4.1. Experiment with Artificial Data
An experiment with artificial data in [
27,
46] is adopted to demonstrate the effectiveness and rationality of the proposed multi-source information fusion method. It is assumed that there are five independent information sources. Each information source can be modeled as an independent body of evidence. Since the traditional Dempster combination rule can be directly used for evidence fusion if there is no conflict, for the artificial data in [
46] it is assumed that there is conflict evidence and the conflict is caused by an unreliable sensor or other unknown reasons. Thus, similar to [
27], the artificial data with unreliable evidence in [
46] is adopted to verify the effectiveness of the proposed method for multi-source information fusion with conflict data.
The artificial data in [
27,
46] are as follows. Consider a target recognition problem. Three potential targets are, respectively, denoted as
A,
B and
C in the FOD denoted as
. As presented in
Table 1, the multi-source information is modeled as BPAs denoted as
,
,
,
and
. Intuitively, the evidence from the second information source (
) is contrary to the other four pieces of evidence, and
A will be the recognized target according to the highest belief value on
A in the other four sources of information.
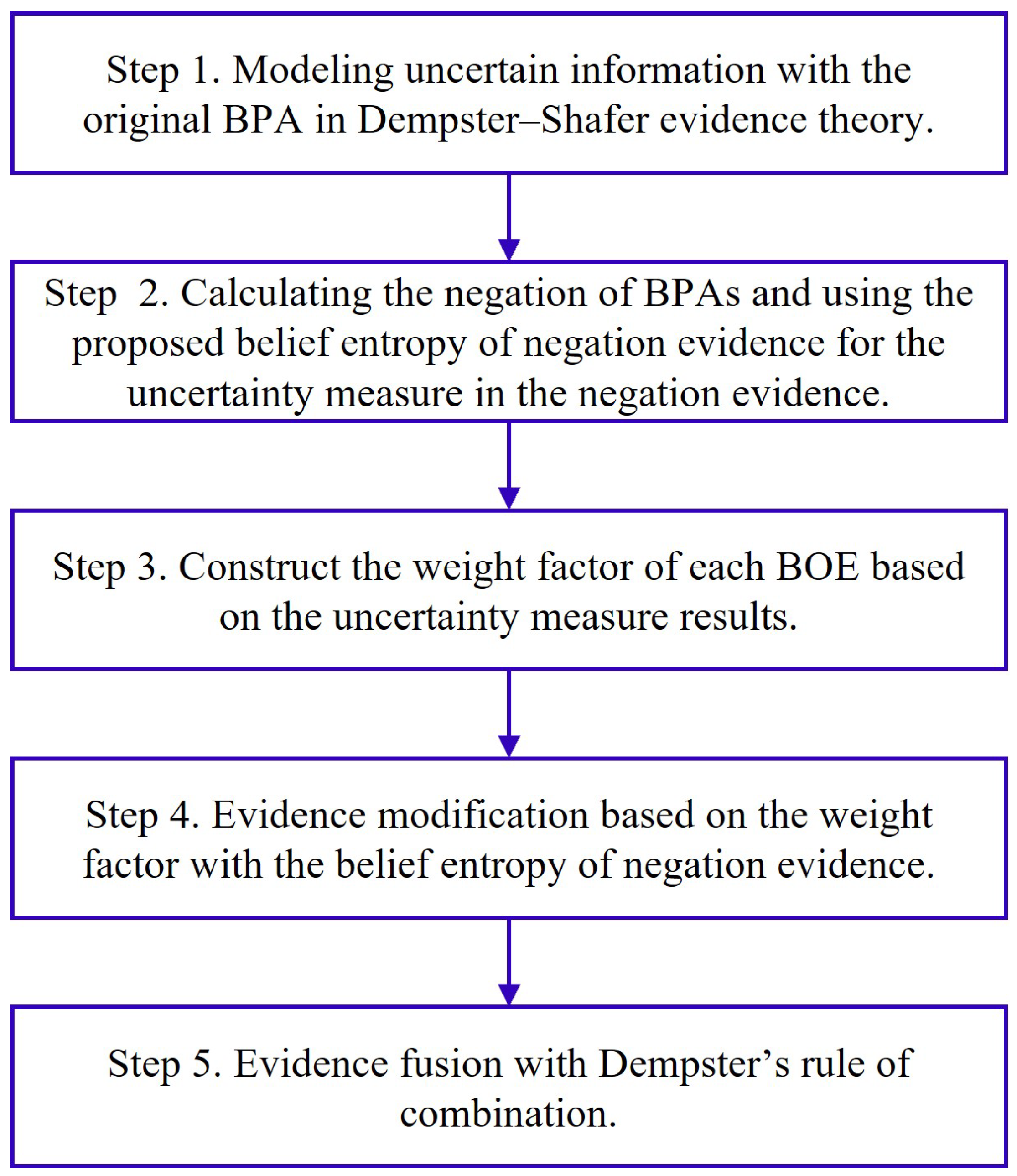
The steps of the proposed method of multi-source information fusion considering the uncertainty of negation evidence in the experiment are as follows.
