Multimode Decomposition and Wavelet Threshold Denoising of Mold Level Based on Mutual Information Entropy


Abstract
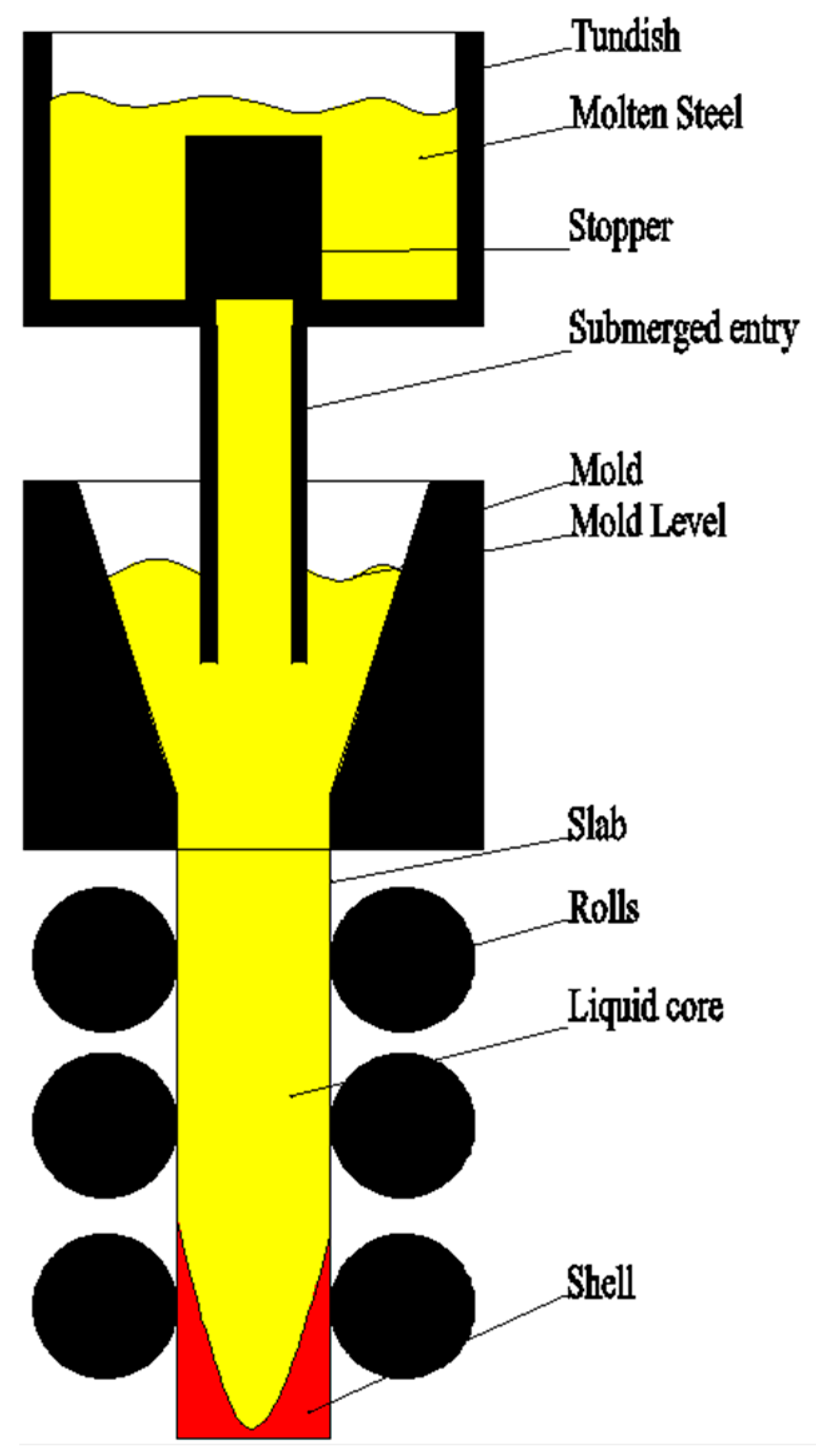
:1. Introduction
2. Basic Algorithm Research
2.1. Variational Mode Decomposition (VMD)
| Algorithm 1 The calculation process of the VMD |
| Step 1: Initialize 、、 and n to zero; |
| Step 2: n = n + 1, execute the entire loop; |
| Step 3: Execute the loop k = k + 1 until k = K, update : ; |
| Step 4: Execute the loop k = k + 1, until k = K, update : ; |
| Step 5: Use to update λ; |
| Step 6: Given the discrimination condition ε > 0, if the iteration stop condition is satisfied, all the cycles are stopped and the result is output; K IMFs are obtained. |
2.2. Mutual Information Entropy (MIE)
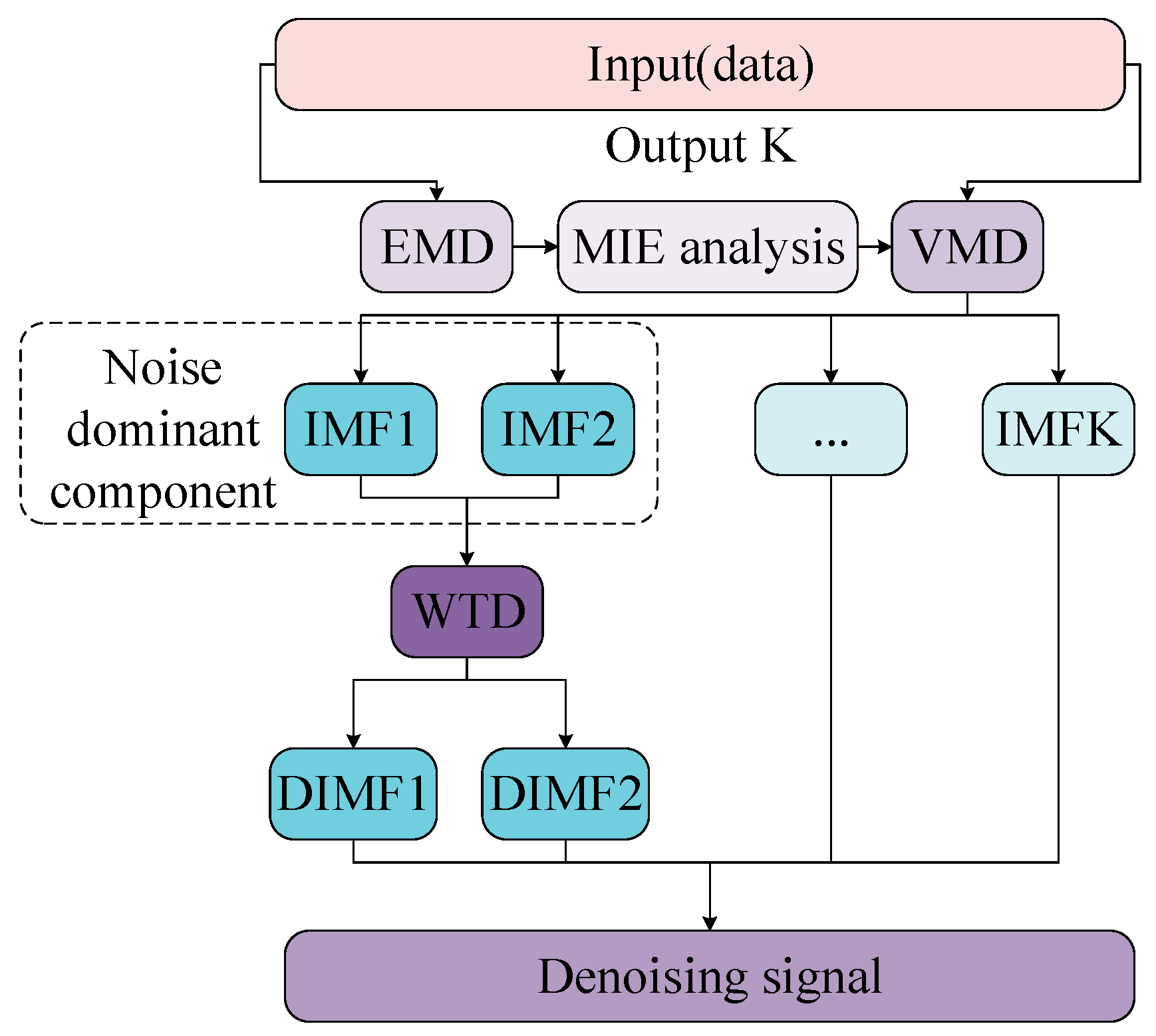
3. Denoising Algorithm Using VMD-WTD
| Algorithm 2 The variational mode decomposition (VMD)–wavelet threshold |
| Step 1. Decompose the original signal with EMD to obtain several IMFs. |
| Step 2. Analyze the MIE between IMFs and determine the effective mode number K. |
| Step 3. Decompose the original signal by VMD based on the mode number K determined by the EMD. |
| Step 4. Analyze the MIE between IMFs and find the boundary line between high frequency IMFs and low frequency IMFs. |
| Step 5. Denoise high frequency IMFs with WTD, retaining low frequency IMFs and retaining effective information as much as possible. |
