | 2180 | 1831 | 5552 |
| density (vs. full graph) | ||||||
| embedding into | Chimera | Chimera | Chimera | Ideal Chimera | Chimera | Pegasus |
| approximate # physical bits | 373 | <2048 | <2048 | ≈ 2048 | <2048 | <5760 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Domino, K.; Koniorczyk, M.; Krawiec, K.; Jałowiecki, K.; Deffner, S.; Gardas, B. Quantum Annealing in the NISQ Era: Railway Conflict Management. Entropy 2023, 25, 191. https://doi.org/10.3390/e25020191
Domino K, Koniorczyk M, Krawiec K, Jałowiecki K, Deffner S, Gardas B. Quantum Annealing in the NISQ Era: Railway Conflict Management. Entropy. 2023; 25(2):191. https://doi.org/10.3390/e25020191
Chicago/Turabian StyleDomino, Krzysztof, Mátyás Koniorczyk, Krzysztof Krawiec, Konrad Jałowiecki, Sebastian Deffner, and Bartłomiej Gardas. 2023. "Quantum Annealing in the NISQ Era: Railway Conflict Management" Entropy 25, no. 2: 191. https://doi.org/10.3390/e25020191