For the first step, the BPAs are adopted from [
27,
46], and the result is shown in
Table 1.
For the second step, with Equations (
10) and (
11), the belief entropy of negation evidence of
is calculated as follows:
Similarly, the belief entropy of negation evidence of to can be calculated, and the results are as follows: , , and .
For the third step, with Equation (
12), the weight of each body of evidence is calculated as follows:
For the fourth step, the mass function of each proposition after modification in
Table 1 can be calculated with Equation (
13). The calculation results are as follows:
Finally, for the fifth step, there are five original pieces of evidence; thus, with Dempster’s rule of combination and Equation (
14), the modified evidence is fused four times. The information fusion process and results are listed as follows:
The multi-source information fusion results with the proposed method and other methods in the experiment are presented in
Table 2. With the proposed method, it can be inferred that target
A is the recognized target, which is consistent with other methods in [
27,
46,
47,
48]. Compared to the fusion results based on the other methods in [
46,
47], the proposed method has the highest belief (
) on the recognized target
A. By considering the uncertainty of negation evidence, the proposed method contributes to a higher belief degree on the expected target than the methods in [
46,
47]. The methods in [
27,
48] have higher belief degree on target
A than the proposed method. However, it should be noted that both Yuan et al.’s method in [
48] and Xiao’s method in [
27] use the distance-based measure and the belief entropy-based measure simultaneously in the flowchart of the method. Since both the distance-based measure and the belief entropy-based measure are based on BPA functions, there may exist coupling weight factors. Thus, these two methods should be used cautiously in some cases.
4.2. Experiment in Fault Diagnosis
In this section, the proposed method is applied to an application in fault diagnosis of a motor rotor. The practical data in [
49] is adopted for the experiment. Suppose that there are three types of faults in a motor rotor.
means {
Rotor unbalance},
means {
Rotor misalignment} and
means {
Pedestal looseness}. The vibration signals are collected from three vibration acceleration sensors which are placed in different installation positions. The acceleration vibration frequency amplitudes at the frequencies of
Freq1,
Freq2 and
Freq3 are taken as the fault feature variables. The data for fault diagnosis modeled as BPAs are provided in
Table 3:
,
and
, respectively, denote the BOEs reported from these three vibration acceleration sensors.
Apply the proposed method for multi-source information fusion in fault diagnosis.
- Step 1
Modeling uncertain information with BPA in Dempster–Shafer evidence theory.
In this paper, BPAs of sensor reports are directly adopted from [
49], as represented in
Table 3. For more details about generating BPAs of
Table 3, please refer to [
49].
- Step 2
Using the proposed belief entropy of negation evidence for uncertainty measure of the negation of BPAs.