| Step 6. Perform VMD reconstruction on all low frequency IMFs and denoise high frequency IMFs to obtain a denoised signal. |
4. Numerical Experiments
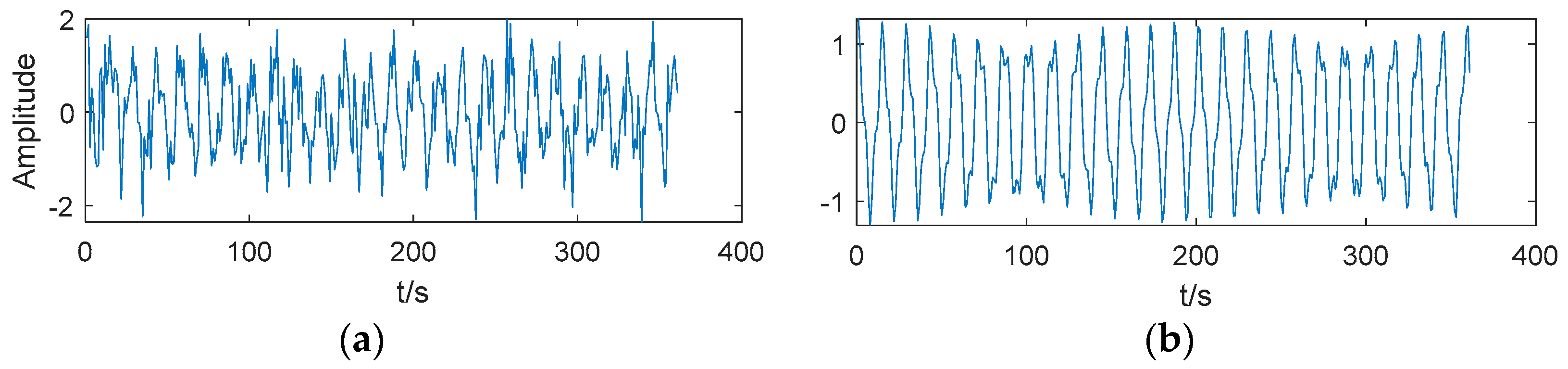
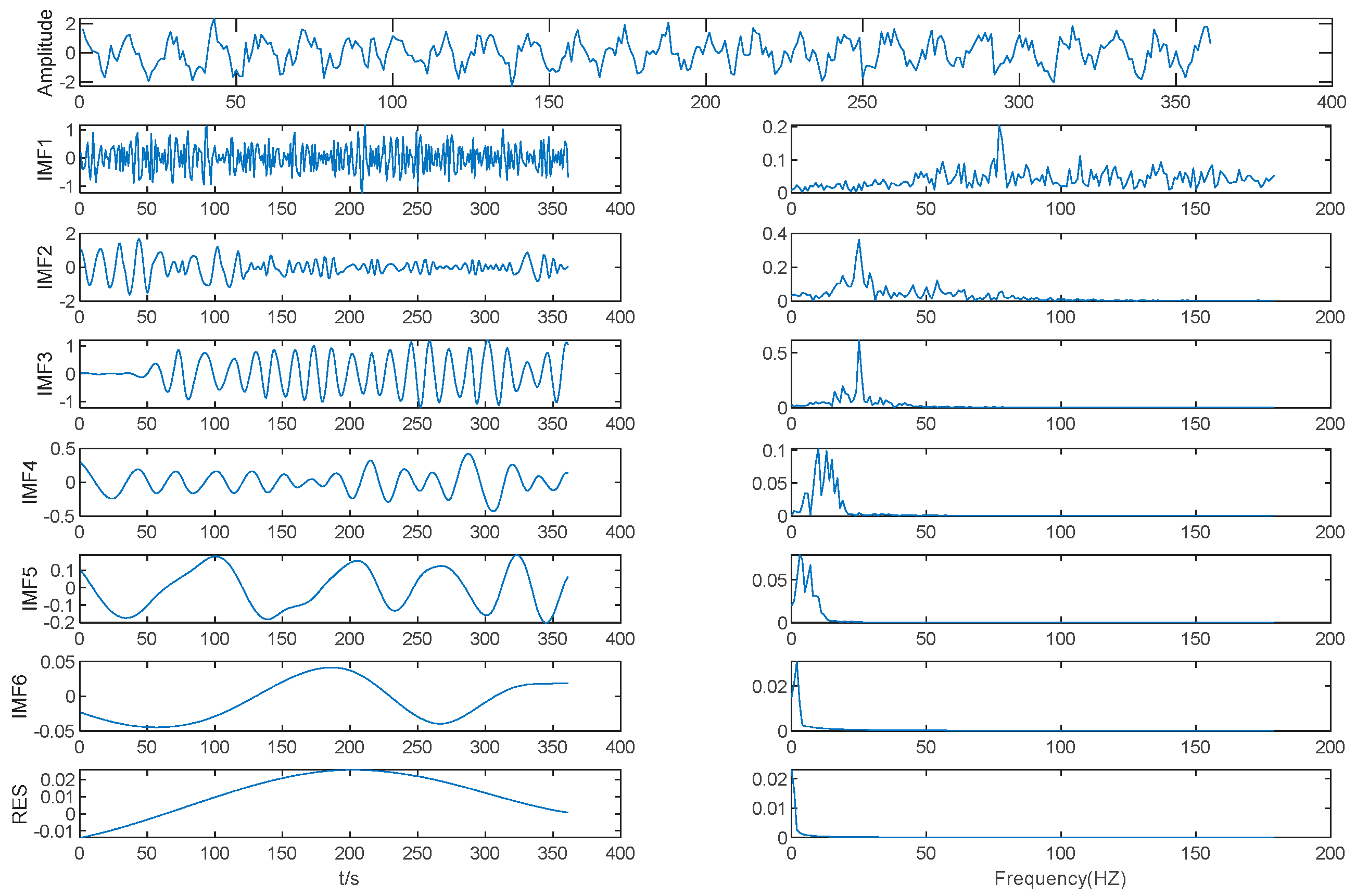
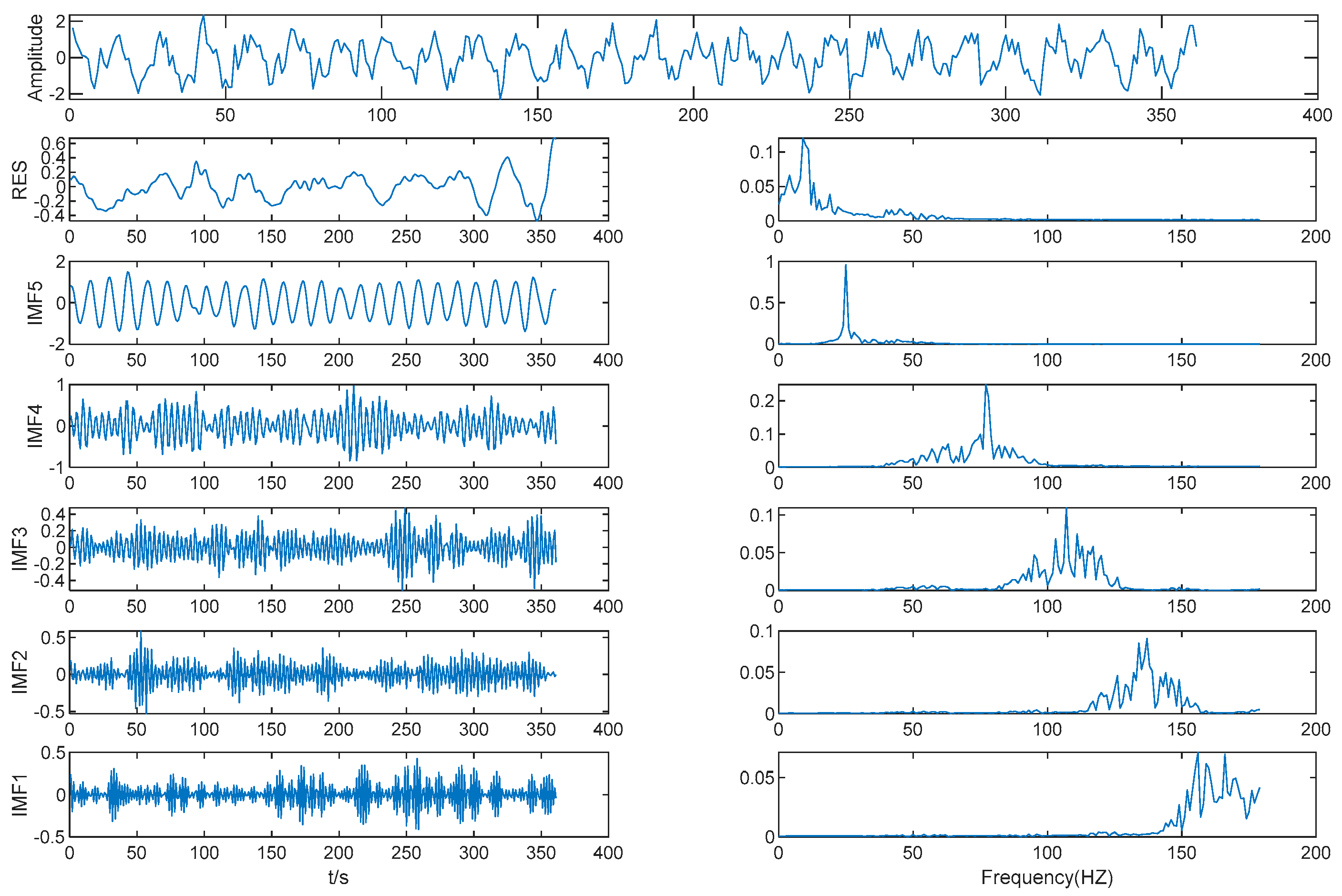
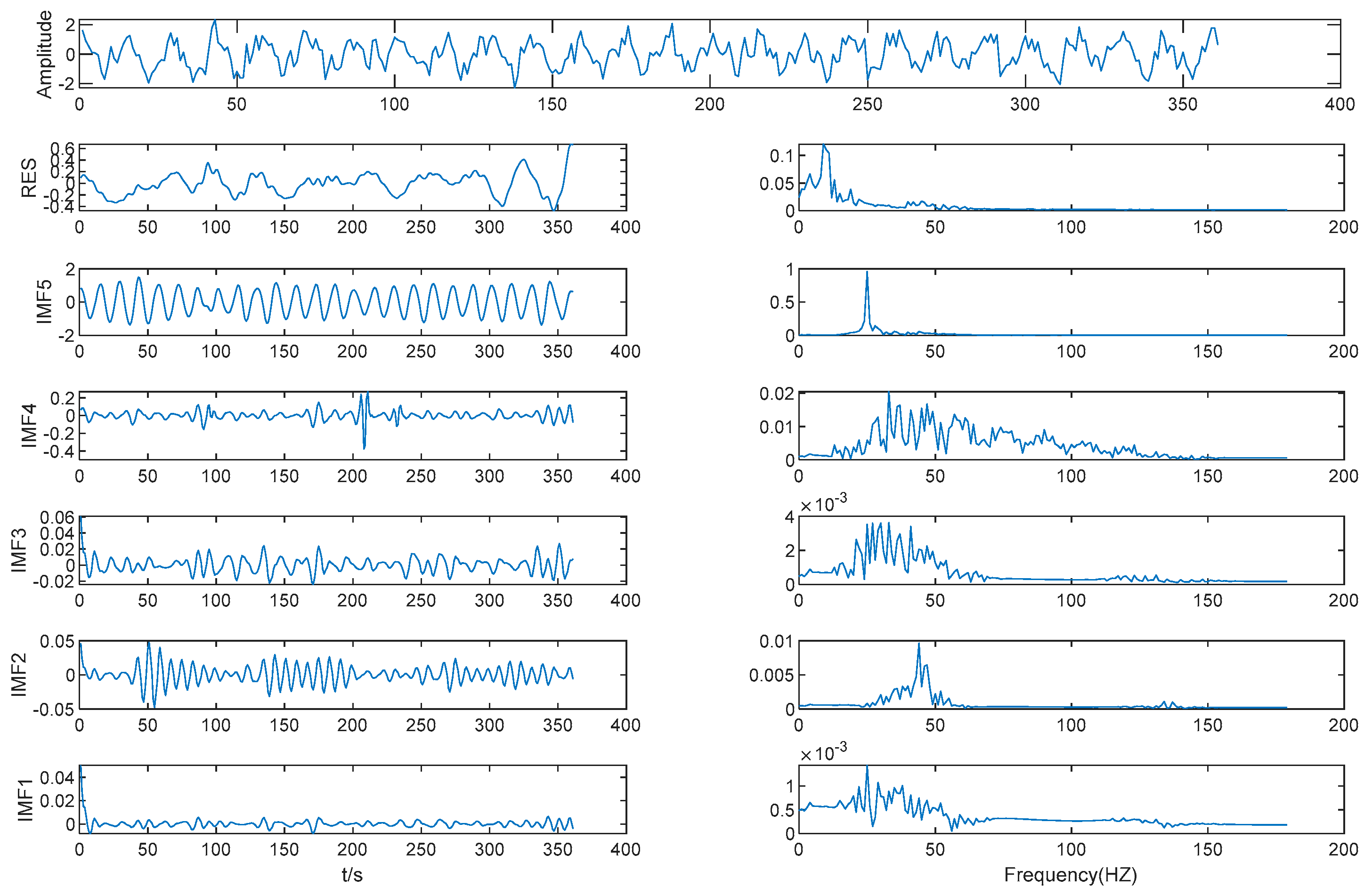
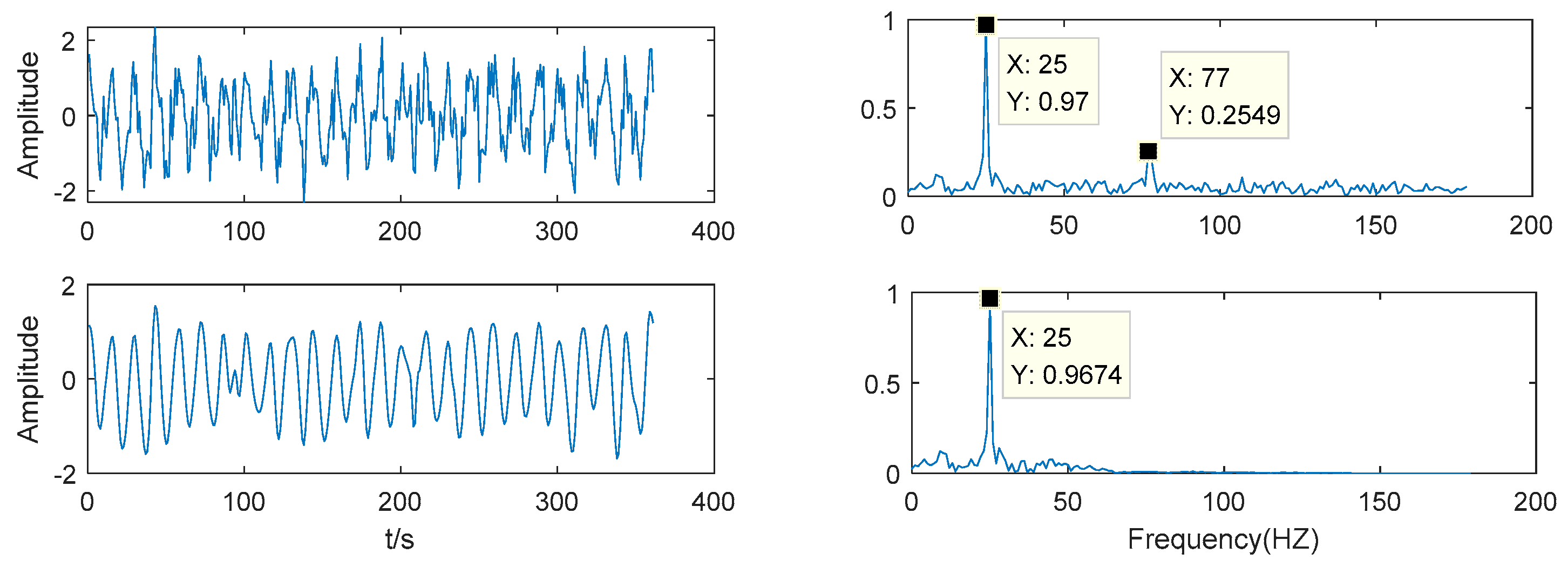
4.1. Analog Signal Test
n = 0.5randn(t)
y = y1 + n
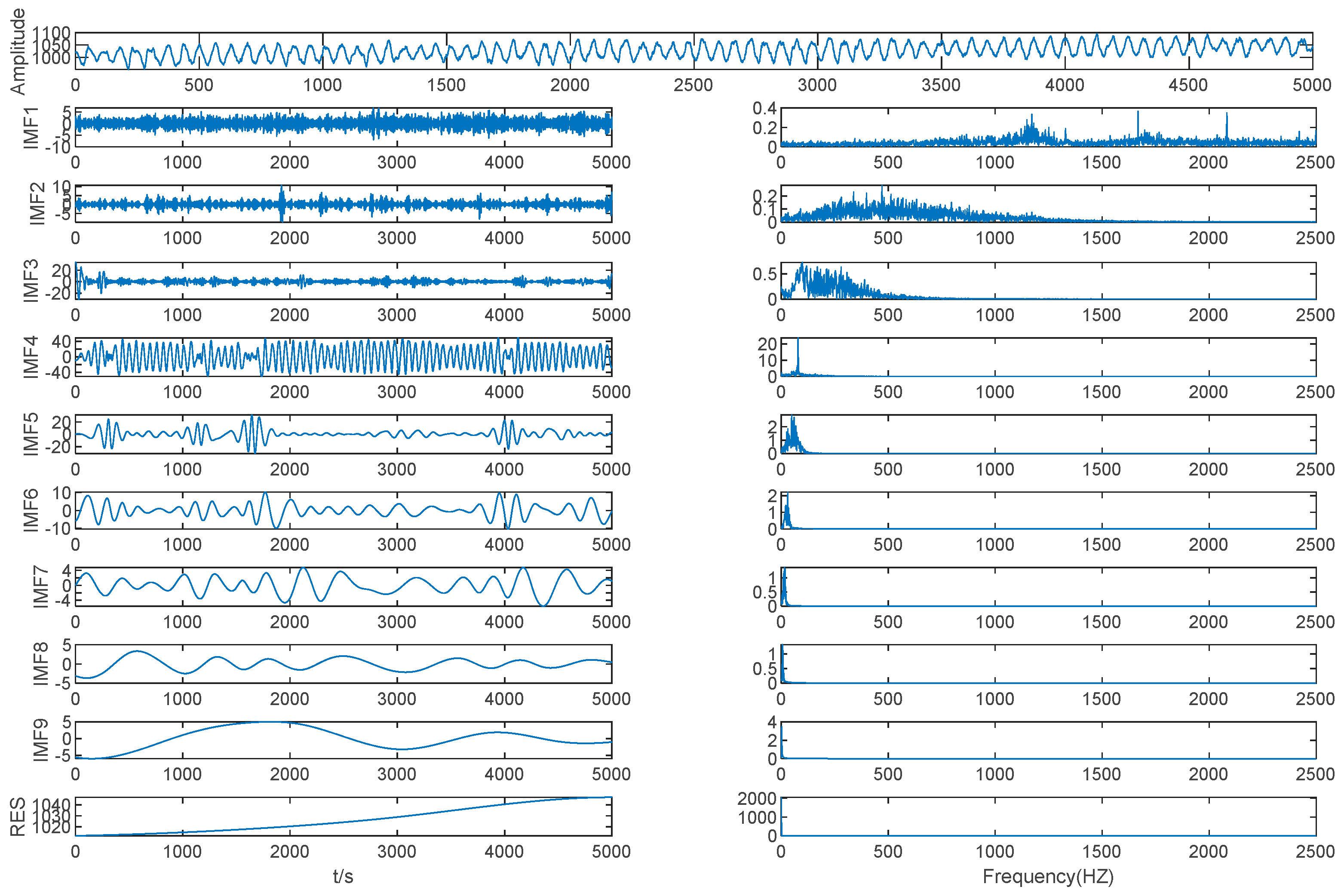
4.2. Mold Level Data Source
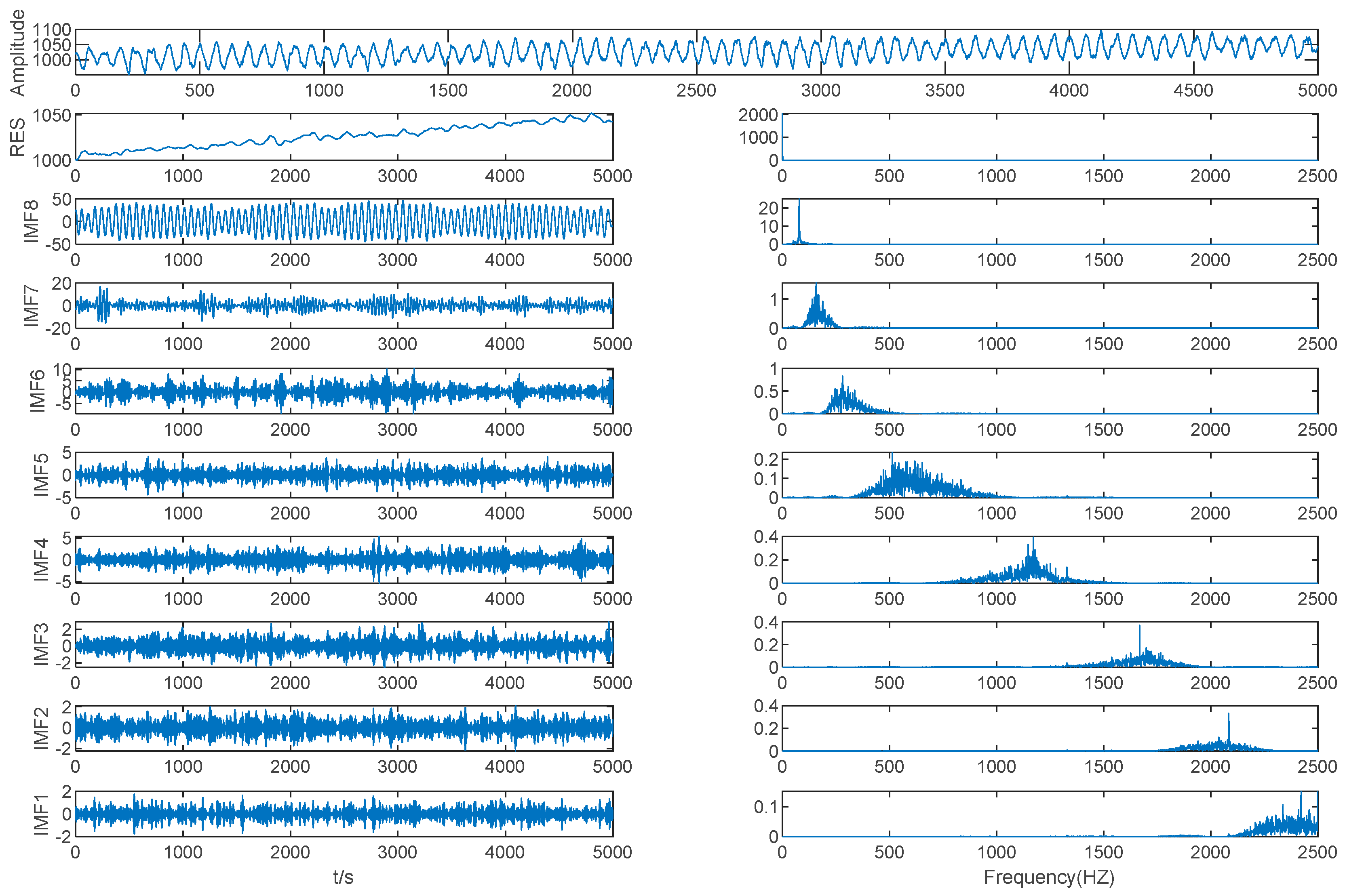
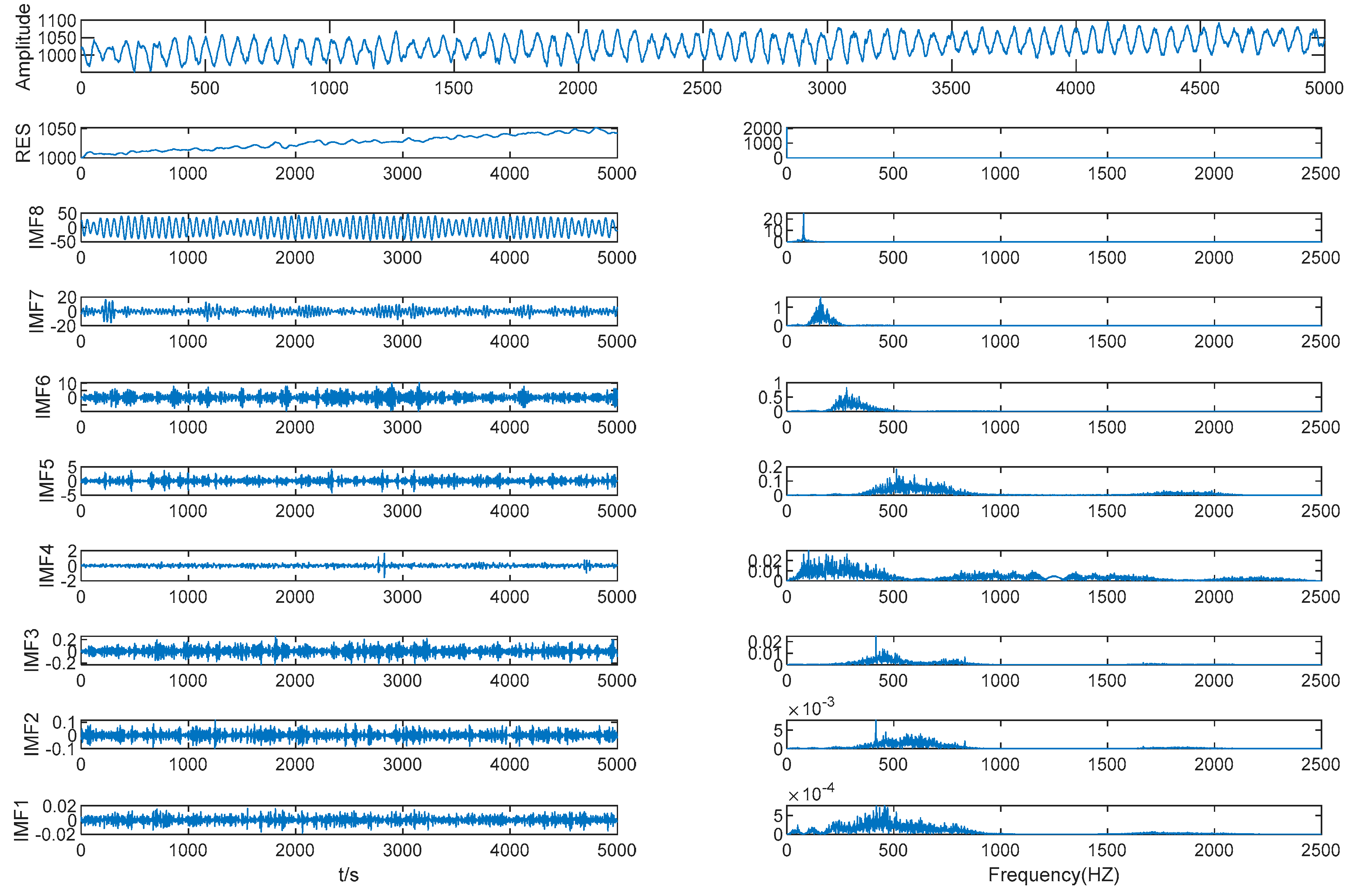
4.3. Denoising the Mold Level Signal Using VMD-WTD
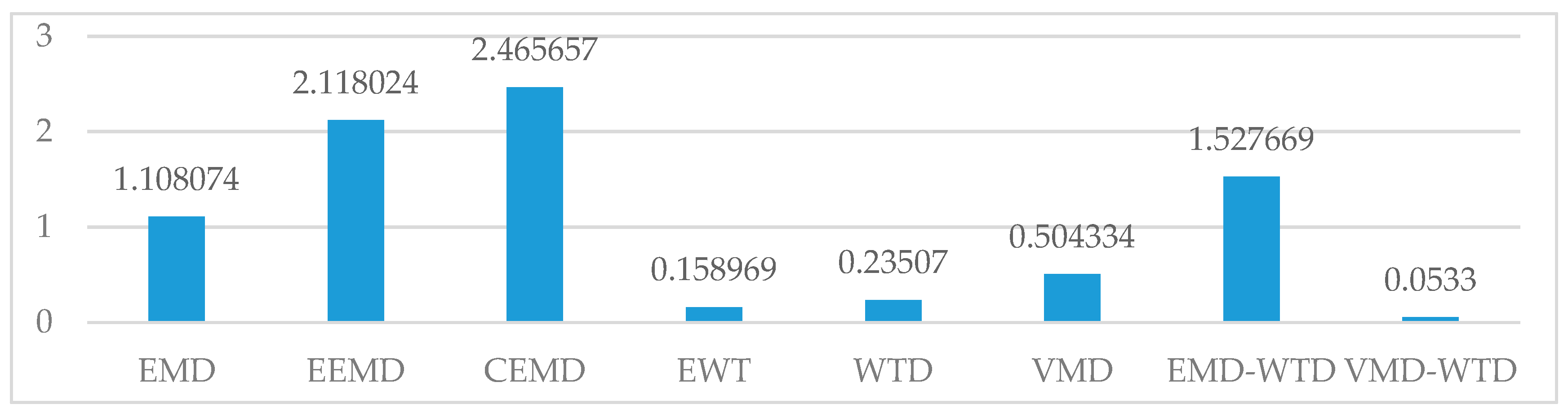
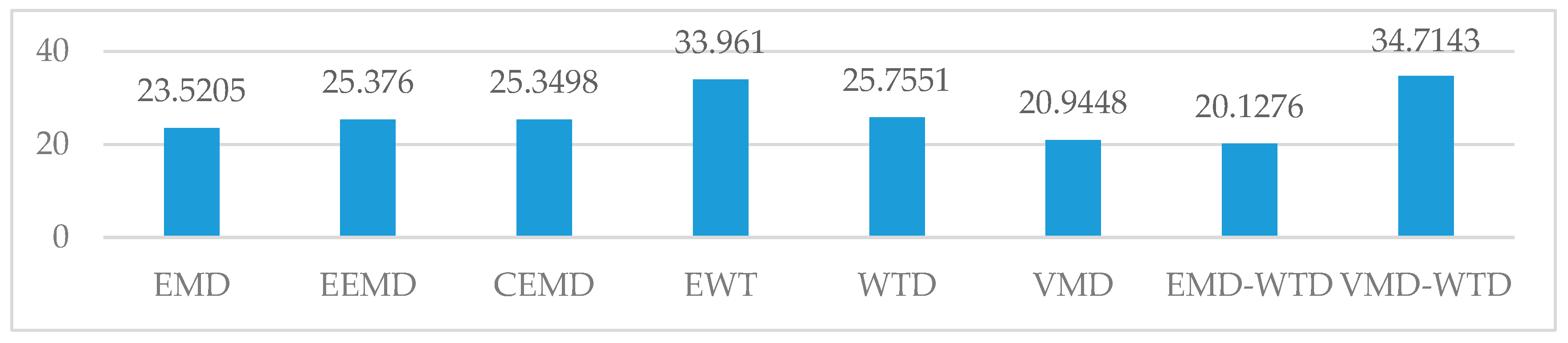
4.4. The Discussion of Results
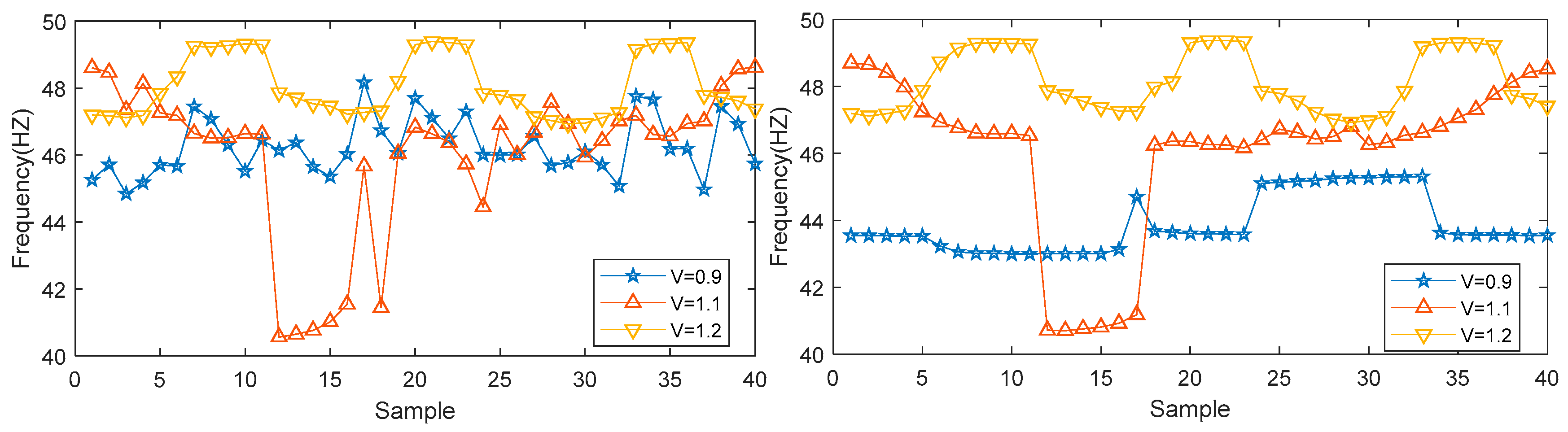
5. Application of the Mold Level Denoised Signal
6. Conclusions
- (1)
- This is the first multimode decomposition denoising algorithm to be proposed.
- (2)
- It is a new denoising algorithm using multimode decomposition and WTD to be applied to mold level control.
- (3)
- In comparison with other algorithms, the proposed algorithm is a better denoising algorithm with higher SNR and lower RMSE.
- (4)
- By using the denoising algorithm and feature extraction method proposed in this paper, the center frequency information is determined. Compared with the feature extraction information without denoising, the experimental results show that the proposed denoising algorithm can effectively improve the recognition of the casting speed.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ataka, M. Rolling Technology and Theory for the Last 100 Years: The Contribution of Theory to Innovation in Strip Rolling Technology. ISIJ Int. 2015, 55, 89–102. [Google Scholar] [CrossRef] [Green Version]
- Man, Y.; Hebi, Y.; Dacheng, F. Real-time Analysis on Non-uniform Heat Transfer and Solidification in Mould of Continuous Casting Round Billets. ISIJ Int. 2004, 44, 1696–1704. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, M.; Mizukami, H.; Kitagawa, T.; Kawakami, K.; Uchida, S.; Komatsu, Y. Development of a new mold oscillation mode for high-speed continuous-casting of steel slabs. ISIJ Int. 1991, 31, 254–261. [Google Scholar] [CrossRef]
- Yamauchi, A.; Itoyama, S.; Kishimoto, Y.; Tozawa, H.; Sorimachi, K. Cooling behavior and slab surface quality in continuous casting with alloy 718 mold. ISIJ Int. 2002, 42, 1094–1102. [Google Scholar] [CrossRef]
- Dussud, M.; Galichet, S.; Foulloy, L.P. Application of fuzzy logic control for continuous casting mold level control. IEEE Trans. Control Syst. Technol. 1998, 6, 246–256. [Google Scholar] [CrossRef]
- Hesketh, T.; Clements, D.J.; Williams, R. Adaptive mold level control for continuous steel slab casting. Automatica 1993, 29, 851–864. [Google Scholar] [CrossRef]