In the proposed method, the uncertainty of sensor reports is measured based on the belief entropy of negation evidence. With Equations (
10) and (
11), the negation evidence and the belief entropy of negation evidence of each BOE under the vibration acceleration frequency of
Freq1 is calculated as follows:
Similarly, the belief entropy of negation evidence of sensor reports under
Freq2 and
Freq3 can be calculated with the proposed method. The measuring results with the proposed method are listed in
Table 4.
- Step 3
Construct the weight factor of each BOE based on the uncertainty measure result.
With Equation (
12), for the vibration acceleration frequency of
, the weight of each BOE for evidence modification is calculated as follows:
The weight of different sensor reports under
and
is shown in
Table 5.
- Step 4
Evidence modification based on the weight factor with the belief entropy of negation evidence.
With Equation (
13), the modified mass function for each information source on fault types with respect to
can be calculated as follows:
The modified mass function for
and
can also be calculated with Equation (
13). The result is shown in
Table 6.
- Step 5
Evidence fusion with Dempster’s rule of combination.
With Equation (
14), for the vibration acceleration frequency of
, there are three information sources, and the modified mass function will be fused with Dempster’s rule of combination by two times, shown as follows:
The fusion results for
and
are shown in
Table 7.
According to the fusion results in
Table 7, the diagnosis result after evidence fusion is that
is the recognized target. The conflict of sensor reports in the application is overcome with the proposed method, even though the belief degree on
under
is 0.8176, 0.5658 and 0.2403, respectively.
Table 8 is a comparison between the proposed methods and some other works. It shows that the diagnosis result of the proposed method is in accordance with the methods in [
49,
50], and the fault type is
. Moreover, the proposed method has a higher belief degree on fault type
than the method in the literature under different frequencies.
A few reasons contribute to the effectiveness of the proposed conflict evidence fusion method. Firstly, the sensor data is preprocessed properly before applying the combination rules, which is a very important step in combining conflict evidence. Secondly, the new method is based on an improved belief entropy of negation evidence. The new measure can measure the negation uncertainty information in the Dempster–Shafer evidence theory framework, which contributes to a more accurate experiment result. Finally, the advantages in Dempster’s combination rule, such as satisfying the commutativity and associativity, guarantee the rationality of the fusion result.
4.3. Discussion and Limitation
A new method of measuring uncertainty in the negation evidence and its application in multi-source information fusion is proposed in this work. The contribution of the work can be summarized as follows. (1) An improved belief entropy is proposed to measure the uncertainty of negation evidence. Currently, all the measures in the framework of Dempster–Shafer evidence theory are designed for the original evidence, and there is no uncertainty measure for the negation evidence [
31,
41]. The improved belief entropy of the negation BPA function provides a new perspective to quantify the uncertainty degree of uncertain information. (2) An improved multi-source information fusion method considering the uncertainty in the negation information is proposed. Both the original evidence and the negation evidence can model uncertain information [
42,
44]. The negation evidence should be regarded as an important source of uncertain information and handled cautiously. The proposed method introduces a new method of addressing the uncertainty degree and fusion method of negation evidence simultaneously. The experimental results of experiments with artificial data and in fault diagnosis verify the rationality and effectiveness of the proposed methods.
It should be noted that there are limitations in the work. First, many new measures in Dempster–Shafer evidence theory framework are not taken into consideration in addressing the uncertain degree of negation evidence. Second, how to measure the uncertainty among dependent bodies of evidence is ignored in the proposed method. Third, other improved combination rules can be taken into consideration for evidence fusion. Last but not least, only two data sets are adopted to illustrate and verify the effectiveness of the proposed method. The method limitation is not clear for many other data sets and cases in artificial intelligence.
According to the aforementioned limitations, possible future research work is as follows. On the one hand, there is still no uncertainty measure that is accepted by all researchers in the evidence theory. A general uncertainty measure for negation evidence needs further study. On the other hand, although uncertainty measure-based weighted BPA has been widely used in multi-source information fusion, it cannot address the issue of dependent evidence fusion. How to address conflict and dependent evidence considering the uncertainty measure is a promising topic in multi-source information fusion.




{kind=link}