- De Keyser, R. Predictive mould level control in a continuous steel casting line. IFAC Proc. Vol. 1997, 29, 6281–6286. [Google Scholar] [CrossRef]
- DeKeyser, R.M.C. Improved mould-level control in a continuous steel casting line. Control Eng. Pract. 1997, 5, 231–237. [Google Scholar] [CrossRef]
- Keyser, C.; Martien, D.; Verhasselt, F.K.R.D. Model Identification for the Mould Level Control Loop in a Continuous Casting Machine. In Proceedings of the 7th IFAC Symposium on Automation in Mining, Mineral and Metal Processing, Beijing, China, 26–28 August 1992; Volume 25, pp. 107–112. [Google Scholar]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef] [Green Version]
- Frei, M.G.; Osorio, I. Intrinsic time-scale decomposition: Time-frequency-energy analysis and real-time filtering of non-stationary signals. Proc. R. Soc. A Math. Phys. Eng. Sci. 2007, 463, 321–342. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.L.C.; Shih, H.H.; Zheng, Q.N.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Lei, Y.G.; Lin, J.; He, Z.J.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Bajaj, V.; Pachori, R.B. Classification of Seizure and Nonseizure EEG Signals Using Empirical Mode Decomposition. IEEE T. Inf. Technol. Biomed. 2012, 16, 1135–1142. [Google Scholar] [CrossRef]
- Priya, A.; Yadav, P.; Jain, S.; Bajaj, V. Efficient method for classification of alcoholic and normal EEG signals using EMD. J. Eng. 2018, 2018, 166–172. [Google Scholar] [CrossRef]
- Prasanna Kumar, M.K.; Kumaraswamy, R. Single-channel speech separation using combined EMD and speech-specific information. Int. J. Speech Technol. 2017, 20, 1037–1047. [Google Scholar] [CrossRef]
- Guo, Z.H.; Zhao, W.G.; Lu, H.Y.; Wang, J.Z. Multi-step forecasting for wind speed using a modified EMD-based artificial neural network model. Renew. Energy 2012, 37, 241–249. [Google Scholar] [CrossRef]
- Tang, J.; Zhao, L.; Yue, H.; Yu, W.; Chai, T. Vibration Analysis Based on Empirical Mode Decomposition and Partial Least Square. Int. Workshop Automob. Power Energy Eng. 2011, 16, 646–652. [Google Scholar] [CrossRef] [Green Version]
- Xu, G.; Tian, W.; Qian, L. EMD- and SVM-based temperature drift modeling and compensation for a dynamically tuned gyroscope (DTG). Mech. Syst. Signal Process. 2007, 21, 3182–3188. [Google Scholar] [CrossRef]
- Luo, L.; Yan, Y.; Xie, P.; Sun, J.; Xu, Y.; Yuan, J. Hilbert-Huang transform, Hurst and chaotic analysis based flow regime identification methods for an airlift reactor. Chem. Eng. J. 2012, 181, 570–580. [Google Scholar] [CrossRef]
- Srinivasan, R.; Rengaswamy, R.; Miller, R. A modified empirical mode decomposition (EMD) process for oscillation characterization in control loops. Control Eng. Pract. 2007, 15, 1135–1148. [Google Scholar] [CrossRef]
- Rakshit, M.; Das, S. An efficient ECG denoising methodology using empirical mode decomposition and adaptive switching mean filter. Biomed. Signal Process. Control 2018, 40, 140–148. [Google Scholar] [CrossRef]
- Chen, W.; Chen, Y.; Liu, W. Ground roll attenuation using improved complete ensemble empirical mode decomposition. J. Seism. Explor. 2016, 25, 485–495. [Google Scholar]
- Chen, W.; Song, H. Automatic noise attenuation based on clustering and empirical wavelet transform. J. Appl. Geophys. 2018, 159, 649–665. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, D.; Chen, Y. Random noise reduction using a hybrid method based on ensemble empirical mode decomposition. J. Seism. Explor. 2017, 26, 227–249. [Google Scholar]
- Klionskiy, D.; Kupriyanov, M.; Kaplun, D. Signal denoising based on empirical mode decomposition. J. Vibroeng. 2017, 19, 5560–5570. [Google Scholar] [CrossRef]
- Klionskiy, D.M.; Kaplun, D.I.; Geppener, V.V. Empirical Mode Decomposition for Signal Preprocessing and Classification of Intrinsic Mode Functions. Pattern Recognit. Image Anal. 2018, 28, 122–132. [Google Scholar] [CrossRef]
- Butusov, D.; Karimov, T.; Voznesenskiy, A.; Kaplun, D.; Andreev, V.; Ostrovskii, V. Filtering Techniques for Chaotic Signal Processing. Electronics 2018, 7, 450. [Google Scholar] [CrossRef]
- Chiementin, X.; Kilundu, B.; Rasolofondraibe, L.; Crequy, S.; Pottier, B. Performance of wavelet denoising in vibration analysis: Highlighting. J. Vib. Control 2012, 18, 850–858. [Google Scholar] [CrossRef]
- Su, M.; Zheng, J.; Yang, Y.; Wu, Q. A new multipath mitigation method based on adaptive thresholding wavelet denoising and double reference shift strategy. GPS Solut. 2018, 22. [Google Scholar] [CrossRef]
- Zhu, Q. Wavelet Packet Multi-Threshold Value and Empirical Mode Decomposition Based Coal Layer Micro-Earthquake Signals De-Noising Method, Involves Performing Signal Reconstruction Until Waveform Is Processed to Obtain De-Noising Signal. Patent No. CN107991706-A, 4 May 2018. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Xiao, Q.; Li, J.; Zeng, Z. A denoising scheme for DSPI phase based on improved variational mode decomposition. Mech. Syst. Signal Process. 2018, 110, 28–41. [Google Scholar] [CrossRef]
- Yu, S.; Ma, J. Complex Variational Mode Decomposition for Slop-Preserving Denoising. IEEE Trans. Geosci. Remote Sens. 2018, 56, 586–597. [Google Scholar] [CrossRef]
- Omitaomu, O.A.; Protopopescu, V.A.; Ganguly, A.R. Empirical Mode Decomposition Technique With Conditional Mutual Information for Denoising Operational Sensor Data. IEEE Sensors J. 2011, 11, 2565–2575. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMF (1–2) | IMF (2–3) | IMF (3–4) | IMF (4–5) | IMF (5–6) | IMF (6–res) |
|---|---|---|---|---|---|
| 4.07 | 4.02 | 4.11 | 4.01 | 4.03 | 4.25 |
| IMF (1–2) | IMF (2–3) | IMF (3–4) | IMF (4–5) | IMF (5–res) |
|---|---|---|---|---|
| 3.77 | 3.83 | 3.70 | 4.02 | 3.89 |
| IMF (1–2) | IMF (2–3) | IMF (3–4) | IMF (4–5) | IMF (5–6) | IMF (6–7) | IMF (7–8) | IMF (8–9) | IMF (9–res) |
|---|---|---|---|---|---|---|---|---|
| 1.1859 | 0.7567 | 1.2681 | 1.6978 | 1.7153 | 2.2602 | 2.5477 | 3.1388 | 4.1474 |
| IMF (1–2) | IMF (2–3) | IMF (3–4) | IMF (4–5) | IMF (5–6) | IMF (6–7) | IMF (7–8) | IMF (8–res) |
|---|---|---|---|---|---|---|---|
| 1.6254 | 1.6488 | 1.4727 | 1.4114 | 1.4858 | 1.4476 | 1.8755 | 2.2944 |
| EMD | EEMD | CEEMD | EWT | WTD | VMD | EMD-WTD | VMD-WTD | |
|---|---|---|---|---|---|---|---|---|
| RMSE | 1.108074 | 2.118024 | 2.465657 | 0.158969 | 0.23507 | 0.504334 | 1.527669 | 0.0533 |
| RNS | 23.5205 | 25.376 | 25.3498 | 33.9610 | 25.7551 | 20.9448 | 20.1276 | 34.7143 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, Z.; Su, W.; Hu, Q. Multimode Decomposition and Wavelet Threshold Denoising of Mold Level Based on Mutual Information Entropy. Entropy 2019, 21, 202. https://doi.org/10.3390/e21020202
Lei Z, Su W, Hu Q. Multimode Decomposition and Wavelet Threshold Denoising of Mold Level Based on Mutual Information Entropy. Entropy. 2019; 21(2):202. https://doi.org/10.3390/e21020202
Chicago/Turabian StyleLei, Zhufeng, Wenbin Su, and Qiao Hu. 2019. "Multimode Decomposition and Wavelet Threshold Denoising of Mold Level Based on Mutual Information Entropy" Entropy 21, no. 2: 202. https://doi.org/10.3390/e21020202